大家好,又见面了,我是你们的朋友全栈君。
废话不多说,在我家大宝的指导下一次性成功安装windows和Linux双系统!
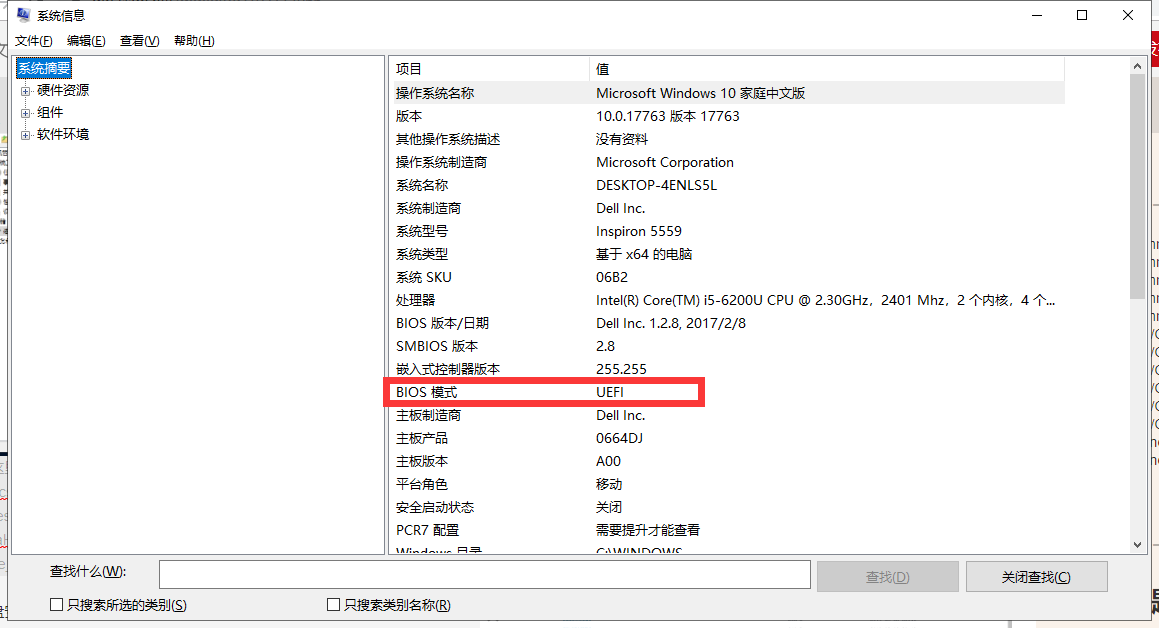
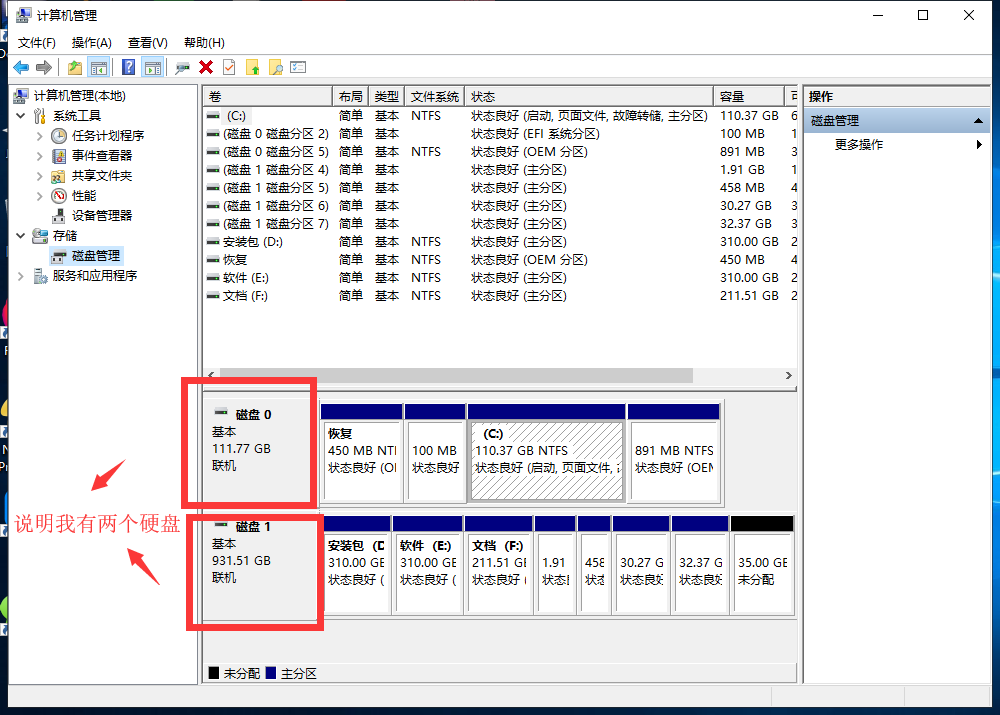
安装前提:1.搞清自己电脑类型,我的是UEFI新式bios+双硬盘(固态硬盘和机械硬盘)。
win+r输入msinfo32回车确认,出现以下信息:

2.win压缩卷,此电脑图标右键-管理-磁盘管理,我压缩的是f盘,压缩空间量为100G。

3.U盘安装系统
*下载win32diskimager-1.0.0-install
