大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
参考:
一、匈牙利算法基本概念
- 匈牙利算法(Hungarian algorithm),即图论中寻找最大匹配的算法,暂不考虑加权的最大匹配(用KM算法实现)。
- 匈牙利算法(Hungarian algorithm),主要用于解决一些与二分图匹配有关的问题。
1. 二分图
- 二分图是图论中的一种特殊模型。若能将无向图G=(V,E)的顶点V划分为两个交集为空的顶点集,并且任意边的两个端点都分属于两个集合,则称图G为一个为二分图。
- 二分图(Bipartite graph)是一类特殊的图,它可以被划分为两个部分,每个部分内的点互不相连。下图是典型的二分图。
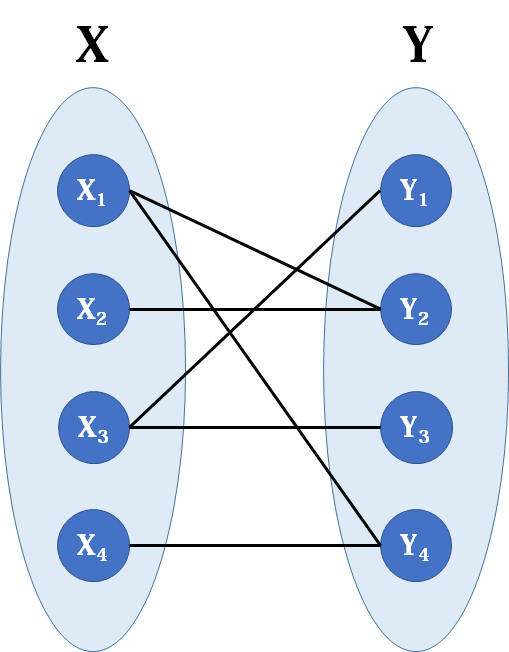

可以看到,在上面的二分图中,每条边的端点都分别处于点集X和Y中。
2. 匹配
- 图G的一个匹配是由一组没有公共端点的不是圈的边构成的集合。
这里,我们用一个图来表示下匹配的概念:
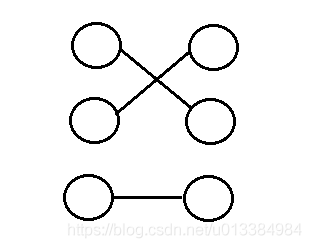
如图所示,其中的三条边即该图的一个匹配。所以,匹配的两个重点:1. 匹配是边的集合;2. 在该集合中,任意两条边不能有共同的顶点。
那么,我们自然而然就会有一个想法,一个图会有多少匹配?有没有最大的匹配(即边最多的匹配呢)?
3. 最大匹配
- 选择这样的边数最大的子集称为图的最大匹配问题。最大匹配的边数称为最大匹配。
4. 完美匹配
- 如果一个匹配中,图中的每个顶点都和图中某条边相关联,则称此匹配为完美匹配(完全匹配),也称作完备匹配。
- 考虑部集为X={x1 ,x2, …}和Y={y1, y2, …}的二分图,一个完美匹配就是定义从X-Y的一个双射,依次为x1, x2, … xn找到配对的顶点,最后能够得到 n!个完美匹配。
5. 最优匹配
- 最优匹配又称为带权最大匹配,是指在带有权值边的二分图中,求一个匹配使得匹配边上的权值和最大。
- 一般X和Y集合顶点个数相同,最优匹配也是一个完备匹配,即每个顶点都被匹配。如果个数不相等,可以通过补点加0边实现转化。一般使用KM算法解决该问题。
6. 最小覆盖
-
二分图的最小覆盖分为最小顶点覆盖和最小路径覆盖:
①最小顶点覆盖是指最少的顶点数使得二分图G中的每条边都至少与其中一个点相关联,二分图的最小顶点覆盖数=二分图的最大匹配数;
②最小路径覆盖也称为最小边覆盖,是指用尽量少的不相交简单路径覆盖二分图中的所有顶点。二分图的最小路径覆盖数=|V|-二分图的最大匹配数;
7. 最大独立集
