大家好,又见面了,我是你们的朋友全栈君。
sympy作为相对比较全的数学计算库,其也包含针对线性代数的符号运算部分,本文着重介绍sympy在处理线性代数相关问题时的使用方法,且基本严格结合线性代数教材(同济大学版),便于大家回顾,如果想了解sympy在初等代数或微积分方面的应用,可以看文章《python之sympy库–数学符号计算与绘图必备》。
一、矩阵运算
1.1 创建矩阵
创建矩阵是使用sympy处理线性代数问题的起点,以下主要介绍通用创建矩阵的方式以及快速创建特殊矩阵的方式,且一部分主要对应于线性代数教材(同济大学版)的第一章和第二章,便于大家结合教材进行快速回顾。
1.1.1 创建矩阵语法
from sympy import * #此处主要为了下面的语法书写方便,实际中还是建议不要全部导入
#创建3×3矩阵
A=Matrix([
[1,2,3],
[4,5,6],
[7,8,9]
])
#创建列向量
a=Matrix([
[1],
[4],
[7]
])
#创建行向量
b=Matrix([1,2,3])1.1.2 创建特殊矩阵
| 特殊矩阵 | 语法 | 说明/示例 |
|---|---|---|
| 单位矩阵 | eye(n) | 创建n×n单位矩阵,比如eye(3),即对角线上全为1的对角矩阵 |
|
0矩阵 |
zeros(shape) | 创建指定形状零矩阵,即矩阵内所有元素全为零,比如zeros(3,4),即创建3行4列的零矩阵 |
| 1矩阵 | ones(shape) | 创建指定形状的1矩阵,即矩阵内所有元素全为1,比如ones(3,4) |
| 对角矩阵 | diag(1,2,3,4···) |
创建对角矩阵,且对角线元素为1,2,3,4··· |
from sympy import *
eye(5) #创建5×5的单位矩阵
