大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用

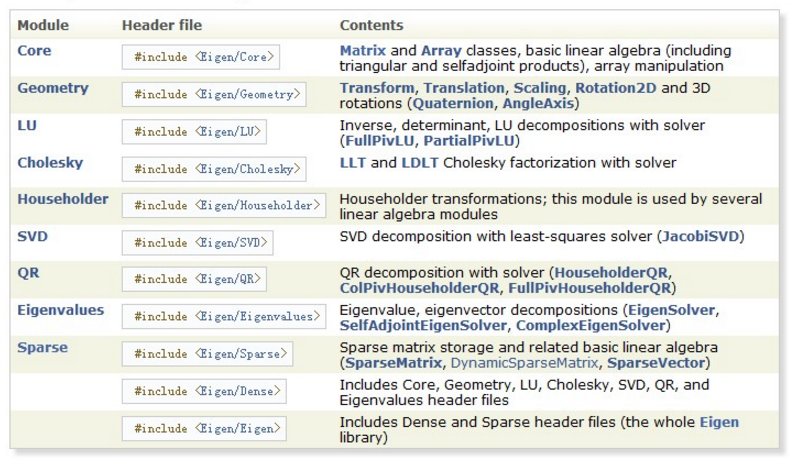
Eigen是可以用来进行线性代数、矩阵、向量操作等运算的C++库,它里面包含了很多算法。它的License是MPL2。它支持多平台。
Eigen采用源码的方式提供给用户使用,在使用时只需要包含Eigen的头文件即可进行使用。之所以采用这种方式,是因为Eigen采用模板方式实现,由于模板函数不支持分离编译,所以只能提供源码而不是动态库的方式供用户使用。
矩阵的定义:Eigen中关于矩阵类的模板函数中,共有六个模板参数,常用的只有前三个。其前三个参数分别表示矩阵元素的类型、行数和列数。
矩阵定义时可以使用Dynamic来表示矩阵的行列数为未知。
Eigen中无论是矩阵还是数组、向量,无论是静态矩阵还是动态矩阵都提供默认构造函数,也就是定义这些数据结构时都可以不用提供任何参数,其大小均由运行时来确定。矩阵的构造函数中只提供行列数、元素类型的构造参数,而不提供元素值的构造,对于比较小的、固定长度的向量提供初始化元素的定义。
矩阵类型:Eigen中的矩阵类型一般都是用类似MatrixXXX来表示,可以根据该名字来判断其数据类型,比如”d”表示double类型,”f”表示float类型,”i”表示整数,”c”表示复数;Matrix2f,表示的是一个2*2维的,其每个元素都是float类型。
数据存储:Matrix创建的矩阵默认是按列存储,Eigen在处理按列存储的矩阵时会更加高效。如果想修改可以在创建矩阵的时候加入参数,如:
Matrix<int,3, 4, ColMajor> Acolmajor;
Matrix<int,3, 4, RowMajor> Arowmajor;
动态矩阵和静态矩阵:动态矩阵是指其大小在运行时确定,静态矩阵是指其大小在编译时确定。
MatrixXd:表示任意大小的元素类型为double的矩阵变量,其大小只有在运行时被赋值之后才能知道。
Matrix3d:表示元素类型为double大小为3*3的矩阵变量,其大小在编译时就知道。
在Eigen中行优先的矩阵会在其名字中包含有row,否则就是列优先。
Eigen中的向量只是一个特殊的矩阵,其维度为1而已。
矩阵元素的访问:在矩阵的访问中,行索引总是作为第一个参数,Eigen中矩阵、数组、向量的下标都是从0开始。矩阵元素的访问可以通过”()”操作符完成。例如m(2, 3)既是获取矩阵m的第2行第3列元素。
针对向量还提供”[]”操作符,注意矩阵则不可如此使用。
设置矩阵的元素:在Eigen中重载了”<<”操作符,通过该操作符即可以一个一个元素的进行赋值,也可以一块一块的赋值。另外也可以使用下标进行赋值。
重置矩阵大小:当前矩阵的行数、列数、大小可以通过rows()、cols()和size()来获取,对于动态矩阵可以通过resize()函数来动态修改矩阵的大小。注意:(1)、固定大小的矩阵是不能使用resize()来修改矩阵的大小;(2)、resize()函数会析构掉原来的数据,因此调用resize()函数之后将不能保证元素的值不改变;(3)、使用”=”操作符操作动态矩阵时,如果左右两边的矩阵大小不等,则左边的动态矩阵的大小会被修改为右边的大小。
如何选择动态矩阵和静态矩阵:对于小矩阵(一般大小小于16)使用固定大小的静态矩阵,它可以带来比较高的效率;对于大矩阵(一般大小大于32)建议使用动态矩阵。注意:如果特别大的矩阵使用了固定大小的静态矩阵则可能会造成栈溢出的问题。
矩阵和向量的算术运算:在Eigen中算术运算重载了C++的+、-、*
(1)、矩阵的运算:提供+、-、一元操作符”-”、+=、-=;二元操作符+/-,表示两矩阵相加(矩阵中对应元素相加/减,返回一个临时矩阵);一元操作符-表示对矩阵取负(矩阵中对应元素取负,返回一个临时矩阵);组合操作法+=或者-=表示(对应每个元素都做相应操作);矩阵还提供与标量(单一数字)的乘除操作,表示每个元素都与该标量进行乘除操作;
(2)、求矩阵的转置、共轭矩阵、伴随矩阵:可以通过成员函数transpose()、conjugate()、adjoint()来完成。注意:这些函数返回操作后的结果,而不会对原矩阵的元素进行直接操作,如果要让原矩阵进行转换,则需要使用响应的InPlace函数,如transpoceInPlace()等;
(3)、矩阵相乘、矩阵向量相乘:使用操作符*,共有*和*=两种操作符;
(4)、矩阵的块操作:有两种使用方法:
matrix.block(i,j, p, q) : 表示返回从矩阵(i, j)开始,每行取p个元素,每列取q个元素所组成的临时新矩阵对象,原矩阵的元素不变;
matrix.block<p,q>(i, j) :<p, q>可理解为一个p行q列的子矩阵,该定义表示从原矩阵中第(i, j)开始,获取一个p行q列的子矩阵,返回该子矩阵组成的临时矩阵对象,原矩阵的元素不变;
(5)、向量的块操作:
获取向量的前n个元素:vector.head(n);
获取向量尾部的n个元素:vector.tail(n);
获取从向量的第i个元素开始的n个元素:vector.segment(i,n);
Map类:在已经存在的矩阵或向量中,不必拷贝对象,而是直接在该对象的内存上进行运算操作。
1. 从http://eigen.tuxfamily.org/index.php?title=Main_Page下载最新稳定版本3.2.5,解压缩;
2. 新建一个vs2013 TestEigen控制台工程,将Eigen文件所在目录加入到工程属性的C/C++附加包含目录中,这样就可以使用Eigen中的函数了;
3. TestEigen.cpp文件中的内容为:
#include "stdafx.h"
#include <iostream>
#include <Eigen/Dense>
