
大家好,又见面了,我是你们的朋友全栈君。
本文利用跟踪微分器(TD)+ 扩张状态观测器(ESO)+ 非线性 PID 实现了受外扰的未知系统的控制,使得受控系统输出了期望的信号。
无超调,无震颤,参数好调节,堪称完美控制器!!!
什么是自抗扰控制
自抗扰技术的提出是为了解决PID控制技术的几个缺点:
- 要求缓变的输出变量跟踪跳变的控制目标是不合理的;
- 误差的微分信号不好提取, 易受噪声影响;
- P、I、D的线性组合不是最优的组合方式;
- 误差积分I的引入带来很多副作用, 比如使得闭环变得迟钝、产生震荡等.
针对以上问题, 在自抗扰控制中分别使用以下策略来克服:
- 安排控制目标的“过渡过程”;
- 使用跟踪微分器(Tracking Differentiator, TD)提取“微分”;
- 寻找合适的非线性组合;
- 使用
扩张状态观测器来估计总扰动.
以上四点中, 1和3可以视为工程上的优化策略, 而2和4的核心技术都是跟踪微分器.
跟踪微分器的功能为: 输入信号 v ( t ) v(t) v(t), 输出 n n n个信号 z 1 ( t ) , … , z n ( t ) z_1(t),\ldots,z_n(t) z1(t),…,zn(t). 其中 z 1 ( t ) z_1(t) z1(t)跟踪信号 v ( t ) v(t) v(t), 而 z i ( t ) = z ˙ i − 1 ( t ) , i = 2 , 3 , … , n z_i(t)=\dot{z}_{i-1}(t), i=2,3,\ldots,n zi(t)=z˙i−1(t),i=2,3,…,n.
扩张状态观测器本质上也是一个跟踪微分器.
自抗扰控制中主要讨论的控制对象为受外扰的不确定对象:
x ( n ) = f ( x , x ˙ , … , x ( n − 1 ) , t ) + w ( t ) + u ( t ) x^{(n)} = f(x,\dot{x},\ldots,x^{(n-1)},t) + w(t) + u(t) x(n)=f(x,x˙,…,x(n−1),t)+w(t)+u(t)其中 f ( x , x ˙ , … , x ( n − 1 ) , t ) f(x,\dot{x},\ldots,x^{(n-1)},t) f(x,x˙,…,x(n−1),t)为未知函数, w ( t ) w(t) w(t)为未知的外扰, u ( t ) u(t) u(t)为控制量.
通常把 x , x ˙ , … , x ( n − 1 ) x,\dot{x},\ldots,x^{(n-1)} x,x˙,…,x(n−1)作为系统状态, 而扩张状态就是把 x ( n ) x^{(n)} x(n)也视为系统状态.
若 y = x ( t ) y = x(t) y=x(t)为观测量, 那么 x ˙ , … , x ( n ) \dot{x},\ldots,x^{(n)} x˙,…,x(n)就是观测量的各阶导数. 利用跟踪微分器, 可以直接根据 y y y将系统的各阶导数估计出来, 即实现了扩张状态的观测.
而估计出 x ( n ) x^{(n)} x(n)等价于将系统的未知动态 f ( x , x ˙ , … , x ( n − 1 ) , t ) f(x,\dot{x},\ldots,x^{(n-1)},t) f(x,x˙,…,x(n−1),t)和外扰 w ( t ) w(t) w(t)的总和估计出来了.
系统的未知动态和外扰之和称为总扰动.
在控制量 u ( t ) u(t) u(t)中将系统的总扰动抵消, 配合误差反馈, 就实现了自抗扰控制.