*下载https://mirrors.tuna.tsinghua.edu.cn/ubuntu-releases/18.04/


以上两个下载完毕后打开win32diskimager-1.0.0-install进行安装。
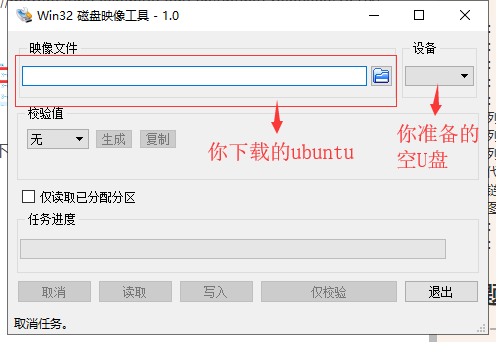
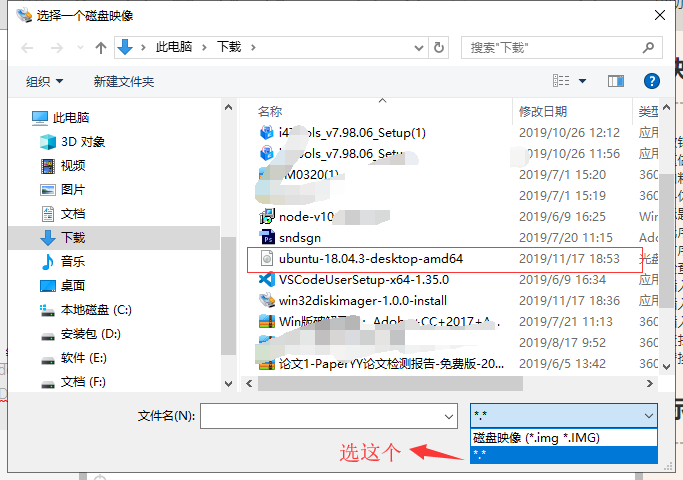
注意:准备的U盘至少4个G,选择映像文件时,类型选‘’
*接下来点击“写入”就可以啦
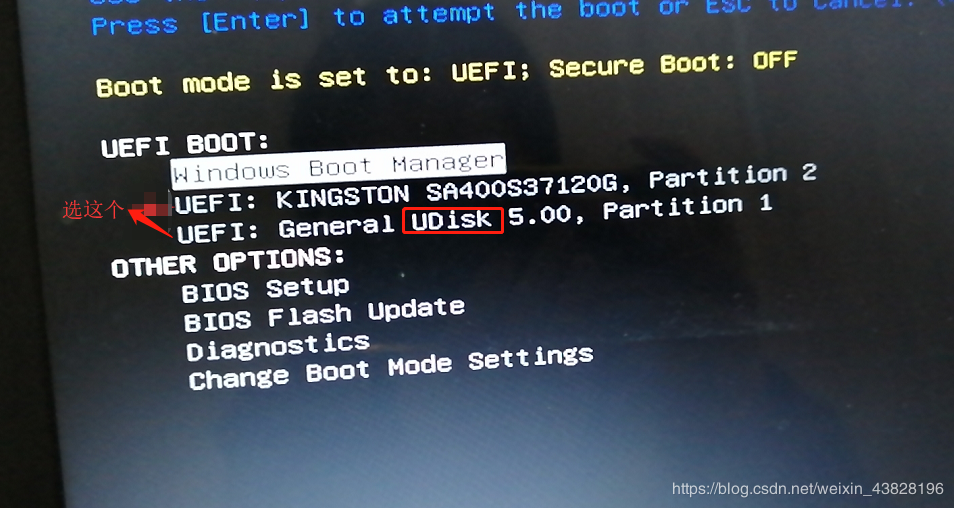
开始安装:
