大家好,又见面了,我是你们的朋友全栈君。
最近在学习电机的智能控制,上周学习了基于单神经元的PID控制,这周研究基于BP神经网络的PID控制。
神经网络具有任意非线性表达能力,可以通过对系统性能的学习来实现具有最佳组合的PID控制。利用BP神经网络可以建立参数Kp,Ki,Kd自整定的PID控制器。基于BP神经网络的PID控制系统结构框图如下图所示:
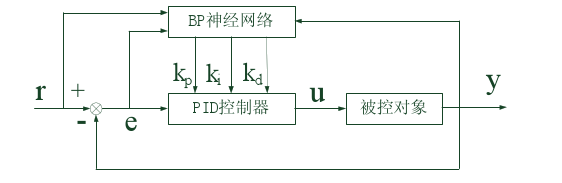

控制器由两部分组成:经典增量式PID控制器;BP神经网络
经典增量式PID控制器
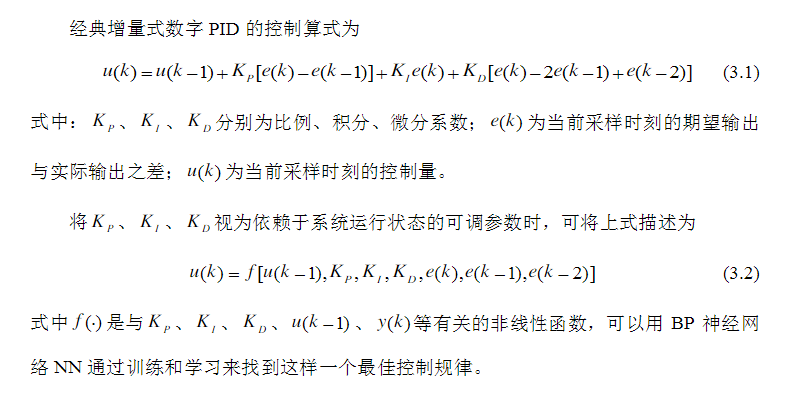
BP神经网络控制算法
BP神经网络结构如下图所示:
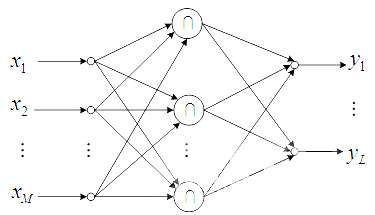
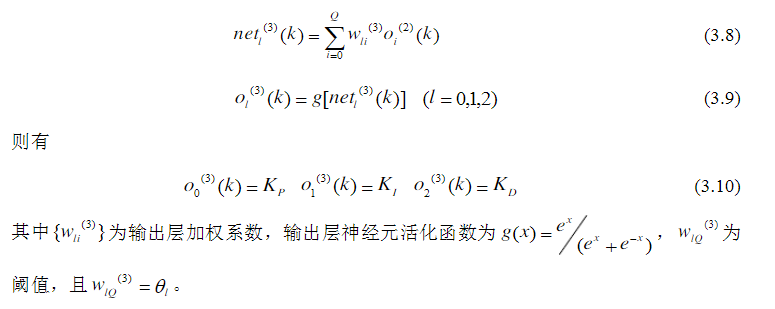
它是一种有隐含层的3层前馈网络,包括输入层、隐含层和输出层。输出层的三个输出分别对应PID控制器的三个可调参数Kp、Ki和Kd。由于Kp、Ki和Kd不能为负,所以输出层神经元的变换函数取非负的Sigmoid函数,而隐含层神经元的变换函数可取正负对称的Sigmoid函数。
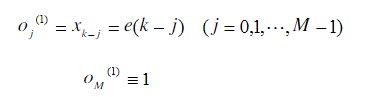
BP神经网络的输入(M为输入变量的个数):
隐含层的输入输出为:
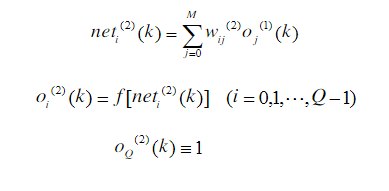

输出层的输入输出:
采用以输出误差二次方为性能指标,其性能指标函数为:

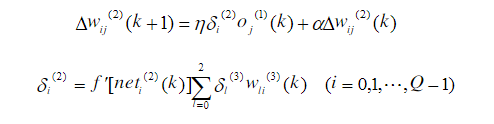
按照梯度下降法修正网络的加权系数,并附加一使搜索快速收敛全局极小的惯性项,则有BP神经网络输出层的加权系数修正公式为:

同理,可得隐含层加权系数的计算公式为:

由此,BP神经网络PID控制算法可总结为:
(1)确定BP神经网络结构,即确定输入层和隐含层的节点个数,选取各层加权系数的初值wij(0)、wli(0),选定学习速率和惯性系数,此时k=1
(2)采样给定和反馈信号,即r(k)和y(k),计算误差e(k)=r(k)-y(k)
(3)确定输入量
(4)根据上述公式,计算各层神经元的输入、输出,神经网络输出层即为PID控制器的三个可调参数Kp、Ki和Kd
(5)由增量式PID控制公式,计算PID控制器的控制输出u(k)
(6)进行神经网络学习,实时自动调整输出层和隐含层的加权系数wli(k)和wij(k),实现PID控制参数的自适应调整
(7)置k=k+1,返回步骤(2)
Matlab Simulink仿真建模
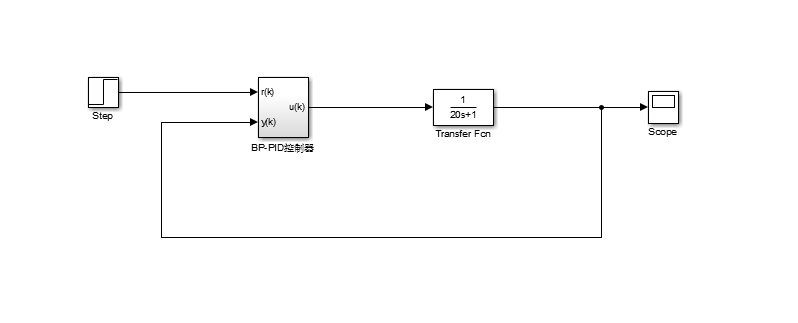
输入为阶跃信号,其参数为默认值,一个简单的闭环控制系统。BP神经网络PID控制器的内部结构如下图所示:
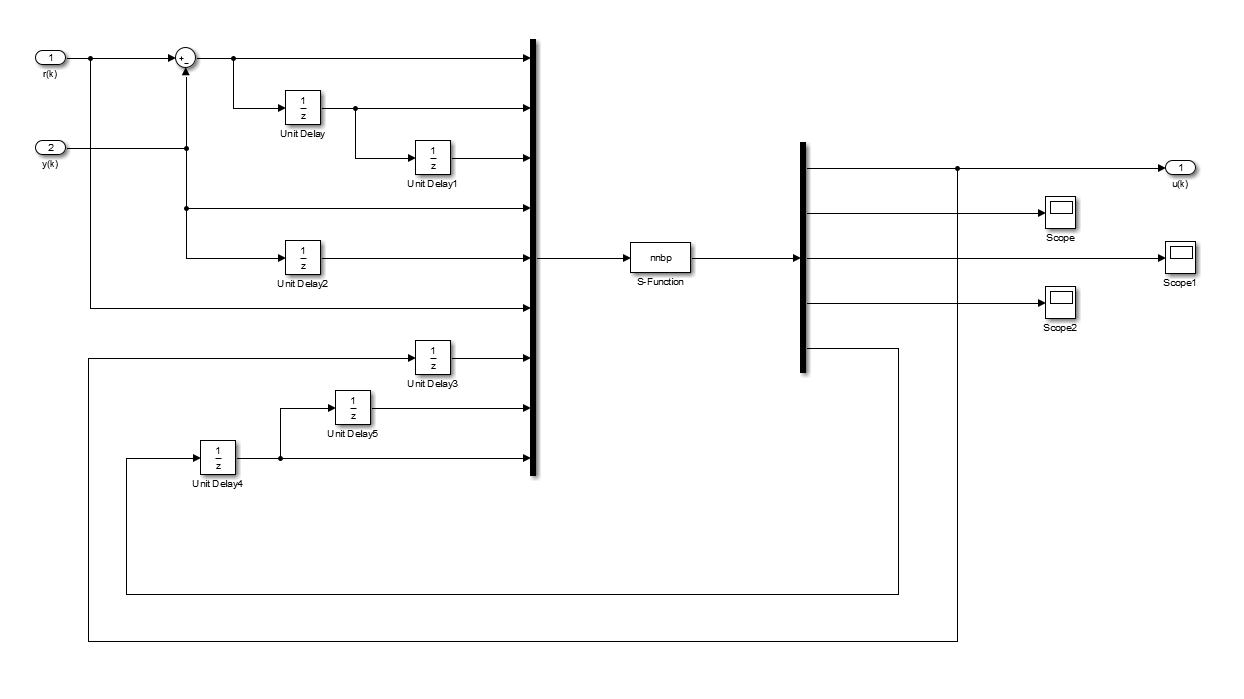
S-function的输入为:u=[e(k);e(k-1);e(k-2);y(k);y(k-1);r(k);u(k-1);隐含层+输出层权值系数(k-2);隐含层+输出层权值系数(k-1)]=