- 最大独立集是指寻找一个点集,使得其中任意两点在图中无对应边。对于一般图来说,最大独立集是一个NP完全问题,对于二分图来说:最大独立集=|V|-二分图的最大匹配数。
8. 交替路
- 从未匹配点出发,依次经过未匹配的边和已匹配的边,即为交替路,如Fig.3:3 -> 5 -> 1 -> 7 -> 4 -> 8

9. 增广路(也称增广轨或交错轨)
-
如果交替路经过除出发点外的另一个未匹配点,则这条交替路称为增广路,如交替路概念的例子,其途径点8,即为增广路。
-
由增广路的定义推出下面三个结论(设P为一条增广路):
1). P的路径长度一定为奇数,第一条边和最后一条边都是未匹配的边(根据要途经已匹配的边和要经过另一个未匹配点,这个结论可以理解成第一个点和最后一个点都是未匹配点,可以在Fig.3上的增广路观察到)2).对增广路径编号,所有奇数的边都不在M中,偶数边在M中。
3). P经过取反操作可以得到一个更大的匹配图,比原来匹配多一个(取反操作即,未匹配的边变成匹配的边,匹配的边变成未匹配的边,这个结论根据结论1).和交替路概念可得该结论)
4). 当且仅当不存在关于图M的增广路径,则图M为最大匹配。所以匈牙利算法的思路就是:不停找增广路,并增加匹配的个数。
二、匈牙利算法概述
- 匈牙利算法主要用来解决两个问题:求二分图的最大匹配数和最小点覆盖数。
1. 最大匹配问题
- 看完上面讲的,相信读者会觉得云里雾里的:这是啥?这有啥用?所以我们把这张二分图稍微做点手脚,变成下面这样:
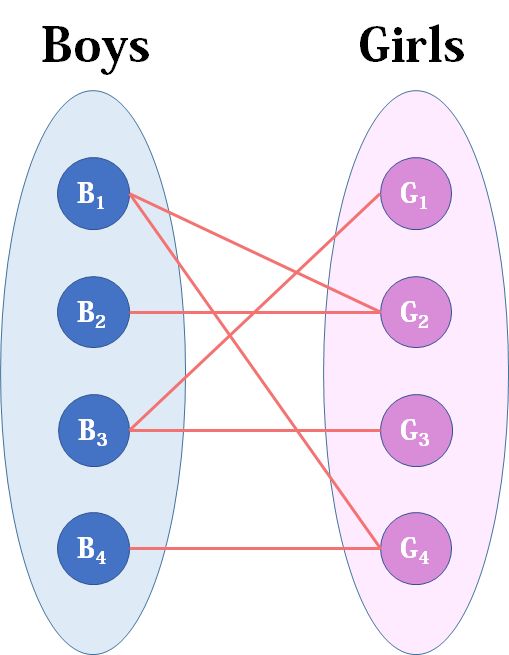
现在Boys和Girls分别是两个点集,里面的点分别是男生和女生,边表示他们之间存在“暧昧关系”。 - 最大匹配问题相当于,假如你是红娘,可以撮合任何一对有暧昧关系的男女,那么你最多能成全多少对情侣?(数学表述:在二分图中最多能找到多少条没有公共端点的边)
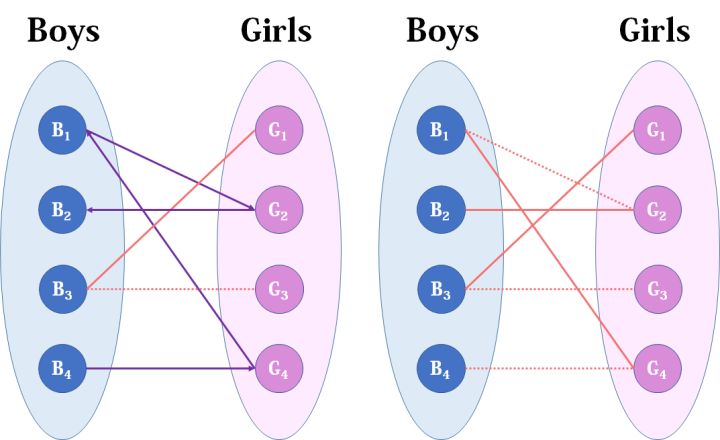
- 现在我们来看看匈牙利算法是怎么运作的:
- 我们从B1看起(男女平等,从女生这边看起也是可以的),他与G2有暧昧,那我们就先暂时把他与G2连接(注意这时只是你作为一个红娘在纸上构想,你没有真正行动,此时的安排都是暂时的)。
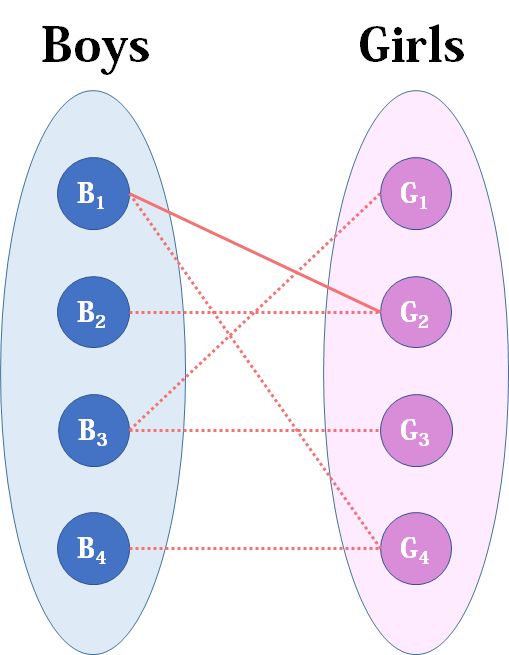
- 来看B2,B2也喜欢G2,这时G2已经“名花有主”了(虽然只是我们设想的),那怎么办呢?我们倒回去看G2目前被安排的男友,是B1,B1有没有别的选项呢?有,G4,G4还没有被安排,那我们就给B1安排上G4。