龙格库塔
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
def dxdt(F, X, t, h=1e-2):
assert(len(F)==len(X))
X = np.array(X)
K1 = np.array([f(X, t) for f in F])
dX = h*K1/2
K2 = np.array([f(X+dX, t+h/2) for f in F])
dX = h*K2/2
K3 = np.array([f(X+dX, t+h/2) for f in F])
dX = h*K3
K4 = np.array([f(X+dX, t+h) for f in F])
dX = (K1 + 2*K2 + 2*K3 + K4)*h/6
return dX, np.array([f(X, t) for f in F])
辅助函数
def sat(x, delta):
return x/delta if np.abs(x)<delta else np.sign(x)
def fal(x, alpha=0.5, delta=0.1):
return x/np.power(delta,1-alpha) if np.abs(x)<delta else np.power(np.abs(x), alpha)*np.sign(x)
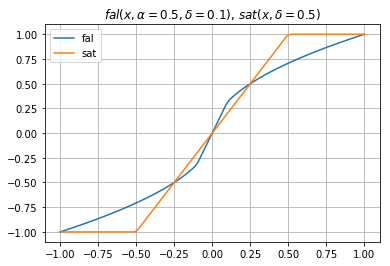
fal 函数具有小误差时高增益,大误差是低增益的特性,对抑制震颤发挥了重要作用。
跟踪微分器
期望输出为方波信号 v ( t ) v(t) v(t)
# target signal
def v(t):
if t < 10:
return np.sign(np.sin(0.8*t))
elif t < 20:
return 2*(0.5*t-int(0.5*t)-0.5)
else:
return np.sin(0.8*t)
def v1(X, t):
x1, x2 = X[0], X[1]
return x2
def v2(X, t):
x1, x2 = X[0], X[1]
return -R*sat(x1 - v(t) + np.abs(x2)*x2/(2*R), delta)
扩张状态观测器
# eso
# 极点配置
p = np.poly1d([-15,-15,-15],True)
_, b1, b2, b3 = tuple(p.coef)
def g1(X, t):
x1,x2,x3 = X[0], X[1], X[2]
return x2 - b1 * (x1 - y) # y is model output
def g2(X, t):
x1, x2, x3 = X[0], X[1], X[2]
return x3 - b2 * (x1 - y) + u
def g3(X, t):
x1, x2, x3 = X[0], X[1], X[2]
return -b3 * (x1 - y)
未知真实状态
x ¨ = − x 3 − x − 0.2 x ˙ + w ( t ) + u ( t ) \ddot{x} = -x^3-x-0.2\dot{x} + w(t) + u(t) x¨=−x3−x−0.2x˙+w(t)+u(t)
其中 w ( t ) w(t) w(t) 为外部扰动, u ( t ) u(t) u(t) 为控制输入。
# hidden uncertain model
def f1(X, t):
x, y = X[0], X[1]
return y
def f2(X, t):
x, y = X[0], X[1]
return -x*x*x - x -0.2*y + w(t) + u
def w(t):
return 0.2 * np.sign(np.cos(t)) # perturbation
控制仿真
R = 90 # params in sal
delta = 0.001 # params in sal
h = 0.01 # discrete time unit
T = 20 # total time
N = int(T/h) # num of points
V = [0., 0.] # TD signal
X = [0., 0.] # true state
Z = [0., 0., 0.] # ESO
u = 0 # initial control input
actual_output = []
expect_output = []
uncertain_dynamics = []
for i in range(N):
t = i*h # time
dX, _ = dxdt([f1,f2],X,t,h)
X = X + dX
y = X[0] # model output
dV, _ = dxdt([v1,v2],V,t,h)
V = V + dV
dZ, _ = dxdt([g1,g2,g3],Z,t,h)
Z = Z + dZ
e_p = V[0] - Z[0]
e_d = V[1] - Z[1]
fep, fed = fal(e_p), fal(e_d)
u = 10*fep + 50*fed - Z[2]
actual_output.append(y)
expect_output.append(V[0])
uncertain_dynamics.append(Z[2])
plt.plot(actual_output, color='black', label='output')
plt.plot(expect_output, color='red', linestyle='--',label='expect')
plt.plot(uncertain_dynamics, color='green', linestyle='--',label='uncertain state')
plt.legend(loc='lower right')
plt.show()
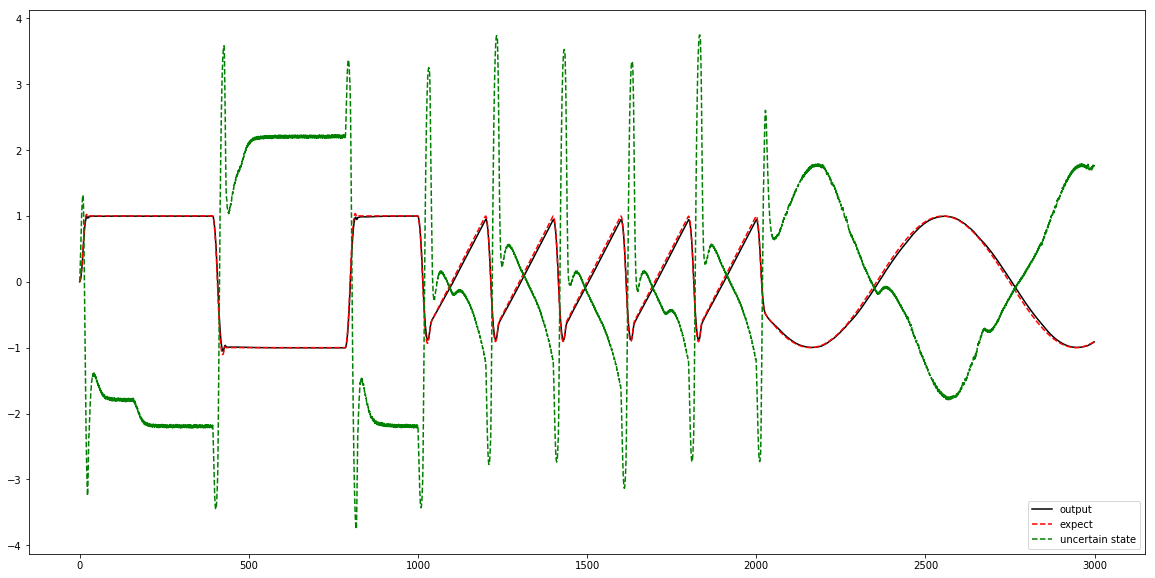
妈妈再也不用担心我调不好PID啦?
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/144673.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...