zeros(3,4)#创建3行4列的零矩阵
ones(3,4)#创建3行4列的1矩阵
diag(1,2,3)#创建对角线上元素为1,2,3的对角矩阵1.2 矩阵运算
1.2.1 矩阵常规运算
| 矩阵运算 | 语法 | 说明/示例 |
|---|---|---|
| 矩阵的加减 | A+B A-B | 求矩阵A和B的和 |
| 矩阵数乘 | k*A | 求矩阵A的数乘,即k乘A中的每个元素 |
| 矩阵乘 | A*B B*A | 求矩阵A和B的乘,注意乘的顺序,因矩阵不一定满足交换律 |
| 矩阵的幂乘 | A**(n) | 求矩阵的幂乘,此时矩阵需为方阵 |
| 矩阵的逆 |
A.inv() A**(-1) |
求矩阵的逆,A需为方阵 |
| 矩阵的转置 | A.T | 求矩阵的转置 |
| 矩阵代数余子式 | A.cofactor(i,j) | 求矩阵内指定元素的代数余子式,返回一个数值 |
| 矩阵的伴随矩阵 | A.adjugate() | 求矩阵的伴随矩阵,伴随矩阵为矩阵每个元素的代数余子式组成 |
| 矩阵行列式 | A.det() | 求矩阵的行列式,为一个数值 |
| 矩阵的秩 | A.rank() | 返回矩阵A的秩 |
1.2.2 矩阵操作
| 矩阵操作 | 语法 | 说明/示例 |
|---|---|---|
| 取矩阵形状 | A.shape | 返回一个元组,分别为行数和列数 |
| 取矩阵指定行 |
A.row(i) A.row([i1,i2,i3]) |
取矩阵指定行,行号从0开始 取矩阵指定多行 |
| 取矩阵指定列 |
A.col(i) A.col([j1,j2,j3]) |
取矩阵指定列,列号从0开始 取矩阵指定多列 |
| 插入行 | A.row_insert(p,M) | 在A的指定位置插入指定列 |
| 插入列 | A.col_insert(P,M) | 在A的指定位置插入指定行 |