[u(1);u(2);u(3);u(4);u(5);u(6);u(7);…u(隐含层权值个数+输出层权值个数)],把所有的权值系数从输出再返回到输入是为了更新权值矩阵,从而自适应的调整PID三个参数。关于S-function的使用方法,请参考我写的另一篇博客: https://blog.csdn.net/weixin_42650162/article/details/90488610
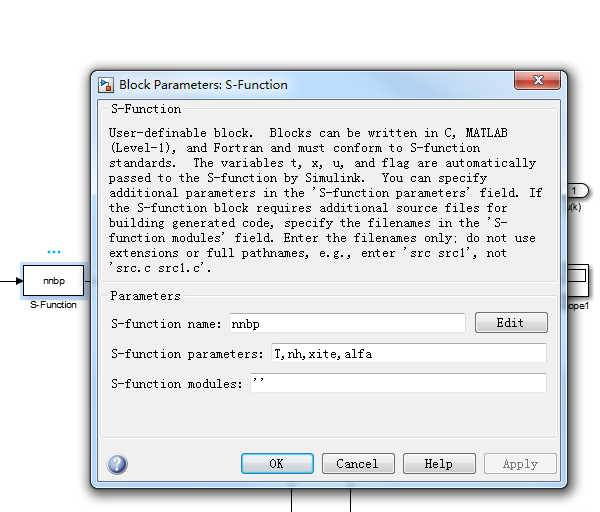
S-function函数
下面是S-function函数编写的控制算法:
为了更好的理解下面的程序代码,先要理解Matlab中的几个函数
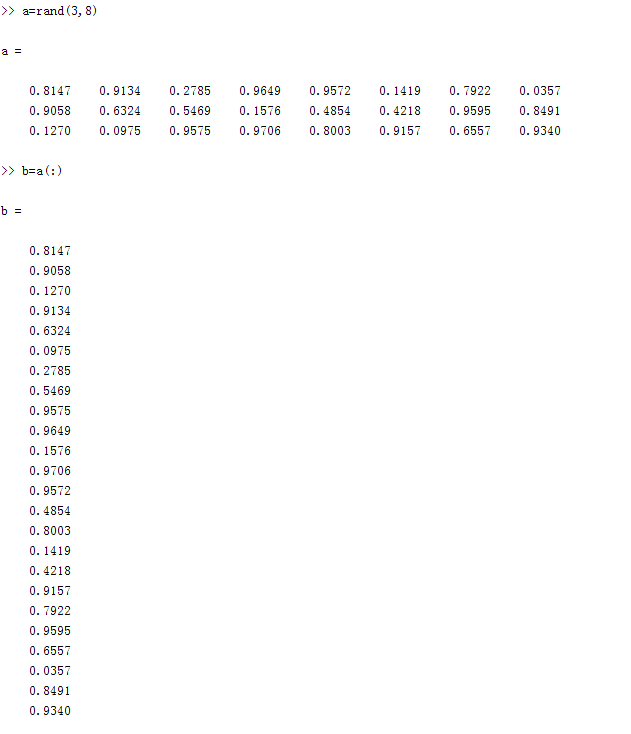
通过(:)把一个矩阵变为一个列向量
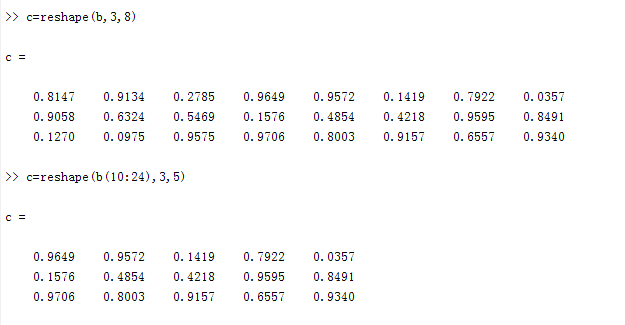
通过reshape函数,从列向量里任意组成矩阵如c=reshape(b,3,8),b中元素按顺序排成一个3*8的矩阵,也就是还原了矩阵a,
c=reshape(b(10:24),3,5),b中第10个元素到第24个元素,按顺序排成一个3*5的矩阵。
在我编写的S-function函数中,就是通过reshape函数,把输入的隐含层+输出层的列权值系数还原成:隐含层权值系数矩阵+输出层权值系数矩阵,通过算法完成这两个权值系数矩阵的更新。
下面是M文件编写的S-function控制算法:
function [sys,x0,str,ts,simStateCompliance] = nnbp(t,x,u,flag,T,nh,xite,alfa)
switch flag,
case 0,
[sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes(T,nh);
%初始化函数
case 3,
sys=mdlOutputs(t,x,u,nh,xite,alfa);
%输出函数
case {1,2,4,9},
sys=[];
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes(T,nh)
%调用初始画函数,两个外部输入参数 参数T确定采样时间,参数nh确定隐含层层数
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 4+6*nh;
%定义输出变量,包括控制变量u,三个PID参数:Kp,Ki,Kd,隐含层+输出层所有加权系数
sizes.NumInputs = 7+12*nh;
%定义输入变量,包括前7个参数[e(k);e(k-1);e(k-2);y(k);y(k-1);r(k);u(k-1)]
%隐含层+输出层权值系数(k-2),隐含层+输出层权值系数(k-1)
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [T 0];
simStateCompliance = 'UnknownSimState';
function sys=mdlOutputs(t,x,u,nh,xite,alfa)
%调用输出函数
wi_2 = reshape(u(8:7+3*nh),nh,3);
%隐含层(k-2)权值系数矩阵,维数nh*3
wo_2 = reshape(u(8+3*nh:7+6*nh),3,nh);
%输出层(k-2)权值系数矩阵,维数3*nh
wi_1 = reshape(u(8+6*nh:7+9*nh),nh,3);
%隐含层(k-1)权值系数矩阵,维数nh*3
wo_1 = reshape(u(8+9*nh:7+12*nh),3,nh);
%输出层(k-1)权值系数矩阵,维数3*nh
xi = [u(6),u(4),u(1)];
%神经网络的输入xi=[u(6),u(4),u(1)]=[r(k),y(k),e(k)]
xx = [u(1)-u(2);u(1);u(1)+u(3)-2*u(2)];
%xx=[u(1)-u(2);u(1);u(1)+u(3)-2*u(2)]=[e(k)-e(k-1);e(k);e(k)+e(k-2)-2*e(k-1)]
I = xi*wi_1';
%计算隐含层的输入,I=神经网络的输入*隐含层权值系数矩阵的转置wi_1',结果为:
%I=[net0(k),net1(k)...netnh(k)]为1*nh矩阵
Oh = exp(I)./(exp(I)+exp(-I));
%激活函数,可更改
%计算隐含层的输出,(exp(I)-exp(-I))./(exp(I)+exp(-I))为隐含层的激活函数Sigmoid
%Oh=[o0(k),o1(k)...onh(k)],为1*nh的矩阵
O = wo_1*Oh';
%计算输出层的输入,维数3*1
K = 2./(exp(O)+exp(-O)).^2;
%激活函数,可更改
%计算输出层的输出K=[Kp,Ki,Kd],维数为1*3
%exp(Oh)./(exp(Oh)+exp(-Oh))为输出层的激活函数Sigmoid
