大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
看到一篇文章《计算机视觉中的曲率尺度空间技术: 基本概念与理论进展》——钟宝江,对于尺度空间的理解很有帮助,遂贴部分内容在此,如果涉及侵权,请告知,我会马上删除。
1 引言
尺度是计算机视觉与图象处理领域的一个重要概念。国际上有关尺度空间技术的研究大致分为如下两个分支:
线性尺度空间技术
其实现途径是将一维信号(如曲线的曲率函数)或二维信号(如图象)与高斯函数 作卷积运算。以一维信号 f (x) 为例,
作卷积运算。以一维信号 f (x) 为例,
其中t 被当作尺度参数。 等价地,
这一过程被称为对信号的演化,其中尺度参数值t由小到大逐渐增加。在演化过程中,信号上的特征被提取并加以分析,形成信号的尺度空间。设h(x)为另一个一维信号,显然有
这一技术因此被称为线性尺度空间技术。



非线性尺度空间技术
有时为了实现一些特殊效果(如保持图象中物体的边缘),可以修改信号
演化的方程式。一般情况下,由此构造的尺度空间不再满足线性性质(3),因此被称为非线性尺度空间技术。比如,线性尺度空间技术遵循各向同性的热扩散过程(2),而Perona和Malik[11]运用各向异性的热扩散方程演化信号:
其 中 G(z) 是一个非负的单调减函数,满足G(0) =1。由此构造了一款典型的非线性尺度空间技术。作为尺度空间技术的重要特例,曲率尺度空间技术以二维物体或三维物体的二维视觉为研究对象,以曲率特征点为工具对物体的形状进行描述和分析。从其实现途径来说,该技术既可以是一种线性尺度空间技术,也可以是一种非线性尺度空间技术。本文首先形象地解释“尺度空间”这一概念在解决与形状相关的视觉问题时其具体含义和重要性,然后简要概述最近二十多年来曲率尺度空间技术在理论上的发展情况。

2 尺度空间概念
“尺度空间”的概念对所有尺度空间技术都是本质相同的。这里我们构造两个简单而又直观形象的例子来解释这一概念在解决与形状相关的视觉问题时具体含义和重要性,从而明确曲率尺度空间技术的基本思想。我们相信这两个例子对理解其它尺度空间技术的原理也会有帮助。
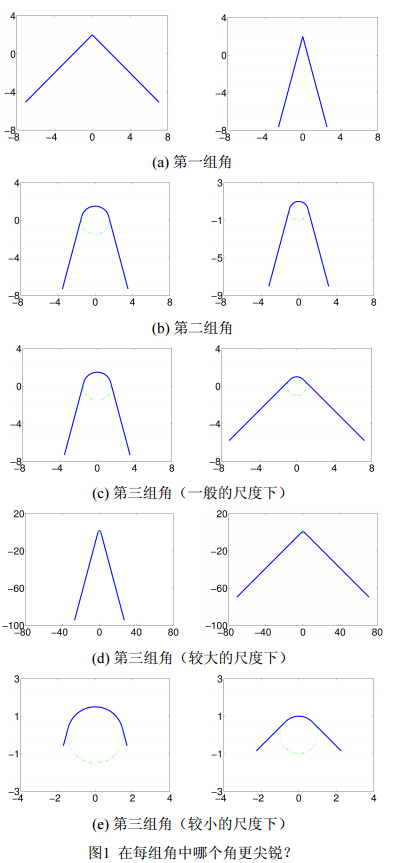
例1. 哪个角更尖锐?图1中给出了三组角(注:图
1(c)-1(e)为同一组角的不同显示)。需要我们判断在每组角中哪个角更为尖锐。图1(a)中,显然右边的角更尖锐,这是因为同左边的角相比其角度值较小。图1(b)中,也是右边的角更尖锐,这是因为同左边的角相比其曲率值较大。对于图1(c)中的第三组角,问题的答案则要困难得多。左边的角一方面具有较小的角度值(因此更尖锐),另一方面又具有较小的曲率值(因此更圆钝)。右边的角情形刚好相反,一方面因为具有较大的角度值更圆钝,另一方面又因为具有较大的曲率值显得更尖锐。事实上,本问题对于第一组角和第二组角来说是纯粹的数学问题,依据数学上的基本概念(即角度、曲率)便可以做出判断。而第三组中两个角之间的比较已经不再是纯粹的数学问题,在数学上没有明确的答案。确切地说,这是一个尺度空间中的视觉问题,其答案取决于问题所在的“尺度”而不是某个数学指标。这里,“尺度”可以被直观地理解为观察窗口的大小。在图1(c)中,我们观察两个角的窗口大小都是16×12 (标准单位2)。在图1(d)中,调整了观察窗口,其大小变成160×120 (假设所比较的两个角都具有无限长的边)。在这个较大的尺度下,问题的答案变得非常明朗: 左边的角更加尖锐。在图1(e)中,观察窗口的大小变更为8× 6。在这个小的尺度下,问题的答案发生了有趣的变化:此时右边的角更加尖锐。