| 删除行 | A.row_del(i) | 删除A的指定行 |
| 删除列 | A.col_del(j) | 删除A的指定列 |
1.2.3 矩阵初等变换
针对矩阵(不一定非得是方阵),一般线性代数教材都是从求解线性方程组引入,线性方程组与对应的系数矩阵及增广矩阵是一一对应的,则对矩阵的消元法即对其增广矩阵的初等变换,因为在使用消元法简化求解线性方程组时,一般是对行进行变换,故对应有以下几种对矩阵的初等变换
- 对某行数乘k
- 交换某两行位置
- 对某行数乘k并加到另一行
而矩阵的乘运算,其本质即对应用对某矩阵的行或列进行初等变换,如A*B,即使用A对B进行行变换,或使用B对A进行列变换
 ,
,
则,A即代表交换第一行与第二行位置,A*B即交换B的第一行和第二行,且设C可逆,C总可以分解为多个如A的矩阵的乘,C*B即对B实施一系列的行初等变换,列变换也同理。
以下为另外两种初等矩阵,对应两种初等变换
- 对某行数乘k,比如对第一行数乘k,对应初等矩阵为
- 对某行数乘k,并加到另一行,比如对第一行加上第三行的3倍,对应初等矩阵为
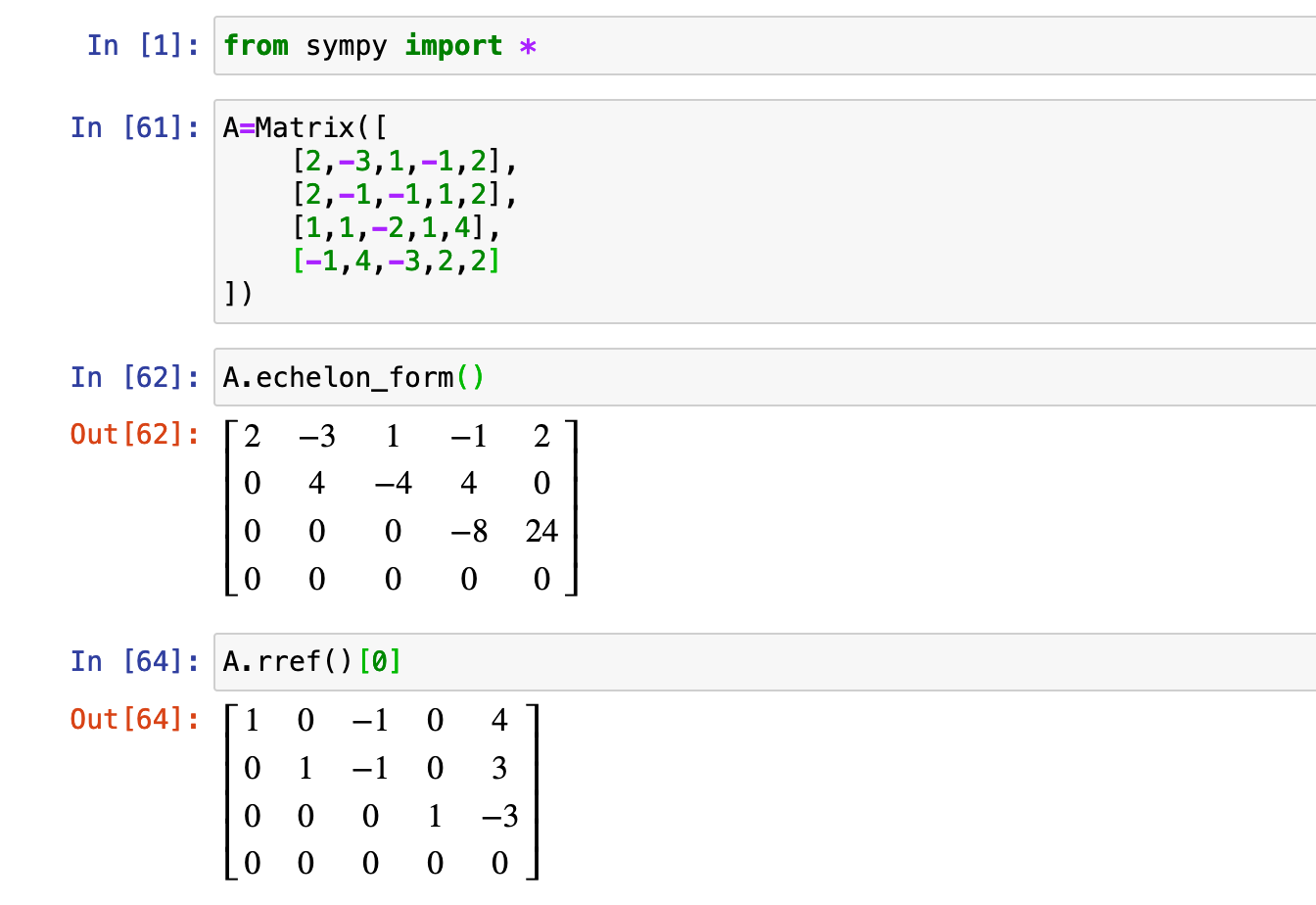
1.2.4 行阶梯、行最简
基于以上对矩阵的初等变换,在没有接触线性代数之前,进行消元法时,最终目标其实是将方程化简为每个方程只含一个未知变量的形式,即转化为简单代数问题,以上使用线性代数的语言,其实即在对增广矩阵进行变换,变为阶梯、最简形,以下即sympy的运算,可直接返回A的以上形式
| 矩阵操作 | 语法 | 说明/示例 |
|---|---|---|
| 行阶梯型 | A.echelon_form() | 返回矩阵A的行阶梯型,阶梯型即每一行的主元所在列的下方元素均为0 |
| 行最简形 | A.rref() | 返回矩阵A的行最简形,即每一行主元为1 |
