大家好,又见面了,我是你们的朋友全栈君。
人工势场法也可以用作机器人避障。我目前思考的是使其作为全局规划器,规划全局路径,也可以做局部规划直接下达至速度计算,目前暂时先看看全局路径计算。它将整个地图环境抽象为势场,机器人同时受到目标点的引力与障碍物的斥力,向合力的方向移动,当机器人逐步接近障碍物,受到的斥力越来越大以致偏离障碍物,达到避障的效果。如果做一个简化,每次计算便向合力方向延伸一个步长,便可逐渐到达终点。
在栅格地图中,障碍物很多,看看栅格地图的说明就知道:
Raw Message Definition
# This represents a 2-D grid map, in which each cell represents the probability of
# occupancy.
Header header
#MetaData for the map
MapMetaData info
# The map data, in row-major order, starting with (0,0). Occupancy
# probabilities are in the range [0,100]. Unknown is -1.
int8[] data
在一幅2000×2000,分辨率为0.02的地图中,动辄有一万以上的障碍物栅格,若是遍历障碍物来寻找当前栅格附近的障碍物的话消耗太大,在此用KD树保存障碍栅格并用K近邻算法找到最近的K个栅格,在此K要足够大以包括进附近的障碍。可以用PCL库的KD树来实现障碍栅格的储存和查找。
当然,障碍物需要设置一个“影响范围”,我们所处的位置如果在某障碍物范围外,即便是K近邻也不该受到其影响。障碍物的斥力可以由万有引力公式求出(与距离平方成反比),而目标点的引力可以与距离成正比也可以是类似重力的恒定值。调节两个受力参数是决定路径效果的一个重要因素。
但是用栅格来代表障碍物,计算量还是太大了,如果对栅格进行预处理,将一平方米的栅格,计算出密度与质心,这样可以将2000×2000的地图转化为40×40的障碍物集合,减少迭代时间。
克服一下懒劲,继续更新。。。
我们将地图处理为点云并将其每一平方米进行降采样(降采样后的点基本上就是质心),再对其进行K近邻查找。代码如下:
#include <ros/ros.h>
#include <nav_msgs/Path.h>
#include <geometry_msgs/PoseStamped.h>
#include <geometry_msgs/PoseWithCovarianceStamped.h>
#include <nav_msgs/OccupancyGrid.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include "tf/tf.h"
#include <tf/transform_broadcaster.h>
using namespace std;
bool updateMap = false;
pcl::PointCloud<pcl::PointXYZ>::Ptr mapCloud(new pcl::PointCloud<pcl::PointXYZ>);
ros::Publisher cloudPub, pathPub;
double searchStep = 0.5;
/* 引力常数与斥力常数 */
double attraction = 10;
double repulsion = 15;
/* 认定到达终点的阈值 */
double goalTolerance = 0.5;
geometry_msgs::PoseStamped tempPose, goalPose;
nav_msgs::Path path;
pcl::KdTreeFLANN<pcl::PointXYZ> kdtree;
void mapCB(const nav_msgs::OccupancyGrid::ConstPtr &map)
{
if(!updateMap)
{
mapCloud->clear();
/* map data */
double origin_x, origin_y, resolution;
int width, height;
origin_x = map->info.origin.position.x;
origin_y = map->info.origin.position.y;
//cout<<origin_x<<origin_y<<endl;
width = map->info.width;
height = map->info.height;
resolution = map->info.resolution;
//cout<<width<<" "<<height<<" "<<resolution<<endl;
pcl::PointXYZ tempPoint;
for(int i = 0; i < width; i++)
{
for(int j = 0; j < height; j++)
{
if(map->data[j * width + i] >= 90)
{
tempPoint.x = i * resolution + origin_x;
tempPoint.y = j * resolution + origin_y;
//cout<<tempPoint.x<<" "<<tempPoint.y<<endl;
mapCloud->push_back(tempPoint);
}
}
}
pcl::PointCloud<pcl::PointXYZ>::Ptr temp_ptr(new pcl::PointCloud<pcl::PointXYZ>);
temp_ptr = mapCloud;
/* down size */
pcl::VoxelGrid<pcl::PointXYZ> sor;
sor.setInputCloud(temp_ptr);
sor.setLeafSize(1, 1, 1);
sor.filter(*mapCloud);
//DEBUG
sensor_msgs::PointCloud2 cloud;
//cout<<"road_cloud_->size() = "<<road_cloud_->size()<<endl;
pcl::toROSMsg(*mapCloud, cloud);
cloud.header.frame_id = "map";
cloudPub.publish(cloud);
updateMap = true;
}
}
void initialCB(const geometry_msgs::PoseWithCovarianceStamped::ConstPtr& pose)
{
ROS_INFO_STREAM("initial");
tempPose.pose = pose->pose.pose;
path.header.frame_id = "map";
path.poses.push_back(tempPose);
}
double distanceToGoal(const geometry_msgs::Pose& currentPose)
{
double distance;
distance = sqrt(pow(currentPose.position.x - goalPose.pose.position.x, 2) + pow(currentPose.position.y - goalPose.pose.position.y, 2));
return distance;
}
double distance(pcl::PointXYZ x1, pcl::PointXYZ x2)