template <typename T>
static void matrix_mul_matrix(T* p1, int iRow1, int iCol1, T* p2, int iRow2, int iCol2, T* p3)
{
if (iRow1 != iRow2) return;
//列优先
//Eigen::Map< Eigen::Matrix<T, Eigen::Dynamic, Eigen::Dynamic> > map1(p1, iRow1, iCol1);
//Eigen::Map< Eigen::Matrix<T, Eigen::Dynamic, Eigen::Dynamic> > map2(p2, iRow2, iCol2);
//Eigen::Map< Eigen::Matrix<T, Eigen::Dynamic, Eigen::Dynamic> > map3(p3, iCol1, iCol2);
//行优先
Eigen::Map< Eigen::Matrix<T, Eigen::Dynamic, Eigen::Dynamic, Eigen::RowMajor> > map1(p1, iRow1, iCol1);
Eigen::Map< Eigen::Matrix<T, Eigen::Dynamic, Eigen::Dynamic, Eigen::RowMajor> > map2(p2, iRow2, iCol2);
Eigen::Map< Eigen::Matrix<T, Eigen::Dynamic, Eigen::Dynamic, Eigen::RowMajor> > map3(p3, iCol1, iCol2);
map3 = map1 * map2;
}
int main(int argc, char* argv[])
{
//1. 矩阵的定义
Eigen::MatrixXd m(2, 2);
Eigen::Vector3d vec3d;
Eigen::Vector4d vec4d(1.0, 2.0, 3.0, 4.0);
//2. 动态矩阵、静态矩阵
Eigen::MatrixXd matrixXd;
Eigen::Matrix3d matrix3d;
//3. 矩阵元素的访问
m(0, 0) = 1;
m(0, 1) = 2;
m(1, 0) = m(0, 0) + 3;
m(1, 1) = m(0, 0) * m(0, 1);
std::cout << m << std::endl << std::endl;
//4. 设置矩阵的元素
m << -1.5, 2.4,
6.7, 2.0;
std::cout << m << std::endl << std::endl;
int row = 4;
int col = 5;
Eigen::MatrixXf matrixXf(row, col);
matrixXf << 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20;
std::cout << matrixXf << std::endl << std::endl;
matrixXf << Eigen::MatrixXf::Identity(row, col);
std::cout << matrixXf << std::endl << std::endl;
//5. 重置矩阵大小
Eigen::MatrixXd matrixXd1(3, 3);
m = matrixXd1;
std::cout << m.rows() << " " << m.cols() << std::endl << std::endl;
//6. 矩阵运算
m << 1, 2, 7,
3, 4, 8,
5, 6, 9;
std::cout << m << std::endl;
matrixXd1 = Eigen::Matrix3d::Random();
m += matrixXd1;
std::cout << m << std::endl << std::endl;
m *= 2;
std::cout << m << std::endl << std::endl;
std::cout << -m << std::endl << std::endl;
std::cout << m << std::endl << std::endl;
//7. 求矩阵的转置、共轭矩阵、伴随矩阵
std::cout << m.transpose() << std::endl << std::endl;
std::cout << m.conjugate() << std::endl << std::endl;
std::cout << m.adjoint() << std::endl << std::endl;
std::cout << m << std::endl << std::endl;
m.transposeInPlace();
std::cout << m << std::endl << std::endl;
//8. 矩阵相乘、矩阵向量相乘
std::cout << m*m << std::endl << std::endl;
vec3d = Eigen::Vector3d(1, 2, 3);
std::cout << m * vec3d << std::endl << std::endl;
std::cout << vec3d.transpose()*m << std::endl << std::endl;
//9. 矩阵的块操作
std::cout << m << std::endl << std::endl;
std::cout << m.block(1, 1, 2, 2) << std::endl << std::endl;
std::cout << m.block<1, 2>(0, 0) << std::endl << std::endl;
