大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
Tof,结构光,三角测距,RGBD,双目,激光雷达,毫米波雷达一文总结
最近在做一些无人车相关的工作,对其中的一些基础技术做了些总结和归纳,主要涉及以下技术,将会分两篇文章进行介绍
- 超声波测距
- 毫米波雷达
- 激光雷达
- 固态雷达
- RGBD摄像头
- 双目摄像头
- 单目摄像头
- TOF 飞行时间
- 三角测距
- 结构光
虽然这些词汇一起出现的频率很高,但事实上之前在用的时候经常并不能确定某个方案所使用的技术细节究竟是什么样的,例如,扫地机器人究竟用了那个雷达,而这个雷达又用了什么技术。
首先,不加验证的给出一个经验结论(不保证全场景正确),目前我们使用的任何与定位或者避障方案都无可避免的使用了波。扩展一点来说,我们想观察一个实体实物,如果不准接触(甚至接触的也得用,脑电,心电),那似乎也只有波能满足我们的需求了主动的或者被动的,主动的就是设备主动发出波,并接受反馈回来的波,进行分析(时间,图案,相位,携带信息…)从而得出探测信息或者相对位置信息。被动的就是自己不发射波,但接受自然界本来有的波(相机),来获取相关信息。
距离测量算法解析
我们无论是要避障,还是定位,都离不开获取测量被测物体与测量装置之间的相对位置关系,而根据被测物体的任意点的相对位置关系,我们可以获得被测物体的整体位置信息甚至组成三维结构。那么一般常用的测距方式有哪些呢?
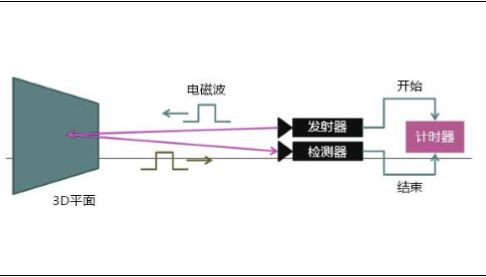
TOF 飞行时间测距法
这是最近比较热门的一个词,看字面意思也大概能理解其最重要的原理,就是波飞行时间喽,根据初中物理知识,由于能检测波的速度是确定的,所以我们可以很容易的根据这个时间确定物体距离。目前使用这种方案测量的设备不在少数,而根据所使用的的波不同(种类不同或者波长不同),即可有超声波,毫米波雷达,激光雷达等等不同的实现手段。

超声波
超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2 。

| 技术关键点 | 典型值(技术细节不同,值范围可能会较大) |
|---|---|
| 探测距离 | 10米或100米,大部分实现在10米以内 |
| 精度 | 厘米级,分辨力极低,几十度 |
| 成本 | 极低,百元以内 |
| 缺陷 | 反射面是平面(适用场景少) |
| 缺陷 | 速度慢,声波速度340 m/s |
| 缺陷 | 对灰尘等环境适应性差 |
毫米波雷达
毫米波雷达指工作在毫米波波段的雷达。通常毫米波是指30~300GHz频域(波长为1~10mm)的电磁波,毫米波雷达分为远距离雷达(LRR)和近距离雷达(SRR),由于毫米波在大气中衰减弱,所以可以探测感知到更远的距离,其中远距离雷达可以实现超过200m的感知与探测。毫米波雷达的多项优势,使其目前在汽车防撞传感器中占比较大。目前市场主流使用的车载毫米波雷达按照其频率的不同,主要可分为两种:24GHz毫米波雷达和77GHz毫米波雷达。通常24GHz雷达检测范围为中短距离,用作实现BSD(BlindSpotDectection,盲点探测系统),而77GHz长程雷达用作实现ACC(AdaptiveCruiseControl,自适应巡航系统)。
毫米波在雷达中应用的主要限制有:雨、雾和湿雪等高潮湿环境的衰减,以及大功率器件和插损的影响降低了毫米波雷达的探测距离;树丛穿透能力差,相比微波,对密树丛穿透力低;元器件成本高,加工精度相对要求高。

| 技术关键点 | 典型值(技术细节不同,值范围可能会较大) |
|---|---|
| 探测距离 | 最大200米,典型10米左右 |
| 频段 | 24GHZ(民用);60GHZ;77GHZ(车用) |
| 精度 | 厘米级 |
| 成本 | 低,千元或更低 |
| 优势 | 不受光线尘埃影响 |
| 缺陷 | 传播耗损较大,易被人体等吸收 |
| 缺陷 | 分辨率不高,3度以上 |
激光雷达
激光雷达是目前无人驾驶中最重要的传感器,原理是激光器发射一个激光脉冲,并由计时器记录下出射的时间,回返光经接收器接收,并由计时器记录下回返的时间。两个时间相减即得到了光的“飞行时间”,而光速是一定的,因此在已知速度和时间后很容易就可以计算出距离。
在TOF方案中,距离测量依赖于时间的测量。但是光速太快了,因此要获得精确的距离,对计时系统的要求也就变得很高。一个数据是,激光雷达要测量1cm的距离,对应的时间跨度约为65ps,导致激光雷达的价格较高。
激光雷达的另一个重要的指标是线数。按线数分类的话有常见的有单线,4线,16线,32线,64线等
单束激光发射器在激光雷达内部进行匀速的旋转,每旋转一个小角度即发射一次激光,轮巡一定的角度后,就生成了一帧完整的数据。因此,单线激光雷达的数据可以看做是同一高度的一排点阵。
单线激光雷达的数据缺少一个维度,只能描述线状信息,无法描述面。也就无法得到物体垂直于激光雷达发射平面的高度信息。
多线雷达是目前自动驾驶最主要使用的雷达,但售价极高,一个64线的激光雷达售价高达几万美元。
另外,目前低成本单线激光雷达(淘宝上几百块到几千块的)的并不是基于Tof方案,而是采用了三角测距方案。

| 技术关键点 | 典型值(技术细节不同,值范围可能会较大) |
|---|---|
| 探测距离 | 200米 |
| 频段 | 3.846×10^14 Hz到7.895×10^14 Hz |
| 精度 | 毫米(近距离)-厘米级 |
| 成本 | 高,价格根据线数不等 16线国产 2.8万 国外4.0万 |
| 优势 | 精准,分辨率高,速度快 |
| 缺陷 | 阴雨天,浓雾等天气无法工作 |
后续内容请关注第二篇文章
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/193366.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