uu = u(7)+K'*xx;
%根据增量式PID控制算法计算控制变量u(k)
dyu = sign((u(4)-u(5))/(uu-u(7)+0.0000001));
%计算输出层加权系数修正公式的sgn
%sign((y(k)-y(k-1))/(u(k)-u(k-1)+0.0000001)近似代表偏导
dK = 2./(exp(K)+exp(-K)).^2;
%激活函数,可更改
delta3 = u(1)*dyu*xx.*dK;
wo = wo_1+xite*delta3*Oh+alfa*(wo_1-wo_2);
%输出层加权系数矩阵的修正
dOh = 2./(exp(Oh)+exp(-Oh)).^2;
%激活函数,可更改
wi = wi_1+xite*(dOh.*(delta3'*wo))'*xi+alfa*(wi_1-wi_2);
%隐含层加权系数修正
sys = [uu;K(:);wi(:);wo(:)];
%输出层输出sys=[uu;K(:);wi(:);wo(:)]=
%[uu;Kp;Ki;Kd;隐含层+输出层所有权值系数]
%K(:),wi(:),wo(:),把这三个矩阵按顺序排为列向量本函数有四个外部输入变量:T,nh,xite,alfa T输入采样时间,nh确定隐含层层数,xite和alfa权值系数修正公式里的学习速率和惯性系数。
为了更好地分配S-function的输出,需要对Demux进行如下设置:
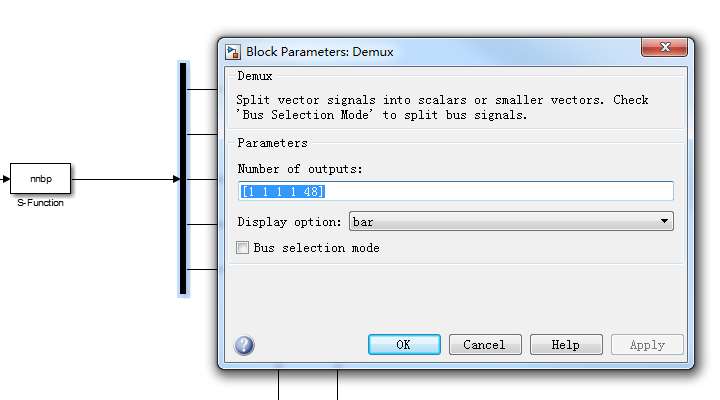
确保前三个输出变量为:控制变量u,Kp,Ki,Kd,剩下的变量为隐含层权值系数矩阵+输出层权值系数矩阵总数之和。