二、求解线性方程组
以下内容,基本对应于线性代数教材(同济大学版)的第三章,大家可结合教材回顾讨论
2.1 线性方程组可解及性质
本章节主要讨论线性方程组是否有解的讨论,主要结合行列式、矩阵的秩的概念。
2.1.1 秩
在教材中,一般是基于向量组线性相关性,来引入向量组的的秩,进而引入矩阵的秩,且因为矩阵其实可以看成是列向量组,所以本质上向量组的秩与其对应矩阵的秩本质是一样的。
- 向量组的秩:即向量组极大线性无关组内向量的个数
- 矩阵的秩:即最高阶非零子式对应的阶数
- 因矩阵A与矩阵A的最简形具有相同的秩,且A可看成是由行或列向量构成,结合阶梯型的性质(每行的主元下面的元素全为零),可直观的得出A的向量组的秩和矩阵的秩相等
2.1.2 可解性的判断
设线性方程组的系数矩阵为A,增广矩阵为R,形状为(m,n),则对应线性方程组解的情况,如下
| 解的情况 | 判断条件 | 说明/示例 |
|---|---|---|
| 无解 | r(A)<r(R) | 即如果系数矩阵A的秩小于增广矩阵R的秩,则无解,不管是齐次还是非齐次线性方程 |
| 唯一解 | r(A)=r(R)=n |
即系数矩阵A与增广矩阵R的秩相等,且等于未知数个数n 如果是其次线性方程组,唯一解为0解 |
| 无穷多解 | r(A)=r(R)<n | 即系数矩阵A与增广矩阵R的秩相等,且小于未知数个数n |
2.2 矩阵的行空间、列空间、零空间
在此处先引入向量空间的概念,再基于向量空间,讨论线性方程组解的构成
向量空间即对向量加和数乘封闭的空间,以下主要基于齐次线性方程组的系数矩阵A,讨论该矩阵本身独特的三种向量空间
其中,行/列空间基的个数即A的秩r,零空间或解空间基的个数即n-r。
| 矩阵空间 | 对应代码 | 说明/示例 |
|---|---|---|
