大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
aim:
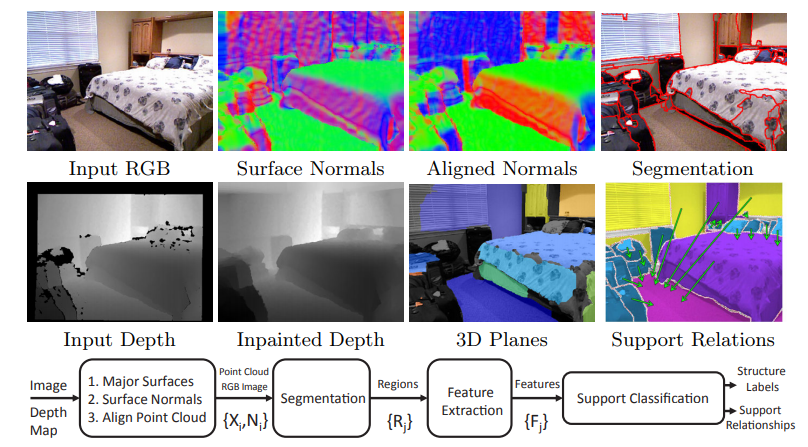
In this paper, our goal is to provide such a physical scene parse: to segment visible regions into surfaces and objects and to infer their support relations. In particular, we are interested in indoor scenes that reflect typical living conditions.
difficulties:
prevalence of small objects, and heavy occlusion, which are all compounded by the mess and disorder that are common in lived-in rooms.
advantages:
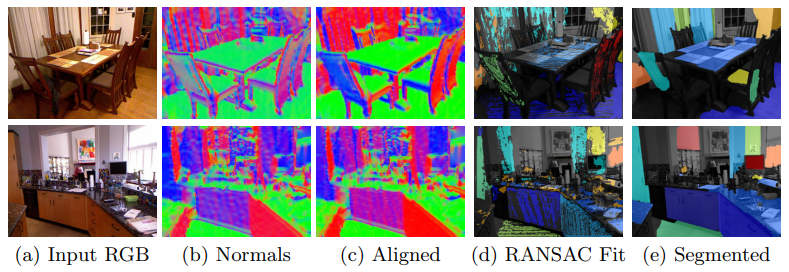
large planar surfaces, such as floor, walls, and table tops, and objects can often be interpreted in relation to those surfaces. estimating the floor orientation or finding large planar surfaces are much easier with depth information.


key technology:
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/192276.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
