大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
上一篇博客是关于蚁群优化算法的,有兴趣的可以看下
https://blog.csdn.net/HuangChen666/article/details/115913181
1. 粒子群优化算法概述
2. 粒子群优化算法求解
2.1 连续解空间问题
2.2 构成要素
2.3 算法过程描述
2.4 粒子速度更新公式
2.5 速度更新参数分析
3. 粒子群优化算法小结
4. MATLAB代码
1. 粒子群优化算法概述
粒子群优化算法是一种基于
种群寻优的启发式搜索算法。在1995年由Kennedy和Eberhart首先提出来的。
它的主要启发来源于对
鸟群群体运动行为的研究。我们经常可以观察到鸟群表现出来的同步性,虽然每只鸟的运动行为都是互相
独立的,但是在整个鸟群的飞行过程中却表现出了高度一致性的复杂行为,并且可以自适应的调整飞行的状态和轨迹。
鸟群具有这样的复杂飞行行为的原因,可能是因为每只鸟在飞行过程中都遵循了一定的行为规则,并能够掌握邻域内其它鸟的飞行信息。
粒子群优化算法借鉴了这样的思想,每个粒子代表待求解问题搜索解空间中的一一个潜在解,它相当于一只飞行信息”包括粒子当前的
位置和速度两个状态量。
每个粒子都可以获得其邻域内其它个体的信息,对所经过的位置进行评价,井根据这些
信息和位置速度更新规则,改变自身的两个状态量,在“飞行”过程中传递信息和宣相学习,去更好地适应环境。随着这一过程的不断进行,粒子群最终能够找到问题的近似最优解。
2. 粒子群优化算法求解
粒子群优化算法一般适合解决连续解空间的问题,比如通过粒子群在解空间里进行搜索,找出极大值。
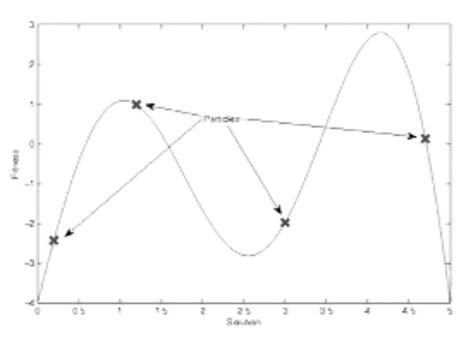

2.1 连续解空间问题
上图就是一个典型的粒子群优化算法求解极值的案例,可以看到初始时有四个粒子,求解过程可以理解为四个粒子不断向最大的粒子靠拢,在靠拢的过程中不断更新自身的最大值和整体的最大值,在自身最大值和整体最大值的影响下改变自身移动的速度,最终所有粒子均达到同一个极值的过程。
2.2 构成要素
1、粒子群
-
每个粒子对应所求解问题的一个可行解
即每个粒子本身就是一个可行解 -
粒子通过其位置和速度表示
在代码中的粒子用位置和速度表示,即横坐标表示粒子的位置,速度表示粒子接下来的运动趋势。
x n ( i ) x_n^{(i)} xn(i) 表示粒子 i 在第 n 轮的位置
v n ( i ) v_n^{(i)} vn(i) 表示粒子 i 在第 n 轮的速度
2、记录
- p b e s t ( i ) p_{best}^{(i)} pbest(i) 表示粒子 i 的历史最好位置
- g b e s t ( i ) g_{best}^{(i)} gbest(i) 表示全局历史最好位置
3、计算适应度的函数
- 适应度: f ( x ) f(x) f(x) 即函数表达式
2.3 算法过程描述
1、初始化
