大家好,又见面了,我是你们的朋友全栈君。
simulink实现模糊PID控制
simulink实现模糊PID控制的资源链接如右:simulink实现模糊PID控制资源
LabVIEW实现模糊PID控制可参考博客:LabVIEW实现模糊PID控制博客
模糊系统建立
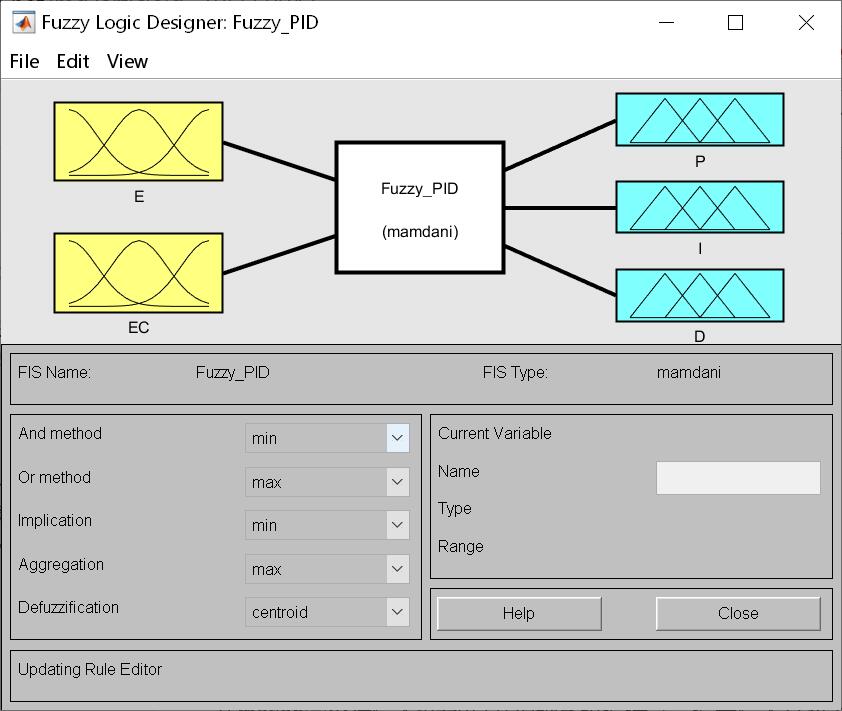
在matlab命令行输入fuzzy打开模糊系统设计器,设定输入个数为2,范围均为[-3,3],输出个数为3,范围均为[-1,1],模糊系统如下图。根据相关文献定义规则,将建立好的模糊文件命名为Fuzzy_PID并保存到本地文件中,用于下一步的导入。

simulink实现
主程序设计
通过阶跃函数模拟输入信号,将输入信号分别传入自带PID模块与编写的模糊PID模块,将两个模块的控制结果及阶跃信号值通过scope函数进行展示,整体程序框图如下。