例1的结果阐述了“尺度”对于解决视觉问题的重要性,即一个视觉问题的答案往往会依赖于其所在的尺度。在生活中这样的例子也比比皆是,比如要观察一棵树,所选择的尺度应该是“米”级;如果观察树上的树叶,所选择的尺度则应该是“厘米”级。一般来说,摄像设备所能呈现的画面分辨率是固定的。要以同样的分辨率分别观察树和树叶, 我们需要调整摄像设备的摄像位置。因此,视觉问题中的“尺度”概念也可以被形象地理解为摄像设备与被观察物体之间的距离:较远的距离对应较大的尺度,较近的距离对应较小的尺度。
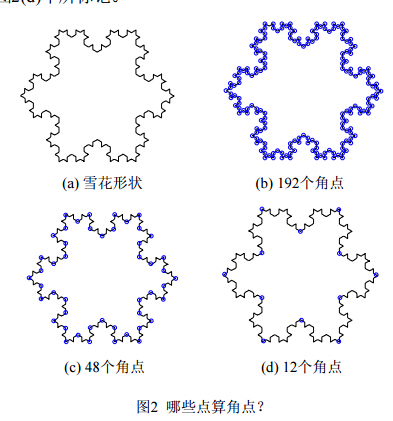
例2. 哪些点算角点?图2(a)呈现了一片雪花的形状轮廓,要求我们找出该形状上的角点。在很多计算机视觉任务中,角点都有着重要的作用。数学上,角点一般是指大曲率点或曲率无穷大点。 在图2(b)中,雪花形状
上所有曲率无穷大点都被确认为角点, 一共有192个,如圆圈所标记。这个答案在数学上无疑是正确的、完美的,但它对于完成一个视觉任务(比如理解和分析这个形状)来说并没有多大的意义。如果我们仅选择图2(c)中所标记出的48个点作为角点,感觉上要更好点。作为图2(b)中所标记的192个角点中的一部分,这48个角点在理解和分析雪花形状的结构时要比其余的角点具有更高的重要性。实际上,按照这一思路,我们不难发现在这48个角点中又有12个角点其重要性还要更高一些,如图2(d)中所标记。
同例1一样,本例中问题的答案依赖于问题所在的尺度。当我们非常靠近雪花形状观察它时(即在较小的尺度下),能够看清楚所有的细节,却不容易感知其整体轮廓,从而倾向于不加区分地选取图2(b)中所标记的192个点作为角点。反过来,当我们从一个很远的距离观察雪花形状时(即在较大的尺度下),虽然轮廓的细节已经模糊不清,但却能够一眼看出其整体结构,从而倾向于选取图2(d)中所标记的12个点作为角点。此外,图2(c)中所标记的角点对于理解雪花形状也很有帮助。事实上,如果我们不是保守地将自己固定在某个尺度下来观察物体,便能够获得充足的视觉信息。比如说图2(b)-2(d)所呈现的三组角点已经很好地向我们展示了雪花形状的三个结构层次。这一效果是其中的任意一组角点都无法实现的。现实生活中视觉问题的复杂性也往往需要我们做到这一点:当我们去参观某处文化遗迹时,远远地就已经开始观察建筑物的外形,然后较近距离时开始注意到门窗、台阶、梁柱的建筑风格,最后会凑上
前去细看门窗上的图案、石碑上的碑文等。当一部机器人也能够自主地做到这一点时,说明它已经具备了更高的人工智能。我们对尺度空间技术的研究也正是朝着这个方向努力。概括地说,“尺度空间”的概念就是在多个尺度下观察目标,然后加以综合的分析和理解。
特征不变性:
特征一般有局部不变性,局部不变性一般包括两个方面:尺度不变性与旋转不变性。
-
尺度不变性:人类在识别一个物体时,不管这个物体或远或近,都能对它进行正确的辨认,这就是所谓的尺度不变性。尺度空间理论经常与生物视觉关联,有人也称图像局部不变性特征为基于生物视觉的不变性方法。
-
旋转不变性:当这个物体发生旋转时,我们照样可以正确地辨认它,这就是所谓的旋转不变性
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/182138.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