- 初始化粒子群:每个粒子的位置和速度,位置即每个粒子的初始 x x x 坐标,速度表示该粒子下一轮中 x x x 坐标的变化值,可正可负,即 x 0 ( i ) x_0^{(i)} x0(i) 和 v 0 ( i ) v_0^{(i)} v0(i)
- 初始化粒子 i 的历史最好位置 p b e s t ( i ) p_{best}^{(i)} pbest(i) 和全局粒子历史最好位置 g b e s t ( i ) g_{best}^{(i)} gbest(i) , p b e s t ( i ) p_{best}^{(i)} pbest(i)的初始值使用随机数赋值, g b e s t ( i ) g_{best}^{(i)} gbest(i)设置为一个无穷小值(因为这里以求最大值为例)
2、循环执行如下三步直至满足结束条件
- 计算每个粒子的适应度(即函数值): f ( x n ( i ) ) f(x_n^{(i)}) f(xn(i))
- 更新每个粒子历史最好适应度及其相应的位置,更新当前全局最好适应度及其相应的位置
- 更新每个粒子的速度和位置

粒子位置的更新即对每个粒子所在x轴的横坐标进行更新(其实每个粒子就是一个横坐标上的数),下一轮的位置等于上一轮的位置加上速度的变化乘以一个单位时间,所以这里的乘以1没有写出来。
2.4 粒子速度更新公式解读
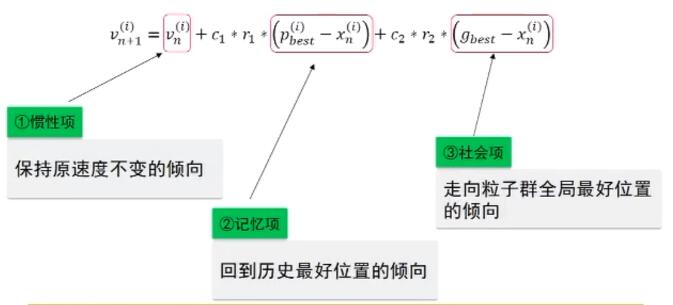
从公式可以看出粒子下一轮的速度 = 粒子上一轮的速度 + 回到自己历史最好位置的倾向 + 去向全局最好位置的倾向,即惯性项+记忆项+社会项。
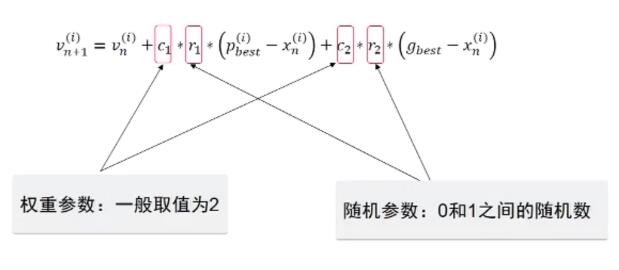
一般情况下确定了一个变量和其他变量的关系,下面就是参数的设置了,这里有两对参数 c k 和 r k c_k和r_k ck和rk, c k c_k ck 是权重参数,一般取值为2,实际上它影响了优化的速度, r k r_k rk 是随机参数,即0和1之间的随机数。
2.5 速度更新参数分析
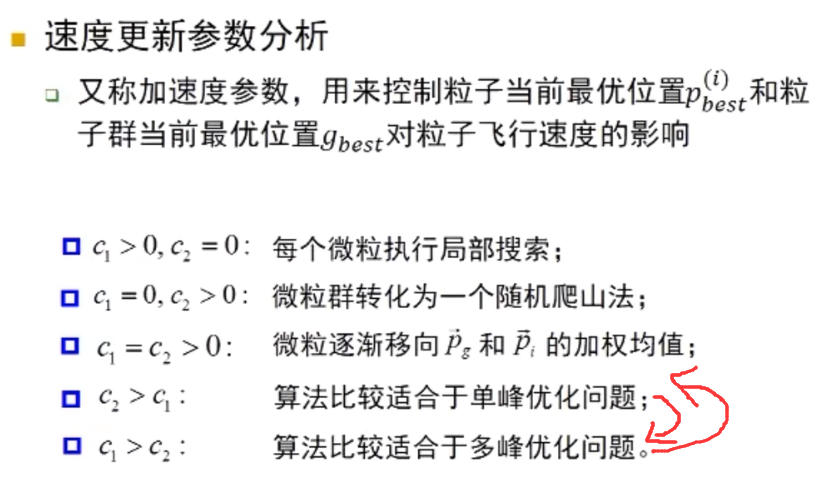
权重参数主要是影响了粒子飞行的速度,在今后的使用中一般设置 c 1 和 c 2 c_1和c_2 c1和c2相等的情况较多。
3. 粒子群优化算法改进
随着粒子群算法的广泛使用,人们发现如果加入一个惯性权重的话,优化的效果更好。
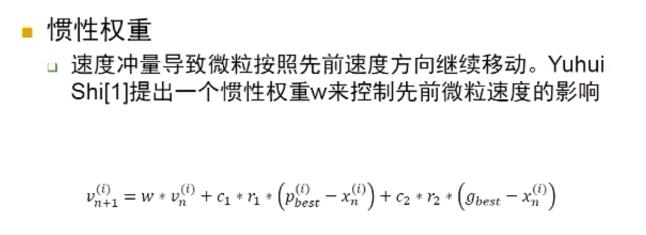
引入了一个 w w w 参数,控制先前粒子速度对下一轮粒子速度的影响,以适应不同场景。
4. MATLAB代码
求f= xsin(x)cos(2x) – 2xsin(3x)在[0,20]上的最大值

因为这里是多峰,所以设置权重参数c2>c1效果会更好。
代码借鉴 https://www.pianshen.com/article/2364328713/
clc;clear;
%% 初始化参数