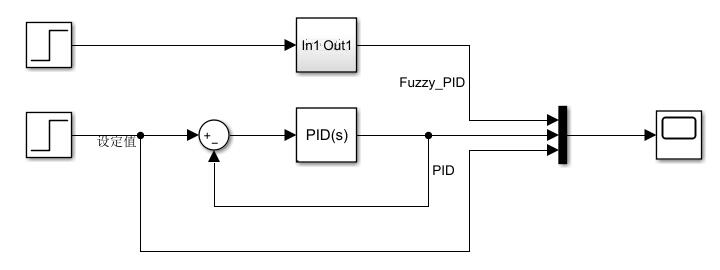
PID模块参数设置为P:0.05,I:0.01,D:0.005。
模糊PID模块
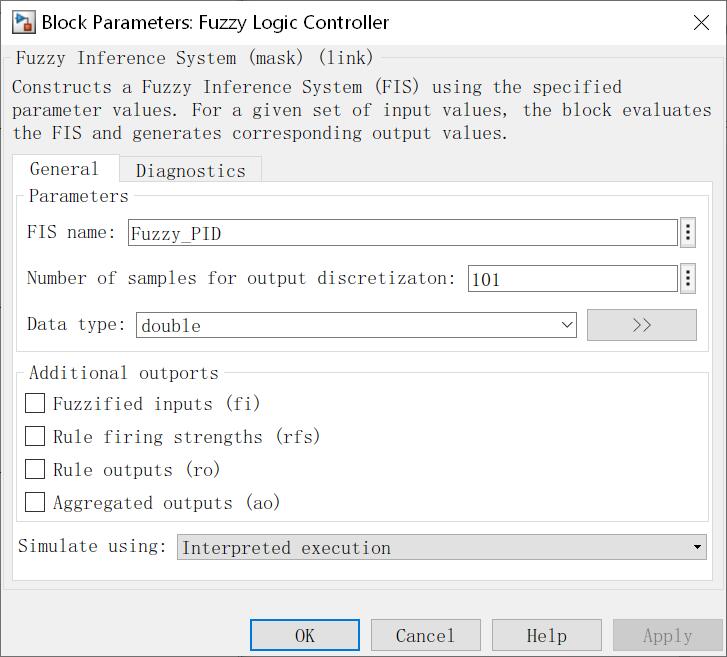
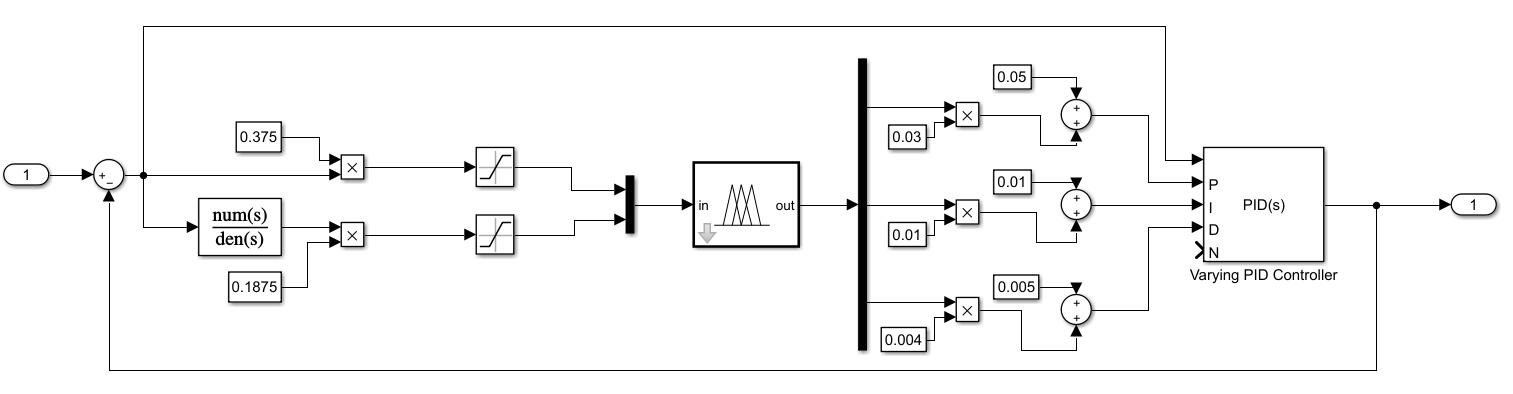
将阶跃信号传入系统,系统通过反馈计算误差及误差变化率,将误差及误差变化率乘以各自的量化因子,模糊系统的误差及误差变化率的值域均为[-3,3],假设实际的误差范围为[-8,8],误差变化率范围为[-16,16],则量化因子分别为0.375和0.1875。量化后的值通过saturation函数处理后传入模糊系统,模糊系统设定如下图,其中Fuzzy_PID应在命令行通过如下语句导入到系统中。