std::cout << m.col(1) << std::endl << std::endl;
std::cout << m.row(0) << std::endl << std::endl;
//10. 向量的块操作
Eigen::ArrayXf arrayXf(10);
arrayXf << 1, 2, 3, 4, 5, 6, 7, 8, 9, 10;
std::cout << vec3d << std::endl << std::endl;
std::cout << arrayXf << std::endl << std::endl;
std::cout << arrayXf.head(5) << std::endl << std::endl;
std::cout << arrayXf.tail(4) * 2 << std::endl << std::endl;
//11. 求解矩阵的特征值和特征向量
Eigen::Matrix2f matrix2f;
matrix2f << 1, 2, 3, 4;
Eigen::SelfAdjointEigenSolver<Eigen::Matrix2f> eigenSolver(matrix2f);
if (eigenSolver.info() == Eigen::Success) {
std::cout << eigenSolver.eigenvalues() << std::endl << std::endl;
std::cout << eigenSolver.eigenvectors() << std::endl << std::endl;
}
//12. 类Map及动态矩阵的使用
int array1[4] = { 1, 2, 3, 4 };
int array2[4] = { 5, 6, 7, 8 };
int array3[4] = { 0, 0, 0, 0};
matrix_mul_matrix(array1, 2, 2, array2, 2, 2, array3);
for (int i = 0; i < 4; i++)
std::cout << array3[i] << std::endl;
return 0;
}
参考文献:
1. http://blog.csdn.net/augusdi/article/details/12907341
2. http://www.docin.com/p-863098431.html
3. http://www.360doc.com/content/15/0325/15/21172899_457946100.shtml
4. http://www.360doc.com/content/15/0413/22/21172899_463003614.shtml
GitHub:https://github.com/fengbingchun/Eigen_Test
Eigen: C++开源矩阵计算工具——Eigen的简单用法
Eigen非常方便矩阵操作,当然它的功能不止如此,由于本人只用到了它的矩阵相关操作,所以这里只给出了它的一些矩阵相关的简单用法,以方便快速入门。矩阵操作在算法研究过程中,非常重要,例如在图像处理中二维高斯拟合求取光斑中心时使用Eigen提供的矩阵算法,差不多十来行代码即可实现,具体可见:http://blog.csdn.net/hjx_1000/article/details/8490653
Eigen的下载与安装,可参考下面两个博客:
http://blog.csdn.net/hjx_1000/article/details/8477522
或者:http://blog.csdn.net/abcjennifer/article/details/7781936;
Eigen帮助文档的地址:http://eigen.tuxfamily.org/dox/pages.html,本文中很多例子也是直接摘自这些帮助文档,
另外关于Eigen的论坛可以访问http://forum.kde.org/viewforum.php?f=74
Eigen用源码的方式提供给用户使用,在使用时只需要包含Eigen的头文件即可进行使用。
之所以采用这种方式,是因为Eigen采用模板方式实现,由于模板函数不支持分离编译,所以只能提供源码而不是动态库的方式供用户使用,不过这也也更方面用户使用和研究。关于模板的不支持分离编译的更多内容,请参考:http://blog.csdn.net/hjx_1000/article/details/8093701
1、 矩阵的定义
Eigen中关于矩阵类的模板函数中,共有6个模板参数,但是目前常用的只有前三个,如下所示:
template<typename _Scalar, int _Rows, int _Cols, int _Options, int _MaxRows, int _MaxCols>
struct traits<Matrix<_Scalar, _Rows, _Cols, _Options, _MaxRows, _MaxCols> >
.......Dynamic来表示矩阵的行列数为未知,例如:
|
|
| typedef Matrix< double , 3 , 1> Vector3d |
注意:
(1)Eigen中无论是矩阵还是数组、向量,无论是静态矩阵还是动态矩阵都提供默认构造函数,也就是你定义这些数据结构时都可以不用提供任何参数,其大小均由运行时来确定。
(2)矩阵的构造函数中只提供行列数、元素类型的构造参数,而不提供元素值的构造,对于比较小的、固定长度的向量提供初始化元素的定义,例如:
Vector2d a(5.0, 6.0);
Vector3d b(5.0, 6.0, 7.0);
Vector4d c(5.0, 6.0, 7.0, 8.0);2、动态矩阵和静态矩阵
动态矩阵是指其大小在运行时确定,静态矩阵是指其大小在编译时确定,在Eigen中并未这样称呼矩阵。具体可见如下两段代码:
代码段1:
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
using namespace std;
int main()
{
MatrixXd m = MatrixXd::Random(3,3);
m = (m + MatrixXd::Constant(3,3,1.2)) * 50;
cout << "m =" << endl << m << endl;
VectorXd v(3);
v << 1, 2, 3;
cout << "m * v =" << endl << m * v << endl;
}代码段2:
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
using namespace std;
int main()
{
Matrix3d m = Matrix3d::Random();
m = (m + Matrix3d::Constant(1.2)) * 50;
cout << "m =" << endl << m << endl;
Vector3d v(1,2,3);
cout << "m * v =" << endl << m * v << endl;
}说明:
1)代码段1中MatrixXd表示任意大小的元素类型为double的矩阵变量,其大小只有在运行时被赋值之后才能知道; MatrixXd::Random(3,3)表示产生一个元素类型为double的3*3的临时矩阵对象。
2) 代码段2中Matrix3d表示元素类型为double大小为3*3的矩阵变量,其大小在编译时就知道;
3)上例中向量的定义也是类似,不过这里的向量时列优先,在Eigen中行优先的矩阵会在其名字中包含有row,否则就是列优先。
4)向量只是一个特殊的矩阵,其一个维度为1而已,如:typedef Matrix< double , 3 , 1> Vector3d
3、矩阵元素的访问
在矩阵的访问中,行索引总是作为第一个参数,需注意Eigen中遵循大家的习惯让矩阵、数组、向量的下标都是从0开始。矩阵元素的访问可以通过()操作符完成,例如m(2,3)即是获取矩阵m的第2行第3列元素(注意行列数从0开始)。可参看如下代码:
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
int main()
{
MatrixXd m(2,2);
m(0,0) = 3;
m(1,0) = 2.5;
m(0,1) = -1;
m(1,1) = m(1,0) + m(0,1);
std::cout << "Here is the matrix m:\n" << m << std::endl;
VectorXd v(2);
v(0) = 4;
v(1) = v(0) - 1;
std::cout << "Here is the vector v:\n" << v << std::endl;
}其输出结果为:
Here is the matrix m:
3 -1
2.5 1.5
Here is the vector v:
4
3
针对向量还提供[]操作符,注意矩阵则不可如此使用,原因为:在C++中m[i, j]中逗号表达式 “i, j”的值始终都是“j”的值,即m[i, j]对于C++来讲就是m[j];
4、设置矩阵的元素
在Eigen中重载了”<<“操作符,通过该操作符即可以一个一个元素的进行赋值,也可以一块一块的赋值。另外也可以使用下标进行复制,例如下面两段代码:
代码段1
Matrix3f m;
m << 1, 2, 3,
4, 5, 6,
7, 8, 9;
std::cout << m;输出结果为:
1 2 3
4 5 6
7 8 9
VectorXf m_Vector_A;
MatrixXf m_matrix_B;
int m_iN =-1;
bool InitData(int pSrc[100][100], int iWidth, int iHeight)
{
if (NULL == pSrc || iWidth <=0 || iHeight <= 0)
return false;
m_iN = iWidth*iHeight;
VectorXf tmp_A(m_iN);
MatrixXf tmp_B(m_iN, 5);
int i =0, j=0, iPos =0;
while(i<iWidth)
{
j=0;
while(j<iHeight)
{
tmp_A(iPos) = pSrc[i][j] * log((float)pSrc[i][j]);
tmp_B(iPos,0) = pSrc[i][j] ;
tmp_B(iPos,1) = pSrc[i][j] * i;
tmp_B(iPos,2) = pSrc[i][j] * j;
tmp_B(iPos,3) = pSrc[i][j] * i * i;
tmp_B(iPos,4) = pSrc[i][j] * j * j;
++iPos;
++j;
}
++i;
}
m_Vector_A = tmp_A;
m_matrix_B = tmp_B;
}(3) 使用“=”操作符操作动态矩阵时,如果左右边的矩阵大小不等,则左边的动态矩阵的大小会被修改为右边的大小。例如下面的代码段:
MatrixXf a(2,2);
std::cout << "a is of size " << a.rows() << "x" << a.cols() << std::endl;
MatrixXf b(3,3);
a = b;
std::cout << "a is now of size " << a.rows() << "x" << a.cols() << std::endl;a is of size 2x2
a is now of size 3x36、如何选择动态矩阵和静态矩阵?