然后对此S-function函数进行封装:
具体过程可以参考我的另一篇博客:
https://blog.csdn.net/weixin_42650162/article/details/90488610
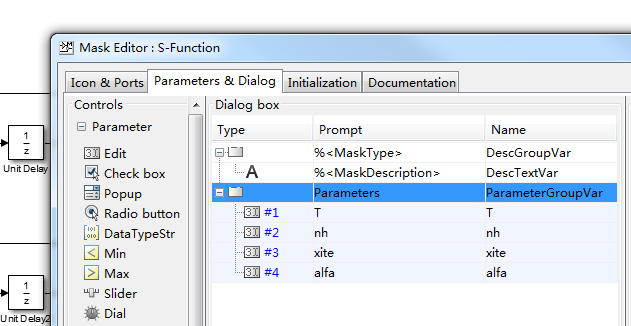
完成后点击S-function函数,会弹出外部参数设置框,设置参数如下:
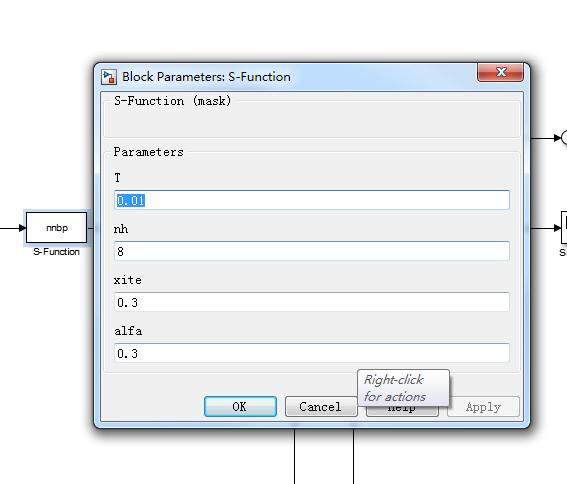
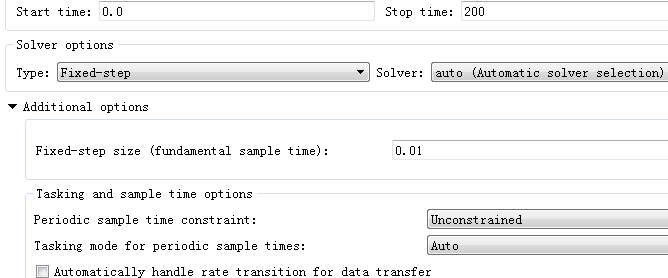
注:T采样时间要和设置的控制算法的采样时间一样,不然会报错,如下:
下面是仿真结果:
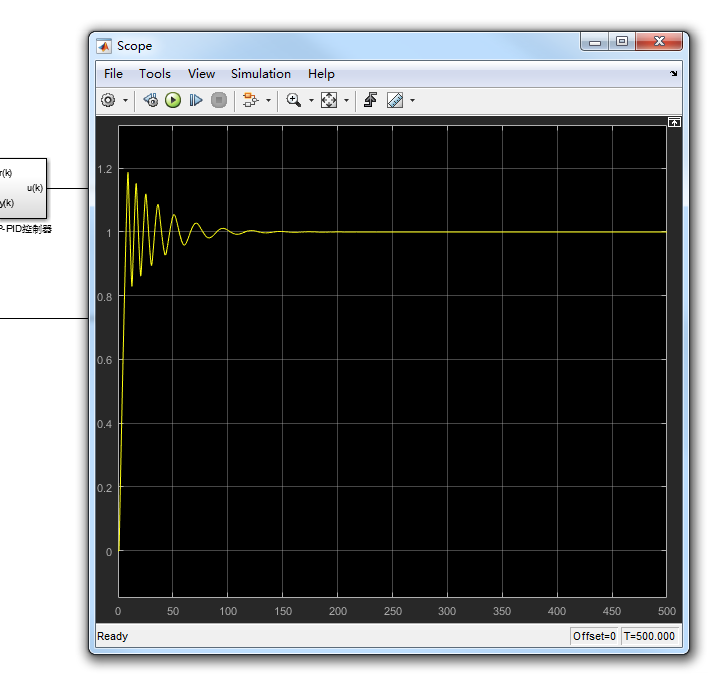
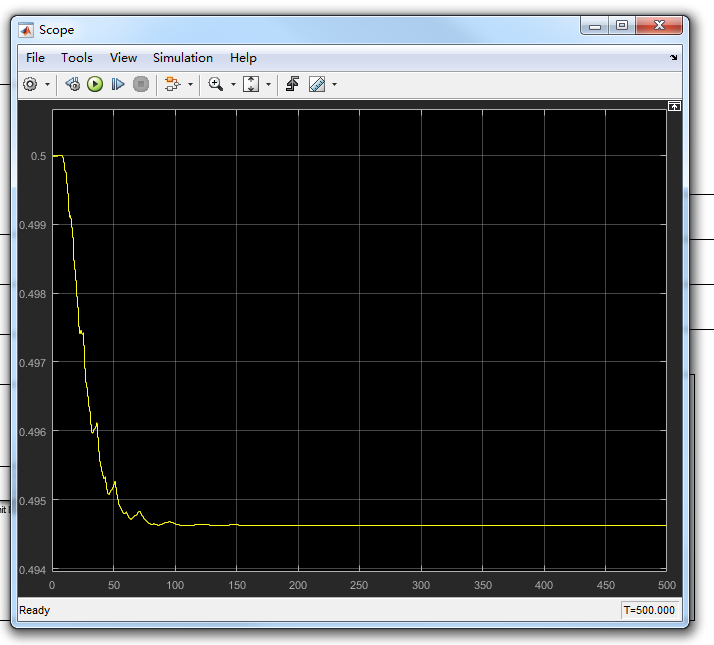
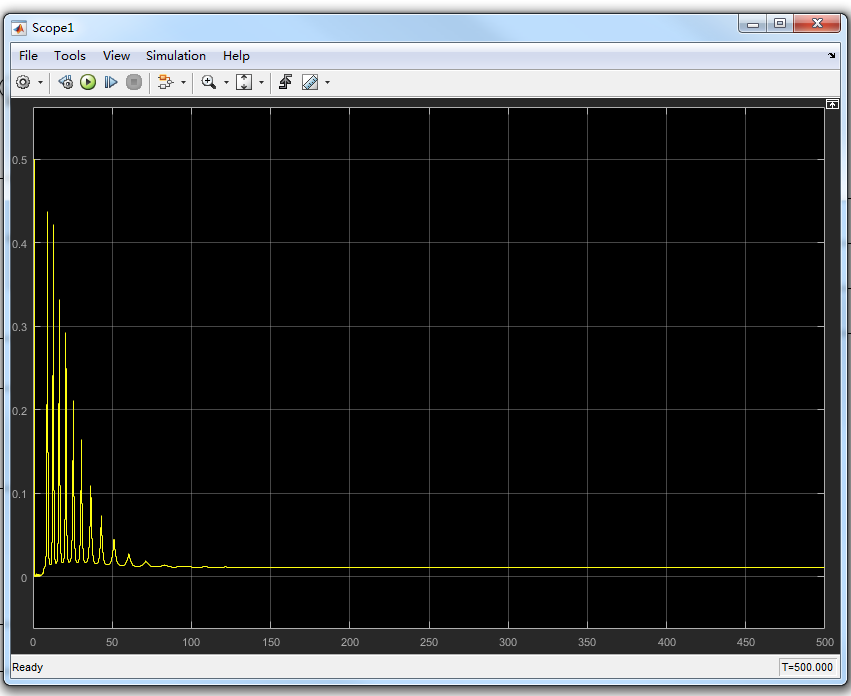
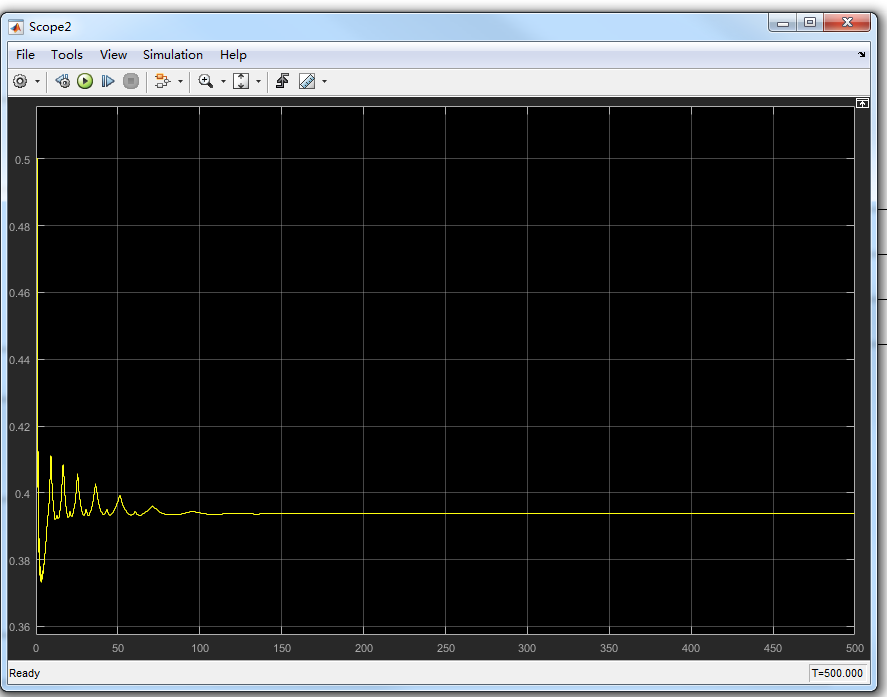
Kp、Ki、Kd的自适应变化曲线:
Kp:
Ki:
Kd:
有关仿真的所有资源已上传,如有需要可自行下载:
https://download.csdn.net/download/weixin_42650162/11216367
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/138789.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