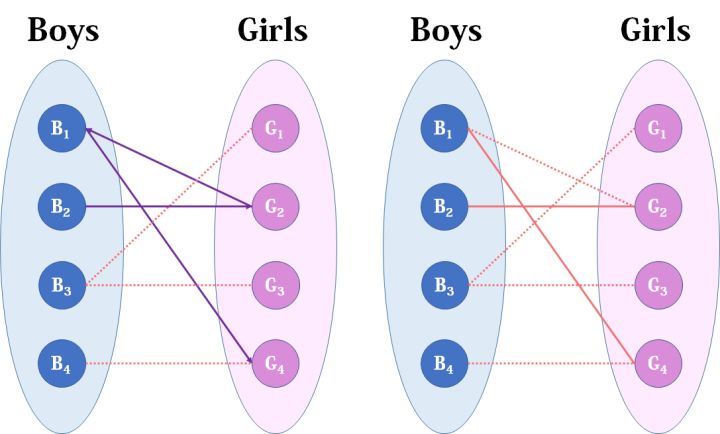
- 然后B3,B3直接配上G1就好了,这没什么问题。至于B4,他只钟情于G4,G4目前配的是B1。B1除了G4还可以选G2,但是呢,如果B1选了G2,G2的原配B2就没得选了。我们绕了一大圈,发现B4只能注定单身了,可怜。(其实从来没被考虑过的G3更可怜)
- 我们从B1看起(男女平等,从女生这边看起也是可以的),他与G2有暧昧,那我们就先暂时把他与G2连接(注意这时只是你作为一个红娘在纸上构想,你没有真正行动,此时的安排都是暂时的)。
- 这就是匈牙利算法的流程,至于具体实现,我们来看看代码:
int M, N; //M, N分别表示左、右侧集合的元素数量
int Map[MAXM][MAXN]; //邻接矩阵存图
int p[MAXN]; //记录当前右侧元素所对应的左侧元素
bool vis[MAXN]; //记录右侧元素是否已被访问过
bool match(int i)
{
for (int j = 1; j <= N; ++j)
if (Map[i][j] && !vis[j]) //有边且未访问
{
vis[j] = true; //记录状态为访问过
if (p[j] == 0 || match(p[j])) //如果暂无匹配,或者原来匹配的左侧元素可以找到新的匹配
{
p[j] = i; //当前左侧元素成为当前右侧元素的新匹配
return true; //返回匹配成功
}
}
return false; //循环结束,仍未找到匹配,返回匹配失败
}
int Hungarian()
{
int cnt = 0;
for (int i = 1; i <= M; ++i)
{
memset(vis, 0, sizeof(vis)); //重置vis数组
if (match(i))
cnt++;
}
return cnt;
}
其实流程跟我们上面描述的是一致的。注意这里使用了一个递归的技巧,我们不断往下递归,尝试寻找合适的匹配。
- 注意:完美匹配一定是最大匹配,而最大匹配不一定是完美匹配。
2. 最小点覆盖问题
- 另外一个关于二分图的问题是求最小点覆盖:我们想找到最少的一些点,使二分图所有的边都至少有一个端点在这些点之中。倒过来说就是,删除包含这些点的边,可以删掉所有边。
这为什么用匈牙利算法可以解决呢?你如果以为我要长篇大论很久就错了,我们只需要一个定理:
一个二分图中的最大匹配数等于这个图中的最小点覆盖数。
三、匈牙利算法核心
-
匈牙利算法的核心就是不停的寻找增广路径来扩充匹配集合M。
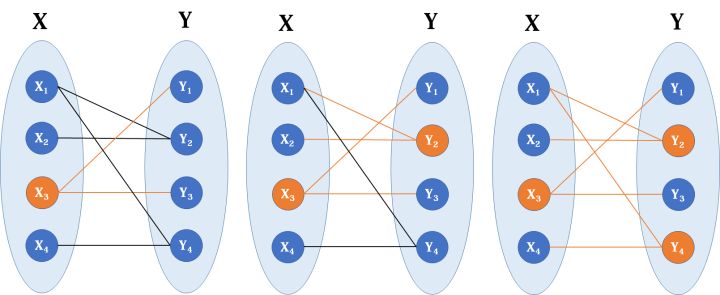