还需特别注意的是:如果特别大的矩阵使用了固定大小的静态矩阵则可能造成栈溢出的问题
———————————————————————————————
本文主要是Eigen中矩阵和向量的算术运算,在Eigen中的这些算术运算重载了C++的+,-,*,所以使用起来非常方便。
1、矩阵的运算
Eigen提供+、-、一元操作符“-”、+=、-=,例如:
二元操作符+/-表示两矩阵相加(矩阵中对应元素相加/减,返回一个临时矩阵): B+C 或 B-C;
一元操作符-表示对矩阵取负(矩阵中对应元素取负,返回一个临时矩阵): -C;
组合操作法+=或者-=表示(对应每隔元素都做相应操作):A += B 或者 A-=B
代码段1为矩阵的加减操作,代码如下:
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
int main()
{
Matrix2d a;
a << 1, 2,
3, 4;
MatrixXd b(2,2);
b << 2, 3,
1, 4;
std::cout << "a + b =\n" << a + b << std::endl;
std::cout << "a - b =\n" << a - b << std::endl;
std::cout << "Doing a += b;" << std::endl;
a += b;
std::cout << "Now a =\n" << a << std::endl;
Vector3d v(1,2,3);
Vector3d w(1,0,0);
std::cout << "-v + w - v =\n" << -v + w - v << std::endl;
}输出结果为:
a + b =
3 5
4 8
a - b =
-1 -1
2 0
Doing a += b;
Now a =
3 5
4 8
-v + w - v =
-1
-4
-6
另外,矩阵还提供与标量(单一个数字)的乘除操作,表示每个元素都与该标量进行乘除操作。例如:
二元操作符*在:A*a中表示矩阵A中的每隔元素都与数字a相乘,结果放在一个临时矩阵中,矩阵的值不会改变。
对于a*A、A/a、A*=a、A /=a也是一样,例如下面的代码:
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
int main()
{
Matrix2d a;
a << 1, 2,
3, 4;
Vector3d v(1,2,3);
std::cout << "a * 2.5 =\n" << a * 2.5 << std::endl;
std::cout << "0.1 * v =\n" << 0.1 * v << std::endl;
std::cout << "Doing v *= 2;" << std::endl;
v *= 2;
std::cout << "Now v =\n" << v << std::endl;
}输出结果为:
a * 2.5 =
2.5 5
7.5 10
0.1 * v =
0.1
0.2
0.3
Doing v *= 2;
Now v =
2
4
6
需要注意:
在Eigen中,算术操作例如 “操作符+”并不会自己执行计算操作,他们只是返回一个“算术表达式对象”,而实际的计算则会延迟到后面的赋值时才进行。这些不影响你的使用,它只是为了方便Eigen的优化。
2、求矩阵的转秩、共轭矩阵、伴随矩阵。
可以通过 成员函数transpose(), conjugate(),和 adjoint()来完成,注意这些函数返回操作后的结果,而不会对原矩阵的元素进行直接操作,如果要让原矩阵的进行转换,则需要使用响应的InPlace函数,例如:transposeInPlace() 、 adjointInPlace() 之类。
例如下面的代码所示:
MatrixXcf a = MatrixXcf::Random(2,2);
cout << "Here is the matrix a\n" << a << endl;
cout << "Here is the matrix a^T\n" << a.transpose() << endl;
cout << "Here is the conjugate of a\n" << a.conjugate() << endl;
cout << "Here is the matrix a^*\n" << a.adjoint() << endl;输出结果为:
Here is the matrix a
(-0.211,0.68) (-0.605,0.823)
(0.597,0.566) (0.536,-0.33)
Here is the matrix a^T
(-0.211,0.68) (0.597,0.566)
(-0.605,0.823) (0.536,-0.33)
Here is the conjugate of a
(-0.211,-0.68) (-0.605,-0.823)
(0.597,-0.566) (0.536,0.33)
Here is the matrix a^*
(-0.211,-0.68) (0.597,-0.566)
(-0.605,-0.823) (0.536,0.33)
3、矩阵相乘、矩阵向量相乘
矩阵的相乘,矩阵与向量的相乘也是使用操作符*,共有*和*=两种操作符,其用法可以参考如下代码
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
int main()
{
Matrix2d mat;
mat << 1, 2,
3, 4;
Vector2d u(-1,1), v(2,0);
std::cout << "Here is mat*mat:\n" << mat*mat << std::endl;
std::cout << "Here is mat*u:\n" << mat*u << std::endl;
std::cout << "Here is u^T*mat:\n" << u.transpose()*mat << std::endl;
std::cout << "Here is u^T*v:\n" << u.transpose()*v << std::endl;
std::cout << "Here is u*v^T:\n" << u*v.transpose() << std::endl;
std::cout << "Let's multiply mat by itself" << std::endl;
mat = mat*mat;
std::cout << "Now mat is mat:\n" << mat << std::endl;
}输出结果为:
Here is mat*mat:
7 10
15 22
Here is mat*u:
1
1
Here is u^T*mat:
2 2
Here is u^T*v:
-2
Here is u*v^T:
-2 -0
2 0
Let's multiply mat by itself
Now mat is mat:
7 10
15 22——————————————————————————————–
本节主要涉及Eigen的块操作以及QR分解,Eigen的QR分解非常绕人,搞了很久才搞明白是怎么回事,最后是一个使用Eigen的矩阵操作完成二维高斯拟合求取光点的代码例子,关于二维高斯拟合求取光点的详细内容可参考:http://blog.csdn.net/hjx_1000/article/details/8490653
1、矩阵的块操作
1)矩阵的块操作有两种使用方法,其定义形式为:
matrix.block(i,j,p,q); (1)
matrix.block<p,q>(i,j); (2)定义(1)表示返回从矩阵的(i, j)开始,每行取p个元素,每列取q个元素所组成的临时新矩阵对象,原矩阵的元素不变。
定义(2)中block(p, q)可理解为一个p行q列的子矩阵,该定义表示从原矩阵中第(i, j)开始,获取一个p行q列的子矩阵,返回该子矩阵组成的临时 矩阵对象,原矩阵的元素不变。