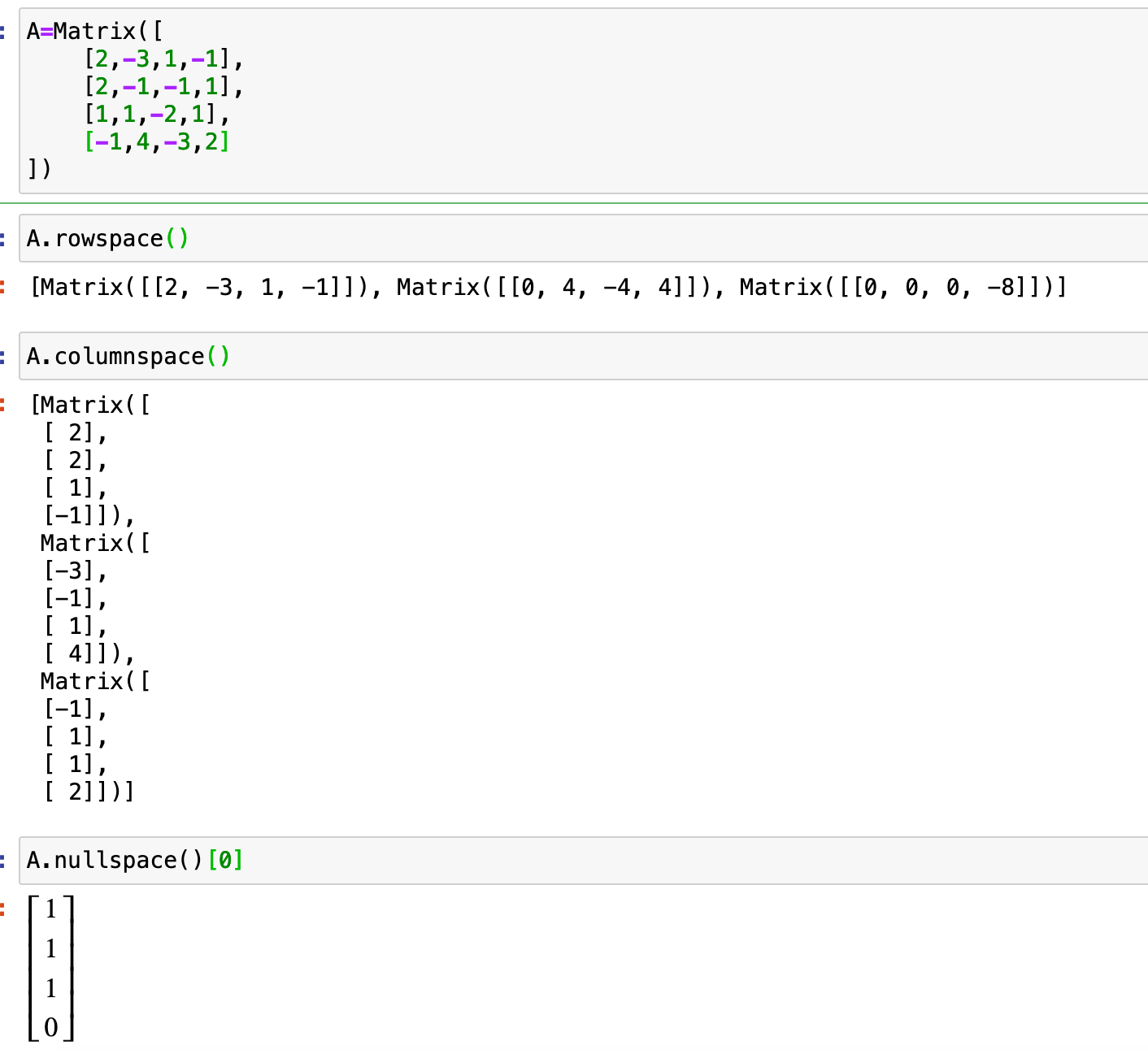
| 矩阵的行空间 | A.rowspace() | 返回矩阵的行向量组的最大线性无关向量组 |
| 矩阵的列空间 | A.columnspace() | 返回矩阵的列向量组的最大线性无关向量组 |
| 矩阵的零空间/解空间 | A.nullspace() | 返回矩阵A 为系数矩阵的其次线性方程组对应的解空间的基,由这些基向量可构成通解 |
2.3 线性方程组解的构成
2.3.1 齐次线性方程组
此处只讨论非零解的情况,即有无穷解,求基础解系(即解空间的基),解空间的基的线性组合即基础解系
如系数矩阵A对应的其次线性方程组
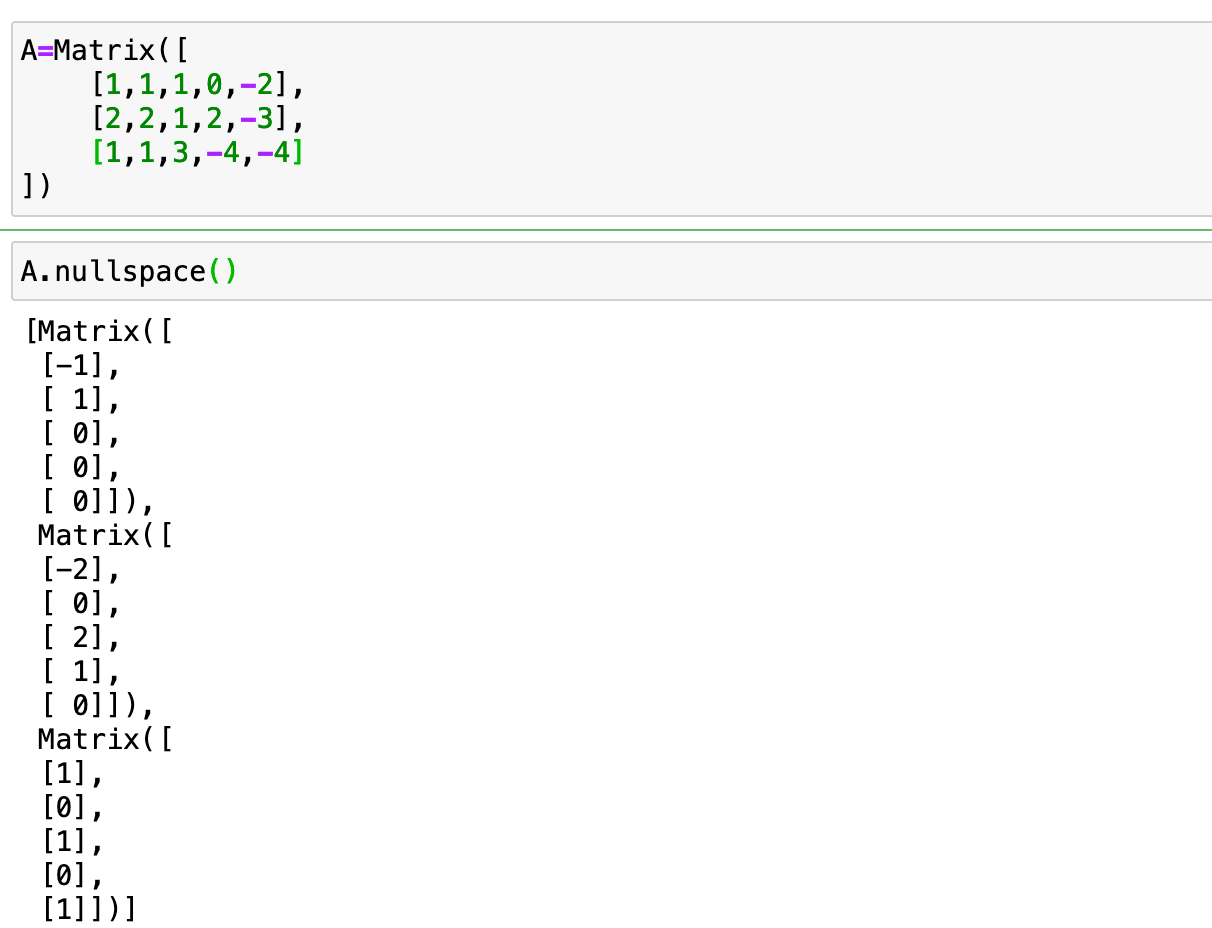
则,A的基础解系即:
2.3.2 非齐次线性方程组
非齐次线性方程组通解,即对应齐次线性方程组的基础解系+特解
齐次线性方程组的基础解析,按照2.3.1直接求出即可,特解可先将增广矩阵变为行最简形,然后设非主元对应的未知数为0,即可直接读出
设A为非齐次线性方程组的系数矩阵,R为对应增广矩阵,则
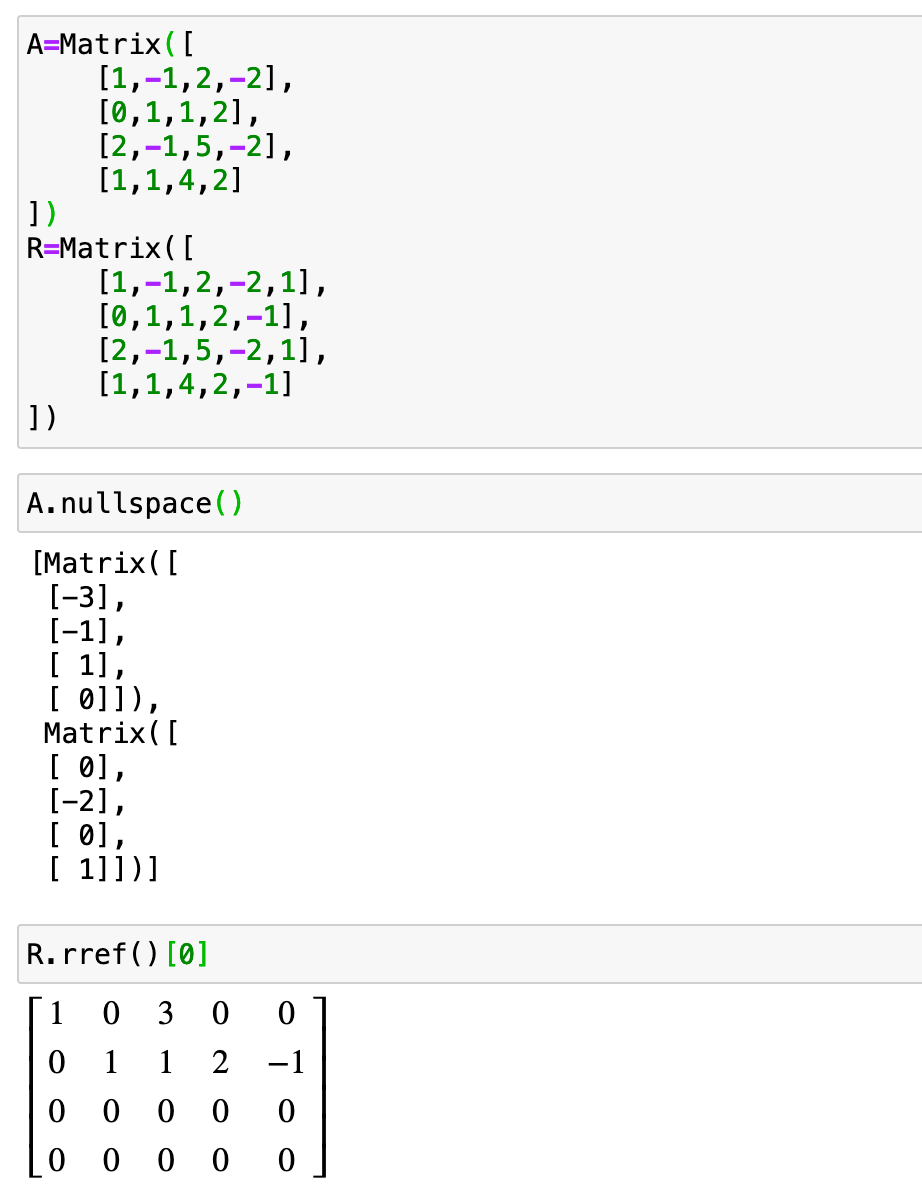
最终,得出该非齐次线性方程组的通解如下
三、矩阵特征向量与特征值
本章节主要对应于线性代数教材(同济大学版)的第四章(相似矩阵及二次型)
3.1 向量运算
| 向量运算 | 语法 | 说明/示例 |
|---|---|---|
| 向量点积 | a.dot(b) | 返回向量a和向量b的点击,等价于a.T*b |
| 向量叉积 | a.cross(b) | 返回向量的叉积,得出的是与A、B均正交的一个向量 |
| 向量的模/长度 | a.norm() | 返回向量的模或长度 |
