大家好,又见面了,我是你们的朋友全栈君。
线性代数学习笔记(三):
矩阵的理解之— 矩阵的秩与行列式
文章目录
一、矩阵乘法
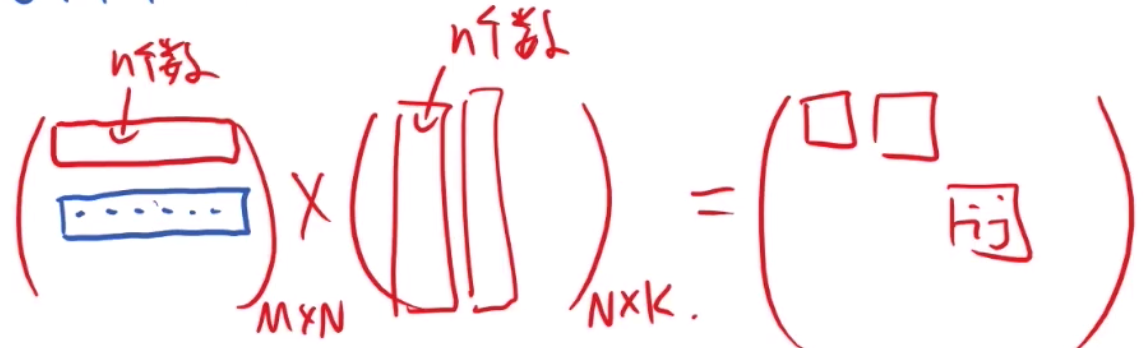
m ∗ n 的 矩 阵 A m ∗ n 乘 以 n ∗ k 的 矩 阵 B n ∗ k 得 到 新 的 矩 阵 C , 是 一 个 m ∗ k 大 小 的 矩 阵 。 m*n的矩阵A_{m*n}乘以 n*k 的矩阵B_{n*k}得到新的矩阵C,是一个m*k大小的矩阵。 m∗n的矩阵Am∗n乘以n∗k的矩阵Bn∗k得到新的矩阵C,是一个m∗k大小的矩阵。
C i j = ∑ a = 1 n A i a ∗ B a j C_{ij}=\displaystyle\sum_{a=1}^{n} A_{ia}*B_{aj} Cij=a=1∑nAia∗Baj

- 矩阵乘法运算:
- 结合律成立: ( A B ) C = A ( B C ) (AB)C=A(BC) (AB)C=A(BC)
- 数乘运算: A m ∗ n = k ∗ B m ∗ n , 则 A i j = k ∗ B i j A_{m*n}=k*B_{m*n},则A_{ij}=k*B_{ij} Am∗n=k∗Bm∗n,则Aij=k∗Bij
- 交换律不成立: B A ≠ A B BA≠AB BA=AB
- 矩阵的红线:
1)矩阵不可消去!
2)矩阵不可交换!
矩阵运算构成环。
矩阵运算是封闭的!
- 那如何理解矩阵呢?