我们给出实例来理解。
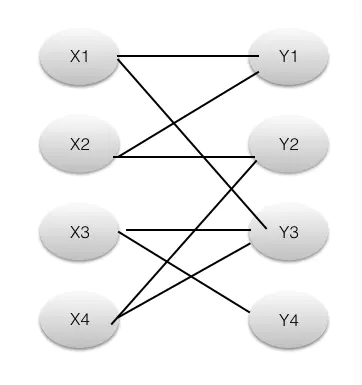
我们寻找如上图的最大匹配。(1)首先M集合为空(即没有边在里面),然后开始从X1寻找增广路,遵循上述原则我们只能在Yi中找,找到Y1,(X1,Y1 )这条路径,满足条件,取反,将(X1,Y1 )这条路径加入到M中。

(2)接着,我们找到X2点。遵循原则,找到Y1,Y1不是未覆盖点,这个时候我们有两种选择,一个是深度搜索,一个是广度搜索,我们采用深度优先,虽然Y1不是未覆盖点,(X2,Y1)不是增广路,但是Y1连着X1,X1又和Y3相连,我们考虑( X2,Y1,X1,Y3 )这条路径,奇数?左右交替?起终点未覆盖?奇路径不属于M偶路径属于?满足所有增广路条件,所以这是一条增广路径,然后取反,得到如下图。
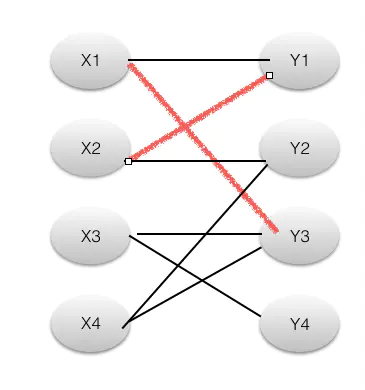
(3)现在M集合中的路径有两条了,由于我们找到了增广路径,使得M中的边数量增加。所以增广路径是匈牙利算法的核心,每找到一条增广路径,意味这M集合中边的数量就会增加1,当找不到增广路径的时候,这个时候M中边的数量就是我们二部图的最大匹配数量。我们是怎样找到这条路径的呢,从X2开始寻找,我们先找到Y1,Y1不是未覆盖点,我们考虑Y1的原有匹配点X1,从X1开始寻找增广路,找到了Y3,当X1有增广路的时候,那么加上(X1,Y1)(X2,Y1)这两条路经,依然满足增广路条件。
所以基于我们上面的理解可以给出寻找增广路的伪代码:
while(找到Xi的关联顶点Yj){
if(顶点Yj不在增广路径上){
将Yj加入增广路
if(Yj是未覆盖点或者Yj的原匹配点Xk能找到增广路径){
//扩充集合M
将Yj的匹配点改为Xi;
返回true
}
}
返回false
}
从X2开始寻找是基于深度优先的,如果是基于广度优先呢?那么X2就会找到Y2。
四、匈牙利算法实现
- 深度优先匈牙利算法C语言代码:
typedef struct tagMaxMatch{
int edge[COUNT][COUNT];
bool on_path[COUNT];
int path[COUNT];
int max_match;
}GRAPH_MATCH;
void outputRes(int *path){
for (int i = 0 ; i<COUNT; i++) {
printf("%d****%d\n",i,*(path+i)); //Yj在前 Xi在后
}
}
void clearOnPathSign(GRAPH_MATCH *match){
