
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
A星算法原理:
原理我就不再赘述,可以参考这篇博客https://blog.csdn.net/hitwhylz/article/details/23089415
最近用js写了一遍,用的同样的算法,需要js代码的看这里:https://blog.csdn.net/qq_39687901/article/details/85697127
代码实现:
首先添加两个通用类Array2D和Point:
class Array2D:
"""
说明:
1.构造方法需要两个参数,即二维数组的宽和高
2.成员变量w和h是二维数组的宽和高
3.使用:‘对象[x][y]’可以直接取到相应的值
4.数组的默认值都是0
"""
def __init__(self,w,h):
self.w=w
self.h=h
self.data=[]
self.data=[[0 for y in range(h)] for x in range(w)]
def showArray2D(self):
for y in range(self.h):
for x in range(self.w):
print(self.data[x][y],end=' ')
print("")
def __getitem__(self, item):
return self.data[item]
class Point:
"""
表示一个点
"""
def __init__(self,x,y):
self.x=x;self.y=y
def __eq__(self, other):
if self.x==other.x and self.y==other.y:
return True
return False
def __str__(self):
return "x:"+str(self.x)+",y:"+str(self.y)
Array2D是为了简化二维数组的创建,Point是为了表示一个点,并且重载等号运算符,可以判断两个Point坐标是否相等.
AStar类:
class AStar:
"""
AStar算法的Python3.x实现
"""
class Node: # 描述AStar算法中的节点数据
def __init__(self, point, endPoint, g=0):
self.point = point # 自己的坐标
self.father = None # 父节点
self.g = g # g值,g值在用到的时候会重新算
self.h = (abs(endPoint.x - point.x) + abs(endPoint.y - point.y)) * 10 # 计算h值
def __init__(self, map2d, startPoint, endPoint, passTag=0):
"""
构造AStar算法的启动条件
:param map2d: Array2D类型的寻路数组
:param startPoint: Point或二元组类型的寻路起点
:param endPoint: Point或二元组类型的寻路终点
:param passTag: int类型的可行走标记(若地图数据!=passTag即为障碍)
"""
# 开启表
self.openList = []
# 关闭表
self.closeList = []
# 寻路地图
self.map2d = map2d
# 起点终点
if isinstance(startPoint, Point) and isinstance(endPoint, Point):
self.startPoint = startPoint
self.endPoint = endPoint
else:
self.startPoint = Point(*startPoint)
self.endPoint = Point(*endPoint)
# 可行走标记
self.passTag = passTag
def getMinNode(self):
"""
获得openlist中F值最小的节点
:return: Node
"""
currentNode = self.openList[0]
for node in self.openList:
if node.g + node.h < currentNode.g + currentNode.h:
currentNode = node
return currentNode
def pointInCloseList(self, point):
for node in self.closeList:
if node.point == point:
return True
return False
def pointInOpenList(self, point):
for node in self.openList:
if node.point == point:
return node
return None
def endPointInCloseList(self):
for node in self.openList:
if node.point == self.endPoint:
return node
return None
def searchNear(self, minF, offsetX, offsetY):
"""
搜索节点周围的点
:param minF:F值最小的节点
:param offsetX:坐标偏移量
:param offsetY:
:return:
"""
# 越界检测
if minF.point.x + offsetX < 0 or minF.point.x + offsetX > self.map2d.w - 1 or minF.point.y + offsetY < 0 or minF.point.y + offsetY > self.map2d.h - 1:
return
# 如果是障碍,就忽略
if self.map2d[minF.point.x + offsetX][minF.point.y + offsetY] != self.passTag:
return
# 如果在关闭表中,就忽略
currentPoint = Point(minF.point.x + offsetX, minF.point.y + offsetY)
if self.pointInCloseList(currentPoint):
return
# 设置单位花费
if offsetX == 0 or offsetY == 0:
step = 10
else:
step = 14
# 如果不再openList中,就把它加入openlist
currentNode = self.pointInOpenList(currentPoint)
if not currentNode:
currentNode = AStar.Node(currentPoint, self.endPoint, g=minF.g + step)
currentNode.father = minF
self.openList.append(currentNode)
return
# 如果在openList中,判断minF到当前点的G是否更小
if minF.g + step < currentNode.g: # 如果更小,就重新计算g值,并且改变father
currentNode.g = minF.g + step
currentNode.father = minF
def start(self):
"""
开始寻路
:return: None或Point列表(路径)
"""
# 判断寻路终点是否是障碍
if self.map2d[self.endPoint.x][self.endPoint.y] != self.passTag:
return None
# 1.将起点放入开启列表
startNode = AStar.Node(self.startPoint, self.endPoint)
self.openList.append(startNode)
# 2.主循环逻辑
while True:
# 找到F值最小的点
minF = self.getMinNode()
# 把这个点加入closeList中,并且在openList中删除它
self.closeList.append(minF)
self.openList.remove(minF)
# 判断这个节点的上下左右节点
self.searchNear(minF, 0, -1)
self.searchNear(minF, 0, 1)
self.searchNear(minF, -1, 0)
self.searchNear(minF, 1, 0)
# 判断是否终止
point = self.endPointInCloseList()
if point: # 如果终点在关闭表中,就返回结果
# print("关闭表中")
cPoint = point
pathList = []
while True:
if cPoint.father:
pathList.append(cPoint.point)
cPoint = cPoint.father
else:
# print(pathList)
# print(list(reversed(pathList)))
# print(pathList.reverse())
return list(reversed(pathList))
if len(self.openList) == 0:
return None
最后,进行代码测试:
if __name__ == '__main__':
#创建一个10*10的地图
map2d=Array2D(10,10)
#设置障碍
map2d[4][0]= 1
map2d[4][1] = 1
map2d[4][2] = 1
map2d[4][3] = 1
map2d[4][4] = 1
map2d[4][5] = 1
map2d[4][6] = 1
#显示地图当前样子
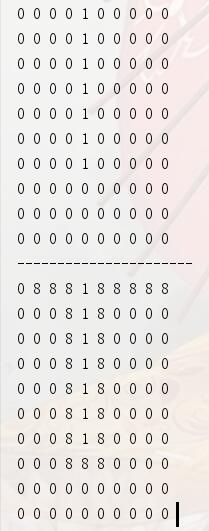
map2d.showArray2D()
#创建AStar对象,并设置起点为0,0终点为9,0
aStar=AStar(map2d,Point(0,0),Point(9,0))
#开始寻路
pathList=aStar.start()
#遍历路径点,在map2d上以'8'显示
for point in pathList:
map2d[point.x][point.y]=8
# print(point)
print("----------------------")
#再次显示地图
map2d.showArray2D()
运行效果:

最近用这个A星算法在游戏里实际应用上了:
https://blog.csdn.net/qq_39687901/article/details/88554716
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/185071.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...