Fuzzy_PID = readfis(‘Fuzzy_PID’)
模糊系统设定输出的范围均为[-1,1],因此也应根据相关经验乘以量化因子,并与初始PID参数,即P:0.05,I:0.01,D:0.005求和,处理后的参数传入PID系统中,结合了模糊规则及PID控制的系统即为模糊PID控制系统,系统的程序框图如下。
结果展示
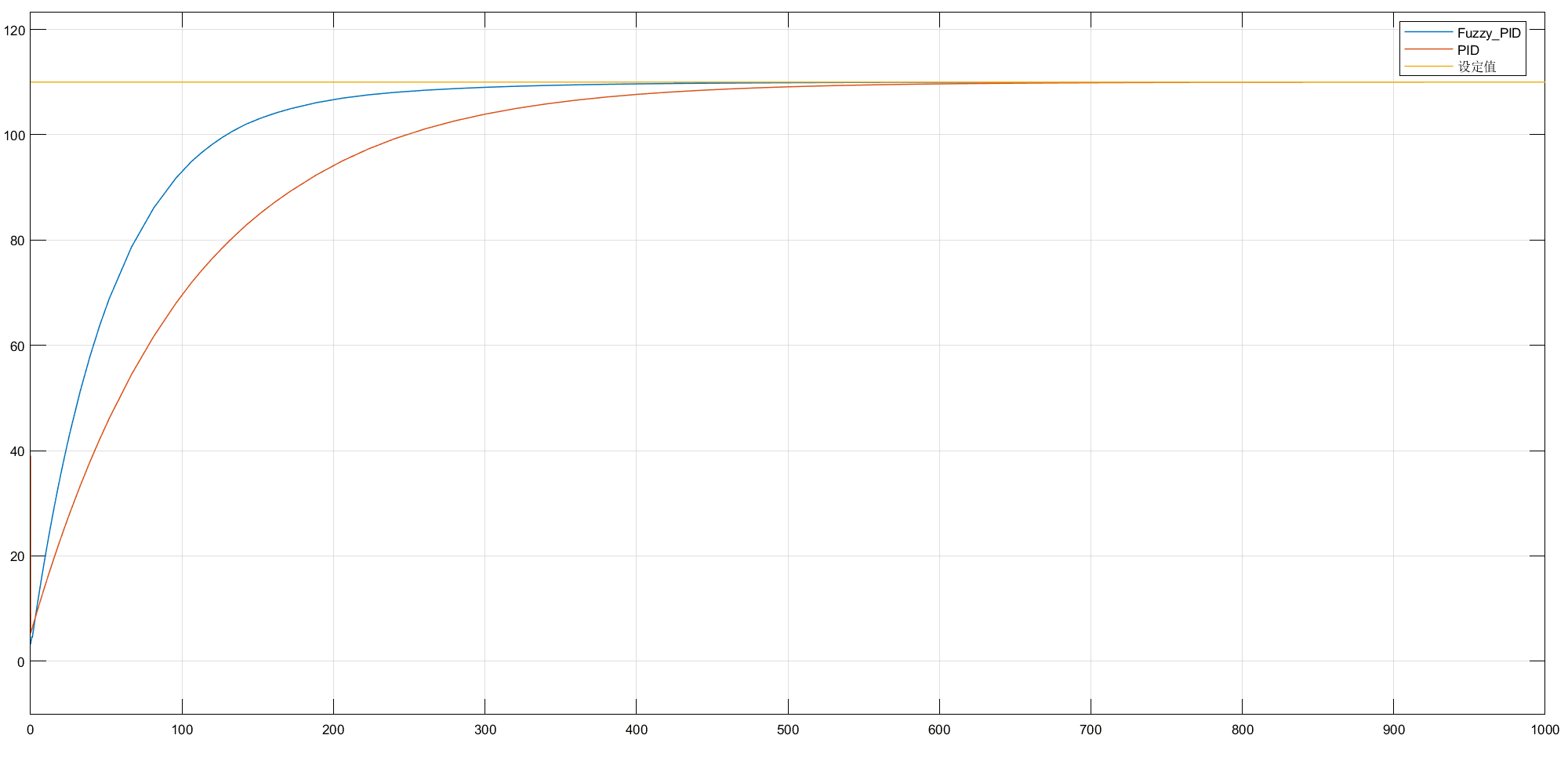
运行程序,点击scope可查看运行结果如下图,可以看出模糊PID比单独PID更早到达设定值,具有更好的响应速度。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/142889.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
