大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
最近也注意一些图像拼接方面的文章,很多很多,尤其是全景图拼接的,实际上类似佳能相机附加的软件,好多具备全景图拼接,多幅图像自动软件实现拼接,构成(合成)一幅全景图像(风景)。
Sift算法,我略知一二,无法仔细描述(刚也贴了2个最近的资料)。
当就尺度空间(scale space),我想,其在计算机视觉(Computer Vision)/图像的多分辨率分析(尤其近年来小波的多分辨率分析)是常见的概念。
人 类视觉捕捉景物的时候,先粗略(rough),后细节(fine)的习惯,被研究图像视觉的采用。2点采样使用的情况,则整体图像被不断的1/2边长划 分,不同的图像(矩阵)构成了不同分辨率的尺度空间(我们理解为不同层面的矩阵),尺度,Scale,这里就代表不同的空间比例。
我注意到David Lowe关于Sfit算法,2004年发表在Int. Journal of Computer Vision的经典论文中,对尺度空间(scal space)是这样定义的 :
It has been shown by Koenderink (1984) and Lindeberg (1994) that under a variety of
reasonable assumptions the only possible scale-space kernel is the Gaussian function. Therefore,
the scale space of an image is defined as a function, L(x; y; delta) that is produced from the convolution of a variable-scale Gaussian, G(x; y; delta), with an input image, I(x; y):
因此 ,一个图像的尺度空间,L(x,y,delta) ,定义为原始图像I (x,y)与一个可变尺度的2维高斯函数G(x,y,delta) 卷积运算。
关于图象处理中的空间域卷积运算,可以参考经典的图像处理教材(比如 美国 冈萨雷斯的图象处理,第二版,或者其 Matlab版,都有如何在离散空间进行运算的例子和说明)
注:原文中 delta为希腊字母,这里无法表示,用delta代替。
Sift算法中,提到了尺度空间,请问什么是尺度和尺度空间呢?
在上述理解的基础上,尺度 就是受delta这个参数控制的表示 。
而不同的L(x,y,delta)就构成了尺度空间( Space ,我理解,由于描述图像的时候,一般用连续函数比较好描述公式,所以,采用空间集合 ,空间的概念正规一些) ,实际上,具体计算的时候,即使连续的高斯函数,都要被离散为(一般为奇数大小)(2*k+1) *(2*k+1)矩阵,来和数字图像进行卷积运算。
zz from http://hi.baidu.com/simonyuee/blog/item/b46f5d3ecb0eb53e70cf6ce7.html
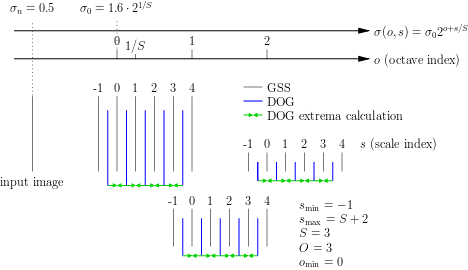

GSS and DoG scale space structures
GSS:Gaussian scale space(高斯尺度空间)
DoG: Difference of Gaussians(高斯差分)
octave index:层索引
scale index:尺度索引
建立图像的高斯尺度空间其实就是用高斯核对图像进行卷积,一层一层的平滑图像,一层又分若干个scale. 每个scale的采样步长为:
建立好高斯尺度空间后,再通过建立高斯差分尺度空间寻找图像的局部极值。高斯差分尺度空间建立很简单,对高斯尺度空间的连续图像相减就可以了。具体公式如下:  .
.
极值的确定如图:
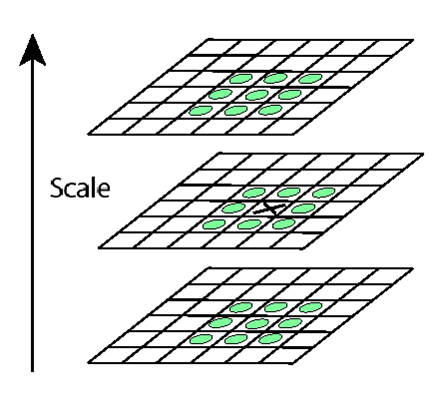
在图像高斯差分尺度空间内当前尺度和其相邻两个尺度3*3的区域内,标记的X和其他26个像素比较,如果X的灰度大于或者小于其他26个像素。那么这个X就是个极值。
建立高斯尺度空间有些细节的问题,具体可以看David G.low的论文。
zz from http://www.cppblog.com/wmgl/archive/2009/07/04/89220.html
尺度空间是SIFT[1]特征点提取方法的重要理论基础,本文的目的是解释一下SIFT为什么有尺度不变性。
其中 为高斯核,
为高斯核, 为尺度因子。其值越小表明图像被平滑得越小,其值越大表明图像被平滑得越大。大尺度对应于图像的概貌特征,小尺度对应于图像的细节。
为尺度因子。其值越小表明图像被平滑得越小,其值越大表明图像被平滑得越大。大尺度对应于图像的概貌特征,小尺度对应于图像的细节。
Lindeberg(1994)[12],在一系列合理的假设下,得出:
(1).高斯函数是尺度空间不变性的唯一卷积核。
(2).用 归一化的拉普拉斯算子(
归一化的拉普拉斯算子( )具有真正的尺度不变性。
)具有真正的尺度不变性。

图1- 7 归一化拉普拉斯算子对同一物理点的响应
图中上方的两幅图像是同一场景在不同分辨率下的图像,下方的两幅图像在不同尺度下归一化拉普拉斯函数()的响应。上方两幅图像的分辨率大小比例是2.5:1,下方两幅图像的响应的大值对应的尺度因子大小比为10.1/3.89。
[1] Lowe, D. 2004. Distinctive image features from scale-invariant keypoints.International Journal on Computer Vision 60(2):91–110.
zz from http://hi.baidu.com/hasae/blog/item/574052fd50f6421308244d55.html

(1-
5)
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/183949.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