| 向量单位化 | a.normalized() | 返回向量a的单位向量(即除以其长度) |
| 向量投影 | a.project(b) | 返回向量a在b的投影向量 |
以下作图简单说明下向量的投影、点积之间的关系: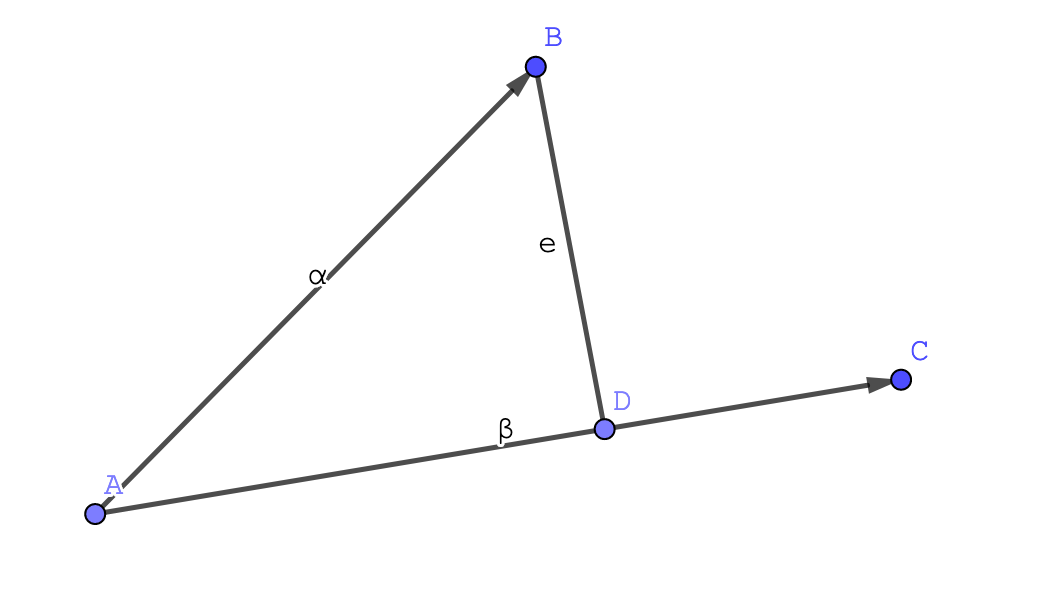
AB为向量,AC为向量,为垂直与AC的线段,在的投影向量为p,设p=k则
e.dot()=0,即(-p).dot()=0,即(-k).dot()=0,即可求出k,进而求出p,如下:
,得出:
则在的投影向量p=k==
以上即向量的投影公式,之所以单独说明投影,是因为其实在进行向量正交化,理解施密特向量正交化公式的关键。
3.2 向量正交化
向量正交化,即将给定的线性无关向量组进行正交化,进而进行单位标准化,因为正交化后,会有相对比较好的性能,比如对由正交的向量组组成的矩阵,
| 向量操作 | 语法 | 说明/示例 |
|---|---|---|
| 向量组正交化 | GramSchmidt([A.col(i)]) | 返回正交化后的向量组,如果第二个参数传入True,则返回的是规范正交化的向量组 |
以上即使用施密特正交化方法进行计算,而施密特正交化,本质则是使用了投影算法,如下
设待正交化的线性无关向量组:
可以发现,针对,其即减去在的投影,对应于3.1中的e,而e肯定与垂直,同理,即减去其在及的投影,即在三维中,垂直于由和组成的平面的向量,其他的以此类推 。
如上,因为同济大学版本的线性代数教材,并未在此处说的很明白,导致看的云里雾里,其实这个公式如果知道了向量投影的概念,自己即可以推导,无需死记硬背。
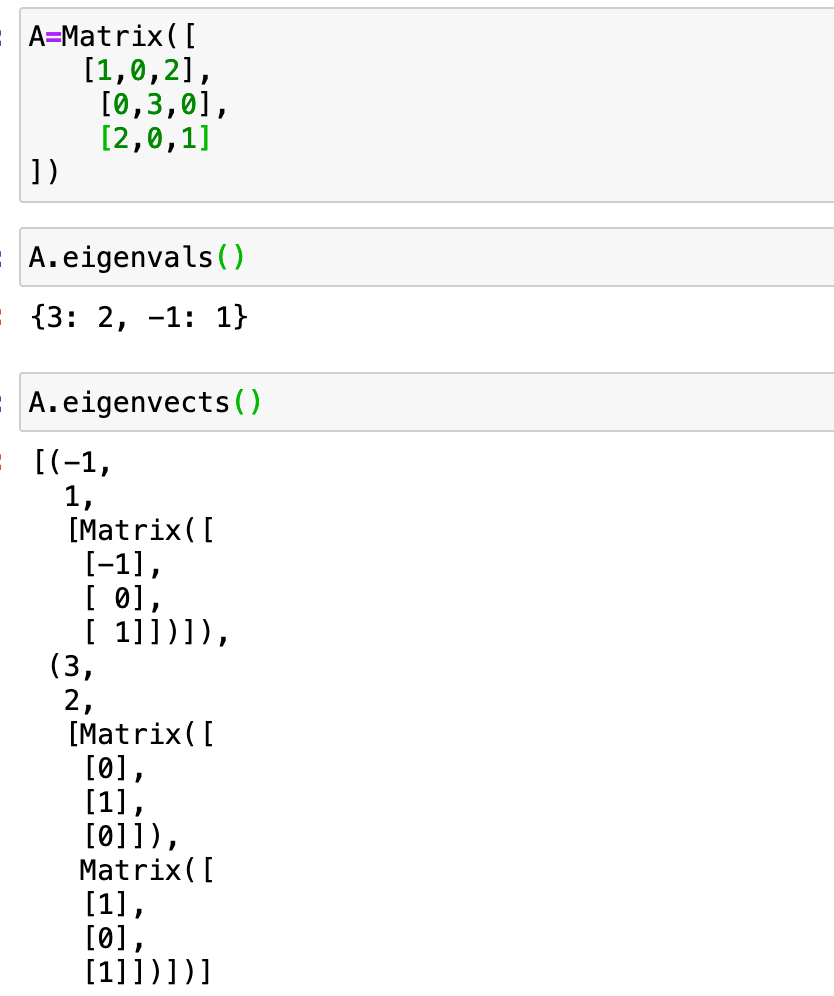
3.3 特征向量与特征值
方阵的特征值和特征向量,在较多领域有很多用处,比如3.4中进行相似对角化,然后简化矩阵的幂乘运算等。