详细使用情况,可参考下面的代码段:
#include <Eigen/Dense>
#include <iostream>
using namespace std;
int main()
{
Eigen::MatrixXf m(4,4);
m << 1, 2, 3, 4,
5, 6, 7, 8,
9,10,11,12,
13,14,15,16;
cout << "Block in the middle" << endl;
cout << m.block<2,2>(1,1) << endl << endl;
for (int i = 1; i <= 3; ++i)
{
cout << "Block of size " << i << "x" << i << endl;
cout << m.block(0,0,i,i) << endl << endl;
}
}输出的结果为:
Block in the middle
6 7
10 11
Block of size 1x1
1
Block of size 2x2
1 2
5 6
Block of size 3x3
1 2 3
5 6 7
9 10 11通过上述方式获取的子矩阵即可以作为左值也可以作为右值,也就是即可以用这个子矩阵给其他矩阵赋值,也可以给这个子矩阵对象赋值。
2)矩阵也提供了获取其指定行/列的函数,其实获取某行/列也是一种特殊的获取子块。可以通过 .col()和 .row()来完成获取指定列/行的操作,参数为列/行的索引。
注意:
(1)需与获取矩阵的行数/列数的函数( rows(), cols() )的进行区别,不要弄混淆。
(2)函数参数为响应行/列的索引,需注意矩阵的行列均以0开始。
下面的代码段用于演示获取矩阵的指定行列:
#include <Eigen/Dense>
#include <iostream>
using namespace std;
int main()
{
Eigen::MatrixXf m(3,3);
m << 1,2,3,
4,5,6,
7,8,9;
cout << "Here is the matrix m:" << endl << m << endl;
cout << "2nd Row: " << m.row(1) << endl;
m.col(2) += 3 * m.col(0);
cout << "After adding 3 times the first column into the third column, the matrix m is:\n";
cout << m << endl;
}输出结果为:
Here is the matrix m:
1 2 3
4 5 6
7 8 9
2nd Row: 4 5 6
After adding 3 times the first column into the third column, the matrix m is:
1 2 6
4 5 18
7 8 30 3)向量的块操作,其实向量只是一个特殊的矩阵,但是Eigen也为它单独提供了一些简化的块操作,如下三种形式:
获取向量的前n个元素:vector.head(n);
获取向量尾部的n个元素:vector.tail(n);
获取从向量的第i个元素开始的n个元素:vector.segment(i,n);
其用法可参考如下代码段:
#include <Eigen/Dense>
#include <iostream>
using namespace std;
int main()
{
Eigen::ArrayXf v(6);
v << 1, 2, 3, 4, 5, 6;
cout << "v.head(3) =" << endl << v.head(3) << endl << endl;
cout << "v.tail<3>() = " << endl << v.tail<3>() << endl << endl;
v.segment(1,4) *= 2;
cout << "after 'v.segment(1,4) *= 2', v =" << endl << v << endl;
}输出结果为:
v.head(3) =
1
2
3
v.tail<3>() =
4
5
6
after 'v.segment(1,4) *= 2', v =
1
4
6
8
10
6
2、QR分解
Eigen的QR分解非常绕人,它总共提供了下面这些矩阵的分解方式:
| Decomposition | Method | Requirements on the matrix | Speed | Accuracy |
|---|---|---|---|---|
| PartialPivLU | partialPivLu() | Invertible | ++ | + |
| FullPivLU | fullPivLu() | None | – | +++ |
| HouseholderQR | householderQr() | None | ++ | + |
| ColPivHouseholderQR | colPivHouseholderQr() | None | + | ++ |
| FullPivHouseholderQR | fullPivHouseholderQr() | None | – | +++ |
| LLT | llt() | Positive definite | +++ | + |
| LDLT | ldlt() | Positive or negative semidefinite | +++ | ++ |
由于我只用到了QR分解,而且Eigen的QR分解开始使用时确实不容易入手,因此这里只提供了householderQR的分解方式的演示代码:
void QR2()
{
Matrix3d A;
A<<1,1,1,
2,-1,-1,
2,-4,5;
HouseholderQR<Matrix3d> qr;
qr.compute(A);
MatrixXd R = qr.matrixQR().triangularView<Upper>();
MatrixXd Q = qr.householderQ();
std::cout << "QR2(): HouseholderQR---------------------------------------------"<< std::endl;
std::cout << "A "<< std::endl <<A << std::endl << std::endl;
std::cout <<"qr.matrixQR()"<< std::endl << qr.matrixQR() << std::endl << std::endl;
std::cout << "R"<< std::endl <<R << std::endl << std::endl;
std::cout << "Q "<< std::endl <<Q << std::endl << std::endl;
std::cout <<"Q*R" << std::endl <<Q*R << std::endl << std::endl;
}输出结果为:
3、一个矩阵使用的例子:用矩阵操作完成二维高斯拟合,并求取光斑中心
下面的代码段是一个使用Eigen的矩阵操作完成二维高斯拟合求取光点的代码例子,关于二维高斯拟合求取光点的详细内容可参考:
http://blog.csdn.net/hjx_1000/article/details/8490653
http://blog.csdn.net/houjixin/article/details/8492841
from:http://eigen.tuxfamily.org/dox/AsciiQuickReference.txt
Eigen 矩阵定义
#include <Eigen/Dense>
Matrix<double, 3, 3> A; // Fixed rows and cols. Same as Matrix3d.