{
double distance;
distance = sqrt(pow(x1.x - x2.x, 2) + pow(x1.y - x2.y, 2));
return distance;
}
void findOrientation(tf::Vector3& cross)
{
pcl::PointXYZ searchPoint;
searchPoint.x = tempPose.pose.position.x;
searchPoint.y = tempPose.pose.position.y;
int K = 20;
std::vector<int> pointIdxNKNSearch(K);
std::vector<float> pointNKNSquaredDistance(K);
double crossX, crossY;
if(kdtree.nearestKSearch(searchPoint, K, pointIdxNKNSearch, pointNKNSquaredDistance) > 0)
{
double currentForceX, currentForceY;
double force;
double forceX, forceY;
double repulsionX = 0, repulsionY = 0;
double attractForce, attractForceX, attractForceY;
for(int i = 0; i < K; i++)
{
/* 计算受力的合力,对于斥力来说模型是类似于电磁力的斥力,与距离平方成反比 */
force = double(repulsion / pow(pointNKNSquaredDistance[i], 2));
forceX = force * (searchPoint.x - mapCloud->points[pointIdxNKNSearch[i]].x) / distance(searchPoint, mapCloud->points[pointIdxNKNSearch[i]]);
forceY = force * (searchPoint.y - mapCloud->points[pointIdxNKNSearch[i]].y) / distance(searchPoint, mapCloud->points[pointIdxNKNSearch[i]]);
repulsionX += forceX;
repulsionY += forceY;
}
/* 对于引力,是与距离成正比的,也就是说可以把环境理解为抛物面模型 */
attractForce = attraction * distanceToGoal(tempPose.pose);
attractForceX = attractForce * (goalPose.pose.position.x - searchPoint.x)/distanceToGoal(tempPose.pose);
attractForceY = attractForce * (goalPose.pose.position.y - searchPoint.y)/distanceToGoal(tempPose.pose);
currentForceX = attractForceX + repulsionX;
currentForceY = attractForceY + repulsionY;
crossX = currentForceX / sqrt(pow(currentForceX, 2) + pow(currentForceY, 2));
crossY = currentForceY / sqrt(pow(currentForceX, 2) + pow(currentForceY, 2));
tf::Vector3 temp(crossX, crossY, 0);
cross = temp;
}
else
{
ROS_ERROR("No neighbor?");
}
}
void goalCB(const geometry_msgs::PoseStamped::ConstPtr& pose)
{
ROS_INFO_STREAM("goal");
goalPose = *pose;
kdtree.setInputCloud(mapCloud);
double distance = distanceToGoal(tempPose.pose);
while(distance > goalTolerance)
{
tf::Vector3 cross;
findOrientation(cross);
tempPose.pose.position.x = tempPose.pose.position.x + searchStep * cross.getX();
tempPose.pose.position.y = tempPose.pose.position.y + searchStep * cross.getY();
path.poses.push_back(tempPose);
distance = distanceToGoal(tempPose.pose);
}
tempPose.pose = pose->pose;
path.poses.push_back(tempPose);
pathPub.publish(path);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "force_path");
ros::NodeHandle n;
pathPub = n.advertise<nav_msgs::Path>("force_path", 1);
cloudPub = n.advertise<sensor_msgs::PointCloud2>("map_cloud", 1);
ros::Subscriber initSub = n.subscribe<geometry_msgs::PoseWithCovarianceStamped>("initialpose", 1, &initialCB);
ros::Subscriber goalSub = n.subscribe<geometry_msgs::PoseStamped>("move_base_simple/goal", 1, &goalCB);
ros::Subscriber mapSub = n.subscribe<nav_msgs::OccupancyGrid>("map", 1, &mapCB);
ros::spin();
return 0;
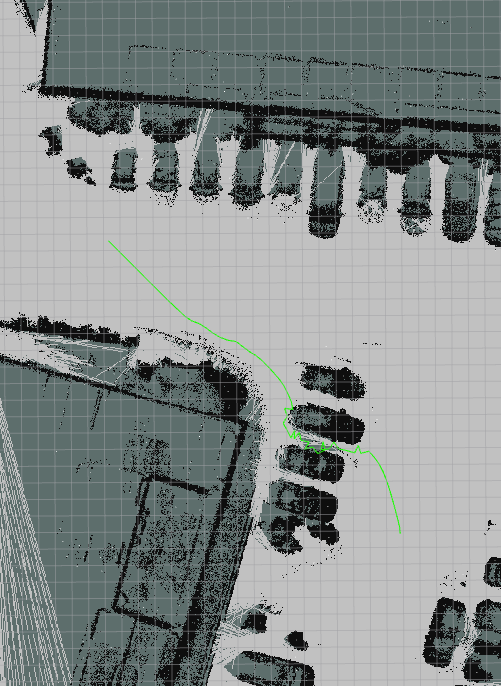
}效果图如下,仅限参考。。。好像引力和斥力常数需要再调整一下,防止震荡。。。各位看官有空还是看一下论文吧。最初提出的论文应该是Oussama Khatib,Real-Time obstacle Avoidance for Manipulators and Mobile Robots. Proc of The 1994 IEEE
以及这一篇http://kovan.ceng.metu.edu.tr/~kadir/academia/courses/grad/cs548/hmws/hw2/report/apf.pdf

发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/150624.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