| 运算 | 语法 | 说明/示例 |
|---|---|---|
| 矩阵的特征值 | A.eigenvals() | 求矩阵A对应的特征值,满足Aa=λa |
| 矩阵特征值和特征向量 | A.eigenvects() | 返回矩阵A的特征值及对应的特征向量,使得Aa=λa |
3.4 矩阵相似及相似对角化
矩阵相似的定义为:
则A与B相似,尤其,当B为对角矩阵时,则此时如下:
此时,根据特征值和特征向量公式,可知P为A的特征向量组成的矩阵,为对应特征向量组成的对角矩阵,以上公式即相似对角化公式。
特别的,当A为实对阵矩阵时,因,所以 ,即,所以P需为正交矩阵。至于求正交阵P,使得A可相似对角化,可参照教材中的步骤完成即可。
以下为sympy求解语法
| 运算 | 语法 | 说明/示例 |
|---|---|---|
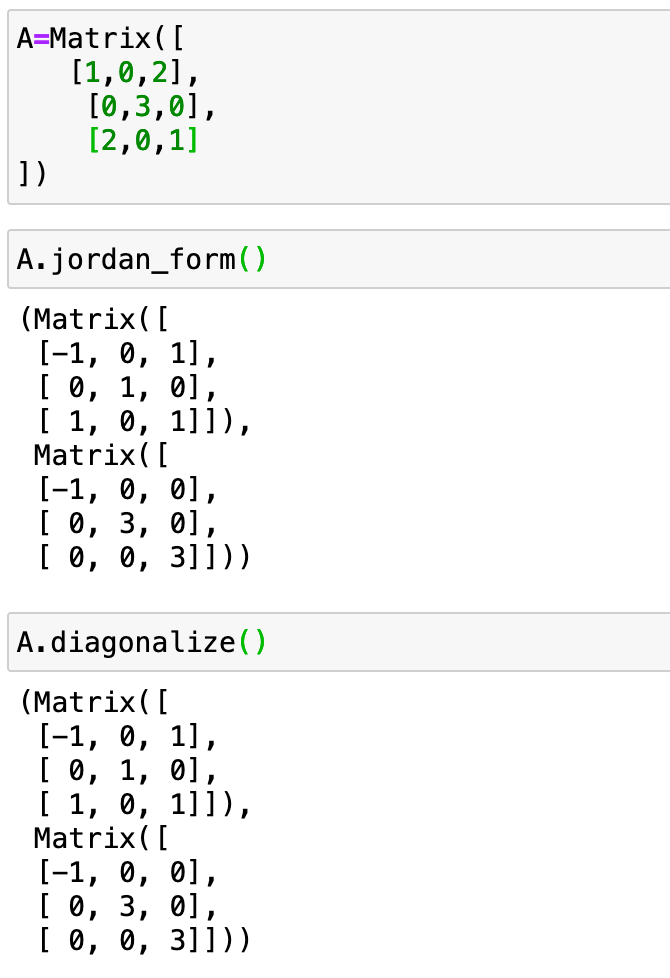
| 矩阵相似对角化 | A.jordan_form() | 返回A的标准型化矩阵及对应的对角矩阵,其中P是对角化矩阵,为A的特征向量组成的矩阵,是对角矩阵,,只针对方阵才有效 |
| 矩阵相似对角化 | A.diagonalize() | 同样返回矩阵P和对角矩阵,一般使用该方法 |
以下,返回的第一个矩阵即P,第二个矩阵即对角矩阵
3.5 矩阵的合同
矩阵的合同是在二次型及其标准型章节引入的,主要是为了对任意二次型化为标准型,可以认为是线性代数在求解或化简二次型的应用
如果存在C,使得,则认为B与A合同,特别的,当A为对称矩阵时,由3.4中可知,总存在正交阵P,使得,A为二次型的系数对称阵,即对应的标准型,此时,
四、线性代数总结
以下为对本文章介绍的整个现象代数归类为几个公式,或者对矩阵的分解公式
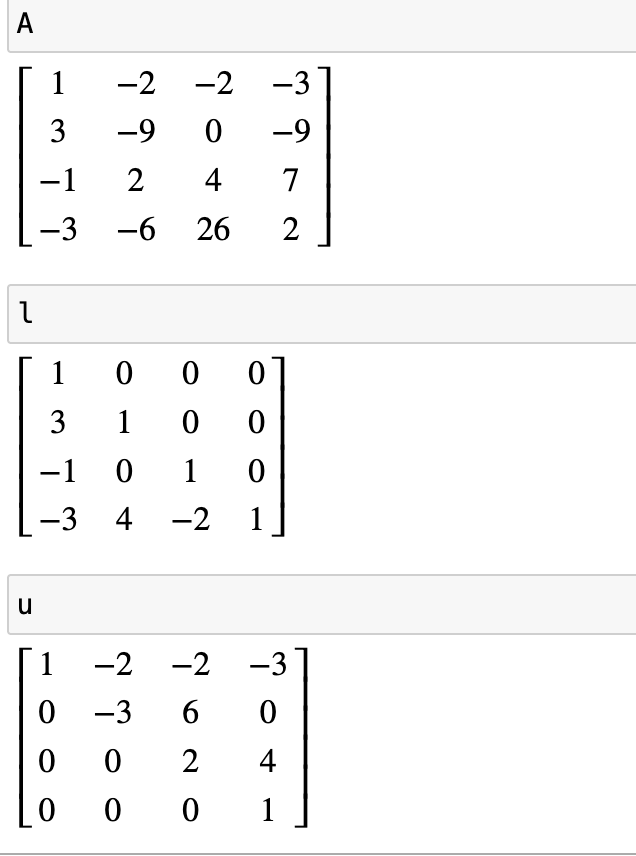