Matrix<double, 3, Dynamic> B; // Fixed rows, dynamic cols.
Matrix<double, Dynamic, Dynamic> C; // Full dynamic. Same as MatrixXd.
Matrix<double, 3, 3, RowMajor> E; // Row major; default is column-major.
Matrix3f P, Q, R; // 3x3 float matrix.
Vector3f x, y, z; // 3x1 float matrix.
RowVector3f a, b, c; // 1x3 float matrix.
VectorXd v; // Dynamic column vector of doubles
double s;
Eigen 基础使用
// Basic usage
// Eigen // Matlab // comments
x.size() // length(x) // vector size
C.rows() // size(C,1) // number of rows
C.cols() // size(C,2) // number of columns
x(i) // x(i+1) // Matlab is 1-based
C(i,j) // C(i+1,j+1) //
A.resize(4, 4); // Runtime error if assertions are on.
B.resize(4, 9); // Runtime error if assertions are on.
A.resize(3, 3); // Ok; size didn't change.
B.resize(3, 9); // Ok; only dynamic cols changed.
A << 1, 2, 3, // Initialize A. The elements can also be
4, 5, 6, // matrices, which are stacked along cols
7, 8, 9; // and then the rows are stacked.
B << A, A, A; // B is three horizontally stacked A's.
A.fill(10); // Fill A with all 10's.
Eigen 特殊矩阵生成
// Eigen // Matlab
MatrixXd::Identity(rows,cols) // eye(rows,cols)
C.setIdentity(rows,cols) // C = eye(rows,cols)
MatrixXd::Zero(rows,cols) // zeros(rows,cols)
C.setZero(rows,cols) // C = ones(rows,cols)
MatrixXd::Ones(rows,cols) // ones(rows,cols)
C.setOnes(rows,cols) // C = ones(rows,cols)
MatrixXd::Random(rows,cols) // rand(rows,cols)*2-1 // MatrixXd::Random returns uniform random numbers in (-1, 1).
C.setRandom(rows,cols) // C = rand(rows,cols)*2-1
VectorXd::LinSpaced(size,low,high) // linspace(low,high,size)'
v.setLinSpaced(size,low,high) // v = linspace(low,high,size)'
Eigen 矩阵分块
// Matrix slicing and blocks. All expressions listed here are read/write.
// Templated size versions are faster. Note that Matlab is 1-based (a size N
// vector is x(1)...x(N)).
// Eigen // Matlab
x.head(n) // x(1:n)
x.head<n>() // x(1:n)
x.tail(n) // x(end - n + 1: end)
x.tail<n>() // x(end - n + 1: end)
x.segment(i, n) // x(i+1 : i+n)
x.segment<n>(i) // x(i+1 : i+n)
P.block(i, j, rows, cols) // P(i+1 : i+rows, j+1 : j+cols)
P.block<rows, cols>(i, j) // P(i+1 : i+rows, j+1 : j+cols)
P.row(i) // P(i+1, :)
P.col(j) // P(:, j+1)
P.leftCols<cols>() // P(:, 1:cols)
P.leftCols(cols) // P(:, 1:cols)
P.middleCols<cols>(j) // P(:, j+1:j+cols)
P.middleCols(j, cols) // P(:, j+1:j+cols)
P.rightCols<cols>() // P(:, end-cols+1:end)
P.rightCols(cols) // P(:, end-cols+1:end)
P.topRows<rows>() // P(1:rows, :)
P.topRows(rows) // P(1:rows, :)
P.middleRows<rows>(i) // P(i+1:i+rows, :)
P.middleRows(i, rows) // P(i+1:i+rows, :)
P.bottomRows<rows>() // P(end-rows+1:end, :)
P.bottomRows(rows) // P(end-rows+1:end, :)
P.topLeftCorner(rows, cols) // P(1:rows, 1:cols)
P.topRightCorner(rows, cols) // P(1:rows, end-cols+1:end)
P.bottomLeftCorner(rows, cols) // P(end-rows+1:end, 1:cols)
P.bottomRightCorner(rows, cols) // P(end-rows+1:end, end-cols+1:end)
P.topLeftCorner<rows,cols>() // P(1:rows, 1:cols)
P.topRightCorner<rows,cols>() // P(1:rows, end-cols+1:end)
P.bottomLeftCorner<rows,cols>() // P(end-rows+1:end, 1:cols)
P.bottomRightCorner<rows,cols>() // P(end-rows+1:end, end-cols+1:end)
Eigen 矩阵元素交换
// Of particular note is Eigen's swap function which is highly optimized.
// Eigen // Matlab
R.row(i) = P.col(j); // R(i, :) = P(:, i)
R.col(j1).swap(mat1.col(j2)); // R(:, [j1 j2]) = R(:, [j2, j1])
Eigen 矩阵转置
// Views, transpose, etc; all read-write except for .adjoint().
// Eigen // Matlab
R.adjoint() // R'
R.transpose() // R.' or conj(R')
R.diagonal() // diag(R)
x.asDiagonal() // diag(x)
R.transpose().colwise().reverse(); // rot90(R)
R.conjugate() // conj(R)
Eigen 矩阵乘积
// All the same as Matlab, but matlab doesn't have *= style operators.
