大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
参考:
Eigen 的简介和下载安装 https://www.cnblogs.com/goingupeveryday/p/5699053.html
C++矩阵处理工具——Eigen https://blog.csdn.net/abcjennifer/article/details/7781936
C++开源矩阵计算工具——Eigen 在VS2005中的下载、配置与使用 https://blog.csdn.net/houjixin/article/details/8477522
Eigen库——c++开源矩阵运算库
(本人对较多介绍Eigen库的文章的总结)
一、Eigen库的配置(VS2017)
- Eigen库下载: http://eigen.tuxfamily.org/index.php?title=Main_Page
下载文件并解压:

- 新建文件名为eigen3的文件夹,并将Eigen文件夹拷贝到其中。
将eigen3文件夹移至常用路径下。本人的是:F:\Program Files\eigen3。
- 打开VS(本人用的是2017版),新建项目:新建->项目->Visual C++ -> Windows桌面->Windows控制台应用程序。
在解决方案资源管理器中,右键项目名称,选择属性。如下图。
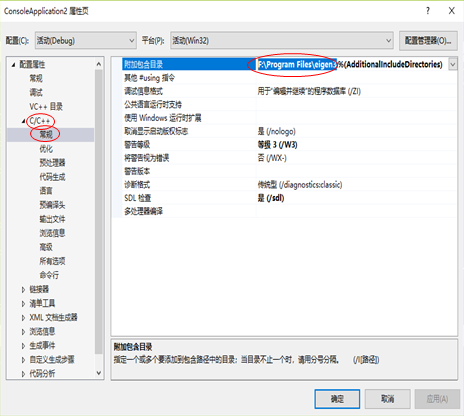
如下图添加eigen3文件夹的路径,点击应用、确定即可。
- 简单的代码验证
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen; // 改成这样亦可 using Eigen::MatrixXd;
using namespace std;
int main()
{
MatrixXd m = MatrixXd::Random(3,3); //随机生成3*3的double型矩阵
m = (m + MatrixXd::Constant(3,3,1.2)) * 50; //MatrixXd::Constant(3,3,1.2)表示生成3*3的double型矩阵,该矩阵所有元素均为1.2
cout << "m =" << endl << m << endl;
VectorXd v(3); // 定义v为3*1的double型向量
v << 1, 2, 3; // 向量赋值
cout << "m * v =" << endl << m * v << endl;
system("pause");
return 0;
}
二、Eigen库的使用
在文件头中加入
#include <Eigen/Dense>
-
矩阵&向量的定义与赋值
MatrixXd:定义任意维double矩阵。其中X表示维度,d表示double型。同理d可改为f或者i,分别表示float型、int型。
Matrix2d:定义2维double矩阵(2×2)
Matrix3d:定义3维double矩阵(3×3)VectorXd 定义任意维double向量
Vector2d 定义2维double向量(2×1)
Vector3d 定义3维double向量(3×1)具体使用:
//1、定义
MatrixXd temp1(3, 4); //定义3*4的矩阵
MatrixXd temp2(3, 3); //定义3*3的矩阵
VectorXd temp3(3, 1); //定义3维行向量
Vector3d temp4; //定义3维行向量
//2、赋值
temp1 <<1,2,3,4,
5,6,7,8,
9,0,0,0;
temp4 <<1,
1,
1;
注意:矩阵的拼接与赋值方式相同!
矩阵的索引:
cout<< temp1 (0,0) <<endl;
cout<< temp1 (0,1) <<endl;
cout<< temp1 (1,0) <<endl;
cout<< temp1 (1,1) <<endl;
//输出结果为:
1
2
5
6
特殊矩阵/向量的赋值:
Matrix3d temp1 = MatrixXd::Identity(3, 3); //定义3*3的单位阵
Matrix3d temp2 = MatrixXd::Zero(3, 3); //定义3*3的零矩阵
Matrix3d temp3 = MatrixXd::Ones(3, 3); //定义3*3的全1矩阵
Vector3d temp4 = VectorXd::Zero(3, 1); //定义3*1的零向量
Vector3d temp5 = VectorXd::Ones(3, 1); //定义3*1的全1向量
- 矩阵基本运算
常用的 “+”,“-”,“*”, “/” 与一般的C语言操作相同。
2.1 行列数
MatrixXd R(3, 3);
double row = R.rows(); //row为R矩阵的行数
double col = R.cols(); //col为R矩阵的列数
2.2 转置、逆、行列式
R.transpose(); //转置
R.inverse(); //逆
double d = R.determinant(); //行列式
2.3、叉乘
// 此处的代码未给出矩阵/向量的赋值!
Vector3d temp1(3, 1), temp2(3, 1);
temp1.cross(temp2); //temp1×temp2
2.4、svd分解
Matrix3d H;
JacobiSVD<Eigen::MatrixXd> svd(H, ComputeThinU | ComputeThinV);
Matrix3d V = svd.matrixV(), U = svd.matrixU();
Matrix3d D = U.inverse() * H * V.transpose().inverse(); // S = U^-1 * A * VT^ -1
2.5、秩
Matrix3d D;
FullPivLU<Matrix3d> lu(D);
int r = lu.rank();
cout << "By default, the rank of A is found to be " << lu.rank() << endl;
lu.setThreshold(1e-5);
cout << "With threshold 1e-5, the rank of A is found to be " << lu.rank() << endl;
2.6、矩阵子块的提取
MatrixXd temp(3, 2);
temp << 0, 1,
2, 3,
4, 5;
cout << temp.block(0,0,3,1)<<endl; //从矩阵temp(0,0)为起始点,取三行一列
cout << temp.block(0,1,3,1)<<endl; //从矩阵temp(0,1)为起始点,取三行一列
//输出结果为:
0
2
4
1
3
5
矩阵按行遍历:
MatrixXd R(3, 3);
R << 1,2,3,
4,5,6,
7,8,9;
double row = R.rows(); //row为R矩阵的行数
double col = R.cols(); //col为R矩阵的列数
for(int i=0;i<row;i++)
{
cout<<R.block(i,0,1,col)<<endl;
}
矩阵按列遍历:
for(int i=0;i<col;i++)
{
cout<<R.block(0,i,row,1)<<endl;
}
更多操作参见:http://igl.ethz.ch/projects/libigl/matlab-to-eigen.html
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/183524.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