4.1 矩阵的LU分解
根据矩阵的初等变换及消元法,因对任意矩阵,均可以用有限次的行初等变换,将A等价(两个矩阵等价即其秩和解相同)变换为行阶梯型,再对该行阶梯型用有限次的列变换,变为对角型。
我们约定
- 在进行行变换时,总是从第一行开始,第二行用第一行将第一个元素变为0,第三行一次类推,则该组合的初等变换对应于一个下三角矩阵,且可逆,最终得到一个行阶梯型
- 同样的,在对得到的行阶梯型进行列变换时,也是从第一列开始,依次类推,最终变为对角型,且该组合的初等列变换对应于一个上三角矩阵,且可逆。
故有或
以上即对矩阵A的LU分解的理解,sympy的语法如下:
| 矩阵操作 | 语法 | 说明/示例 |
|---|---|---|
| 矩阵LU分解 | l,u,p = A.LUdecomposition() | 将矩阵A分解为下三角矩阵L和上三角矩阵U |
4.2 矩阵的相似对角化分解
矩阵的特征值和特征向量,本质都在为矩阵的相似对角化做准备,此时
将A相似对角化或者相似对角分解后,对求A的高次幂很有帮助,此时
4.3 矩阵的合同对角化分解
矩阵的合同对角化,本质是基于对矩阵的相似对角化的分解,且A如果为实对称矩阵,得出的分解,性能更加优良
,因P为正交阵,故,此时无需求矩阵的逆,即可进行矩阵分解
以上,线性代数的基础知识已经讲解的差不多了,但是线性代数的实际应用场景和技巧非常多,如果想更好的掌握线性代数,仍需在实际问题中大量练习和运用,且如果感兴趣,还可以持续关注线性代数领域新的研究成果和进展,当然,对于应付大学考试等,截至目前的知识已经足够了。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/146640.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