for (int j = 0 ; j < COUNT ; j++) {
match->on_path[j] = false;
}
}
//dfs算法
bool FindAugPath(GRAPH_MATCH *match , int xi){
for (int yj = 0 ; yj < COUNT; yj++) {
if ( match->edge[xi][yj] == 1 && !match->on_path[yj]) {
//如果yi和xi相连且yi没有在已经存在的增广路经上
match->on_path[yj] = true;
if (match->path[yj] == -1 || FindAugPath(match,match->path[yj])) {
// 如果是yi是一个未覆盖点或者和yi相连的xk点能找到增广路经,
match->path[yj] = xi; //yj点加入路径;
return true;
}
}
}
return false;
}
void Hungary_match(GRAPH_MATCH *match){
for (int xi = 0; xi<COUNT ; xi++) {
FindAugPath(match, xi);
clearOnPathSign(match);
}
outputRes(match->path);
}
int main() {
GRAPH_MATCH *graph = (GRAPH_MATCH *)malloc(sizeof(GRAPH_MATCH));
for (int i = 0 ; i < COUNT ; i++) {
for (int j = 0 ; j < COUNT ; j++) {
graph->edge[i][j] = 0;
}
}
graph->edge[0][1] = 1;
graph->edge[0][0] = 1;
graph->edge[1][1] = 1;
graph->edge[1][2] = 1;
graph->edge[2][1] = 1;
graph->edge[2][0] = 1;
graph->edge[3][2] = 1;
for (int j = 0 ; j < COUNT ; j++) {
graph->path[j] = -1;
graph->on_path[j] = false;
}
Hungary_match(graph);
}
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/185899.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