1.电脑关机,插入U盘,再开机,按f12。
选择
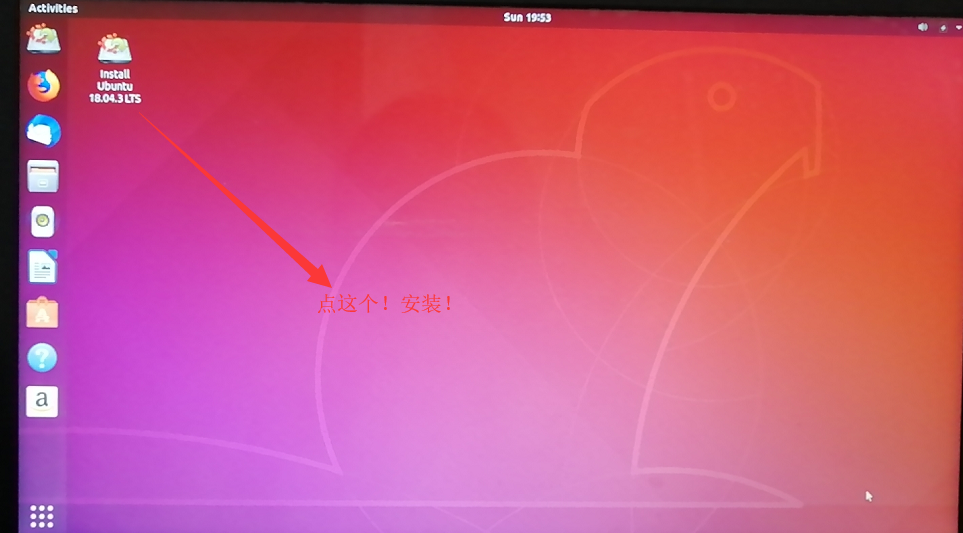
2.之后就进入ubuntu安装界面了
3.选择:其他选项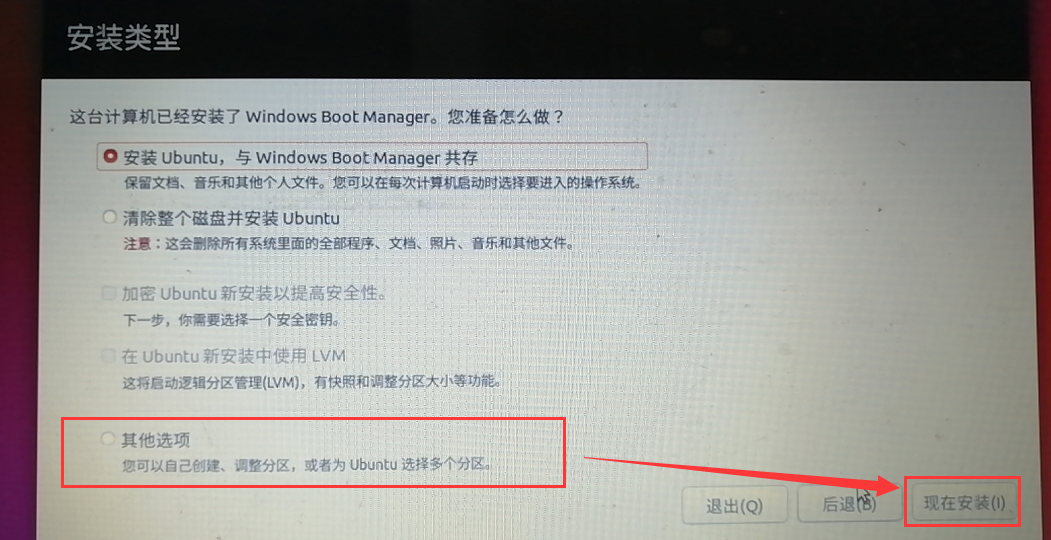
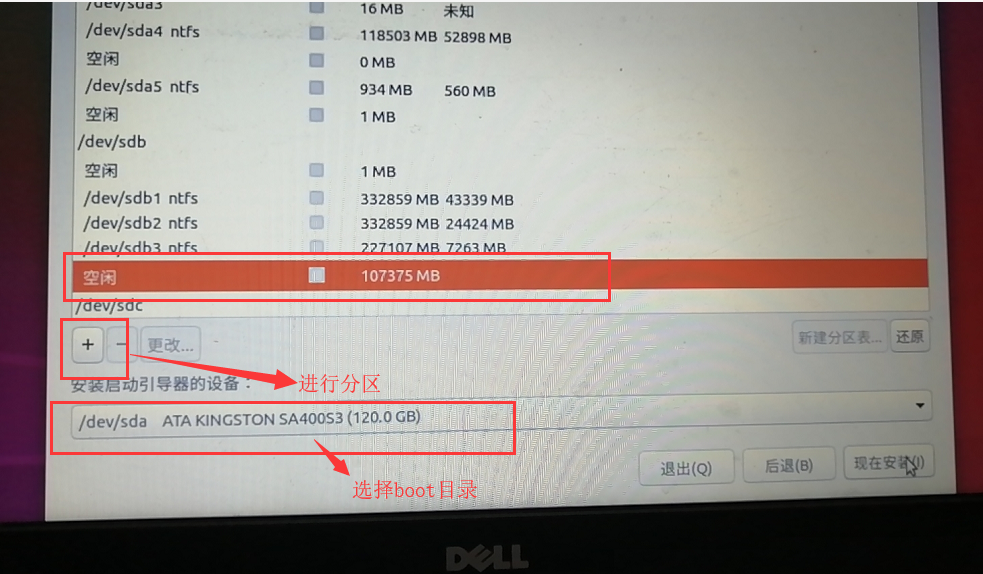
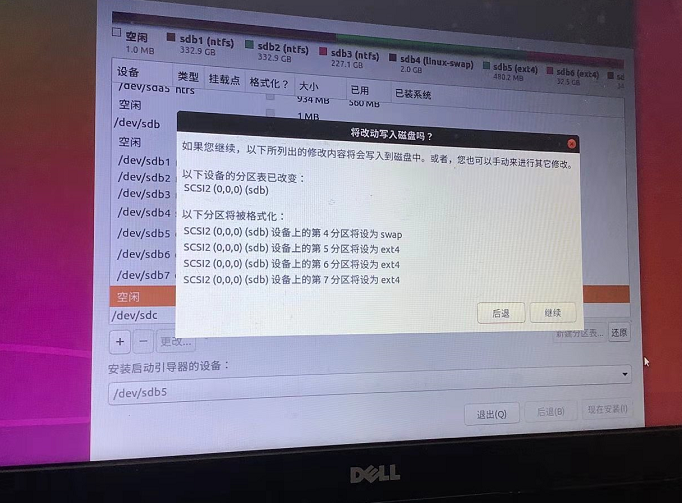
4.关于分区:
我的分区方案如下:
Swap(相当于电脑内存):逻辑分区、大小设置为电脑内存大小,2G,4G;
/boot(引导分区):主分区:大小设置为480M;
/home(用户存储数据用):逻辑分区,要尽可能大,100G空间可以设置为85G,留10G给主分区即可。
/.(主分区):主分区,用于存放系统,相当于windows的C盘,10G即可。
5.点击安装,等待俩分钟就OK啦
6.完事后会提醒你是否要现在重启,重启电脑后,会出现让我们选择进入哪个系统,我们就可以自由选择系统啦
看都看完了,留个赞再走被

发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/163969.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...