// Matrix-vector. Matrix-matrix. Matrix-scalar.
y = M*x; R = P*Q; R = P*s;
a = b*M; R = P - Q; R = s*P;
a *= M; R = P + Q; R = P/s;
R *= Q; R = s*P;
R += Q; R *= s;
R -= Q; R /= s;
Eigen 矩阵单个元素操作
// Vectorized operations on each element independently
// Eigen // Matlab
R = P.cwiseProduct(Q); // R = P .* Q
R = P.array() * s.array();// R = P .* s
R = P.cwiseQuotient(Q); // R = P ./ Q
R = P.array() / Q.array();// R = P ./ Q
R = P.array() + s.array();// R = P + s
R = P.array() - s.array();// R = P - s
R.array() += s; // R = R + s
R.array() -= s; // R = R - s
R.array() < Q.array(); // R < Q
R.array() <= Q.array(); // R <= Q
R.cwiseInverse(); // 1 ./ P
R.array().inverse(); // 1 ./ P
R.array().sin() // sin(P)
R.array().cos() // cos(P)
R.array().pow(s) // P .^ s
R.array().square() // P .^ 2
R.array().cube() // P .^ 3
R.cwiseSqrt() // sqrt(P)
R.array().sqrt() // sqrt(P)
R.array().exp() // exp(P)
R.array().log() // log(P)
R.cwiseMax(P) // max(R, P)
R.array().max(P.array()) // max(R, P)
R.cwiseMin(P) // min(R, P)
R.array().min(P.array()) // min(R, P)
R.cwiseAbs() // abs(P)
R.array().abs() // abs(P)
R.cwiseAbs2() // abs(P.^2)
R.array().abs2() // abs(P.^2)
(R.array() < s).select(P,Q); // (R < s ? P : Q)
Eigen 矩阵化简
// Reductions.
int r, c;
// Eigen // Matlab
R.minCoeff() // min(R(:))
R.maxCoeff() // max(R(:))
s = R.minCoeff(&r, &c) // [s, i] = min(R(:)); [r, c] = ind2sub(size(R), i);
s = R.maxCoeff(&r, &c) // [s, i] = max(R(:)); [r, c] = ind2sub(size(R), i);
R.sum() // sum(R(:))
R.colwise().sum() // sum(R)
R.rowwise().sum() // sum(R, 2) or sum(R')'
R.prod() // prod(R(:))
R.colwise().prod() // prod(R)
R.rowwise().prod() // prod(R, 2) or prod(R')'
R.trace() // trace(R)
R.all() // all(R(:))
R.colwise().all() // all(R)
R.rowwise().all() // all(R, 2)
R.any() // any(R(:))
R.colwise().any() // any(R)
R.rowwise().any() // any(R, 2)
Eigen 矩阵点乘
// Dot products, norms, etc.
// Eigen // Matlab
x.norm() // norm(x). Note that norm(R) doesn't work in Eigen.
x.squaredNorm() // dot(x, x) Note the equivalence is not true for complex
x.dot(y) // dot(x, y)
x.cross(y) // cross(x, y) Requires #include <Eigen/Geometry>
Eigen 矩阵类型转换
Type conversion
// Eigen // Matlab
A.cast<double>(); // double(A)
A.cast<float>(); // single(A)
A.cast<int>(); // int32(A)
A.real(); // real(A)
A.imag(); // imag(A)
// if the original type equals destination type, no work is done
// Note that for most operations Eigen requires all operands to have the same type:
MatrixXf F = MatrixXf::Zero(3,3);
A += F; // illegal in Eigen. In Matlab A = A+F is allowed
A += F.cast<double>(); // F converted to double and then added (generally, conversion happens on-the-fly)
// Eigen can map existing memory into Eigen matrices.
float array[3];
Vector3f::Map(array).fill(10); // create a temporary Map over array and sets entries to 10
int data[4] = {1, 2, 3, 4};
Matrix2i mat2x2(data); // copies data into mat2x2
Matrix2i::Map(data) = 2*mat2x2; // overwrite elements of data with 2*mat2x2
MatrixXi::Map(data, 2, 2) += mat2x2; // adds mat2x2 to elements of data (alternative syntax if size is not know at compile time)
Eigen 求解线性方程组 Ax = b
// Solve Ax = b. Result stored in x. Matlab: x = A \ b.
x = A.ldlt().solve(b)); // A sym. p.s.d. #include <Eigen/Cholesky>
x = A.llt() .solve(b)); // A sym. p.d. #include <Eigen/Cholesky>
x = A.lu() .solve(b)); // Stable and fast. #include <Eigen/LU>
x = A.qr() .solve(b)); // No pivoting. #include <Eigen/QR>
x = A.svd() .solve(b)); // Stable, slowest. #include <Eigen/SVD>
// .ldlt() -> .matrixL() and .matrixD()
// .llt() -> .matrixL()
// .lu() -> .matrixL() and .matrixU()
// .qr() -> .matrixQ() and .matrixR()
// .svd() -> .matrixU(), .singularValues(), and .matrixV()
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/180520.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