f= @(x)x .* sin(x) .* cos(2 * x) - 2 * x .* sin(3 * x);
pnum=50; %粒子个数
iter=100; %迭代次数
w=0.8; %惯性权重
c1=0.8; %权重参数c1
c2=1.2; %权重参数c2
xlimit=[0,20]; %位置限制
vlimit=[-1,1]; %速度限制
figure(1);ezplot(f,[xlimit(1),0.01,xlimit(2)]);
Px=((xlimit(2)-xlimit(1))*rand(pnum,1))+xlimit(1); %随机产生粒子的初始位置
Pbest=Px; %粒子i历史上的最好位置
Gbest=[-inf,-inf]; %全局历史上的最好位置
Pymax=ones(pnum,1)/-eps; %粒子i历史上的最大值
Pymin=ones(pnum,1)/eps; %粒子i历史上的最小值
Pv=zeros(pnum,1); %初始化粒子速度
Py=f(Px); %计算粒子适应度
hold on;
plot(Px, Py, 'ro');title('初始状态图');
figure(2);
max_record=zeros(pnum,1);
%% 迭代求解
for i=1:iter
Py=f(Px); %计算粒子适应度
%更新Pbest和Gbest,粒子位置
for j=1:pnum
if Py(j)>Pymax(j)
Pymax(j)=Py(j);
Pbest(j)=Px(j);
end
end
% 全局最好的位置
if Gbest(1)<max(Pymax)
[Gbest(1),max_index]=max(Pymax);
Gbest(2)=Pbest(max_index);
end
max_record(i)=Gbest(1);
% 更新速度和位置
Pv=Pv*w+c1*rand*(Pbest-Px)+c2*rand*(repmat(Gbest(2),pnum,1)-Px);
Pv(Pv>vlimit(2))=vlimit(2);
Pv(Pv<vlimit(1))=vlimit(1);
Px=Px+Pv;
Px(Px>xlimit(2))=xlimit(2);
Px(Px<xlimit(1))=xlimit(1);
x0 =xlimit(1):0.01:xlimit(2);
plot(x0, f(x0), 'b-', Px, f(Px), 'ro');title('状态位置变化')
pause(0.1);
end
%% 得出结果
figure(3);plot(max_record);title('收敛过程');
disp(['最大值:',num2str(Gbest(1))]);
disp(['最大位置:',num2str(Gbest(2))]);
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/183134.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
