大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
1.PID.py
# PID控制一阶惯性系统测试程序
#*****************************************************************#
# 增量式PID系统 #
#*****************************************************************#
class IncrementalPID:
def __init__(self, P, I, D):
self.Kp = P
self.Ki = I
self.Kd = D
self.PIDOutput = 0.0 #PID控制器输出
self.SystemOutput = 0.0 #系统输出值
self.LastSystemOutput = 0.0 #上次系统输出值
self.Error = 0.0 #输出值与输入值的偏差
self.LastError = 0.0
self.LastLastError = 0.0
#设置PID控制器参数
def SetStepSignal(self,StepSignal):
self.Error = StepSignal - self.SystemOutput
IncrementValue = self.Kp * (self.Error - self.LastError) + self.Ki * self.Error + self.Kd * (self.Error - 2 * self.LastError + self.LastLastError)
self.PIDOutput += IncrementValue
self.LastLastError = self.LastError
self.LastError = self.Error
#设置一阶惯性环节系统 其中InertiaTime为惯性时间常数
def SetInertiaTime(self,InertiaTime,SampleTime):
self.SystemOutput = (InertiaTime * self.LastSystemOutput + SampleTime * self.PIDOutput) / (SampleTime + InertiaTime)
self.LastSystemOutput = self.SystemOutput
# *****************************************************************#
# 位置式PID系统 #
# *****************************************************************#
class PositionalPID:
def __init__(self, P, I, D):
self.Kp = P
self.Ki = I
self.Kd = D
self.SystemOutput = 0.0
self.ResultValueBack = 0.0
self.PidOutput = 0.0
self.PIDErrADD = 0.0
self.ErrBack = 0.0
def SetInertiaTime(self, InertiaTime,SampleTime):
self.SystemOutput = (InertiaTime * self.ResultValueBack + SampleTime * self.PidOutput) / (SampleTime + InertiaTime)
self.ResultValueBack = self.SystemOutput
def SetStepSignal(self,StepSignal):
Err = StepSignal - self.SystemOutput
KpWork = self.Kp * Err
KiWork = self.Ki * self.PIDErrADD
KdWork = self.Kd * (Err - self.ErrBack)
self.PidOutput = KpWork + KiWork + KdWork
self.PIDErrADD += Err
self.ErrBack = Err
2.TestPID.py
import PID
import matplotlib.pyplot as plt
plt.figure(1) # 创建图表1
plt.figure(2) # 创建图表2
#测试PID程序
def TestPID(P, I, D):
IncrementalPid = PID.IncrementalPID(P, I, D)
PositionalPid = PID.PositionalPID(P, I, D)
IncrementalXaxis = [0]
IncrementalYaxis = [0]
PositionalXaxis = [0]
PositionalYaxis = [0]
for i in range(1, 500):
#增量式
IncrementalPid.SetStepSignal(100.2)
IncrementalPid.SetInertiaTime(3,0.1)
IncrementalYaxis.append(IncrementalPid.SystemOutput)
IncrementalXaxis.append(i)
#位置式
PositionalPid.SetStepSignal(100.2)
PositionalPid.SetInertiaTime(3,0.1)
PositionalYaxis.append(PositionalPid.SystemOutput)
PositionalXaxis.append(i)
plt.figure(1) # 选择图表1
plt.plot(IncrementalXaxis, IncrementalYaxis,'r')
plt.xlim(0,120)
plt.ylim(0,140)
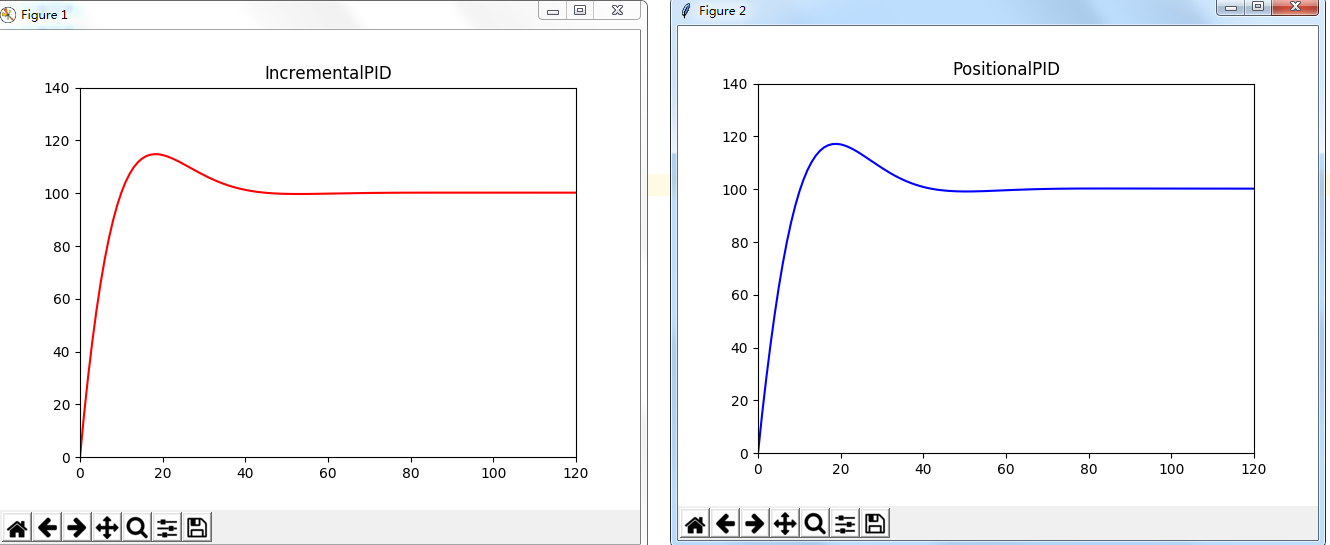
plt.title("IncrementalPID")
plt.figure(2) # 选择图表2
plt.plot(PositionalXaxis, PositionalYaxis, 'b')
plt.xlim(0,120)
plt.ylim(0,140)
plt.title("PositionalPID")
plt.show()
if __name__ == "__main__":
TestPID(4.5,0.5,0.1)
3.实现效果

版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/186017.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