从线性空间的角度去思考:
矩阵是线性空间中的线性变换。
二、矩阵的秩
2.1. 初等变换
任何一个混乱矩阵都能通过初等变换得到一个上三角矩阵或下三角矩阵。
通过初等变换,可以很容易得到矩阵的秩。
(初等变换不会改变矩阵的秩)。
如图示:
- 初等变换的规则:
(1)对调某两行/列;
(2)对某行/列乘以系数k;
(3)对某一行/列加上(减去)某一行/列的k倍。
使之变成一个上三角矩阵或下三角矩阵。
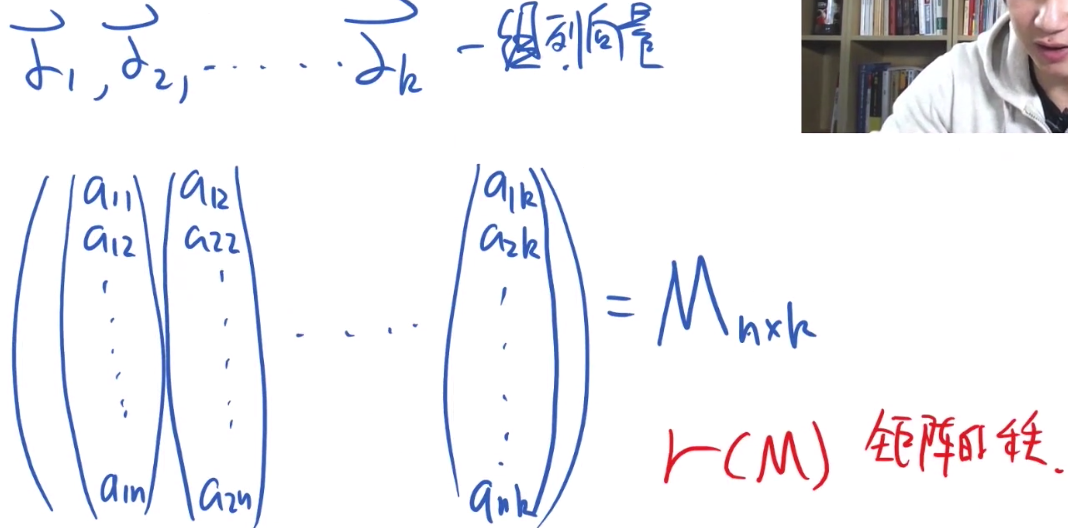
2.2. 秩
利用初定变换的规则,我们可以求出一个矩阵的最大线性无关组,最终目的是引出对“秩”的理解和定义。
把矩阵放到线性空间中,用线性空间的宏观角度能够更好的理解矩阵及矩阵的秩。
- 什么是矩阵的秩?
理解线性空间中的线性相关和线性无关的概念后,秩的概念就会很容易的理解和得出。
参见线性代数学习笔记(一):线性空间的理解
三、矩阵的常见运算
3.1. 矩阵的转置
转置-T: M T = M i ∗ j − 1 = M j ∗ i M^T=M^{-1}_{i*j}=M_{j*i} MT=Mi∗j−1=Mj∗i
转置的性质:
( A B ) T = B T A T (AB)^T=B^TA^T (AB)T=BTAT 、 ( A B C ) T = C T B T A T (ABC)^T=C^TB^TA^T (ABC)T=CTBTAT
- 厄米矩阵:
满足 M n ∗ n = M T ‾ M_{n*n}=\overline{M^T} Mn∗n=MT的矩阵叫厄米矩阵。
可测量的物理量都是厄米矩阵。
下图是一个常见的厄米矩阵:

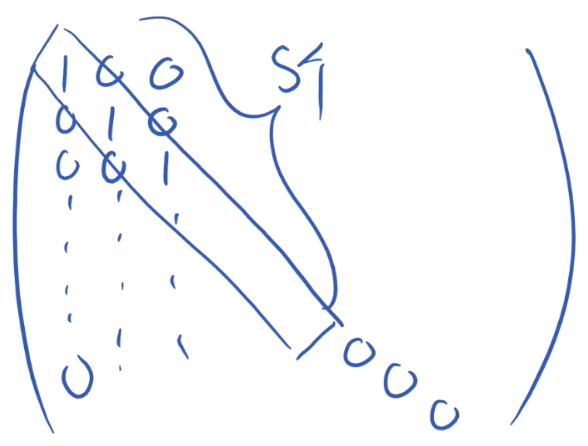
3.2. 矩阵的逆
逆矩阵: A − 1 A = A A − 1 = I = A^{-1}A=AA^{-1}=I= A−1A=AA−1=I=
[ 1 0 . . . 0 0 1 . . . 0 . . . . . . 1 . . . 0 0 0 1 ] (1) \left[ \begin{matrix} 1& 0 &…& 0\\ 0 & 1 &… & 0\\ … & … & 1 &…\\ 0 & 0 & 0 &1 \end{matrix} \right] \tag{1} ⎣⎢⎢⎡10...001...0......1000...1⎦⎥⎥⎤(1)
逆矩阵的性质:
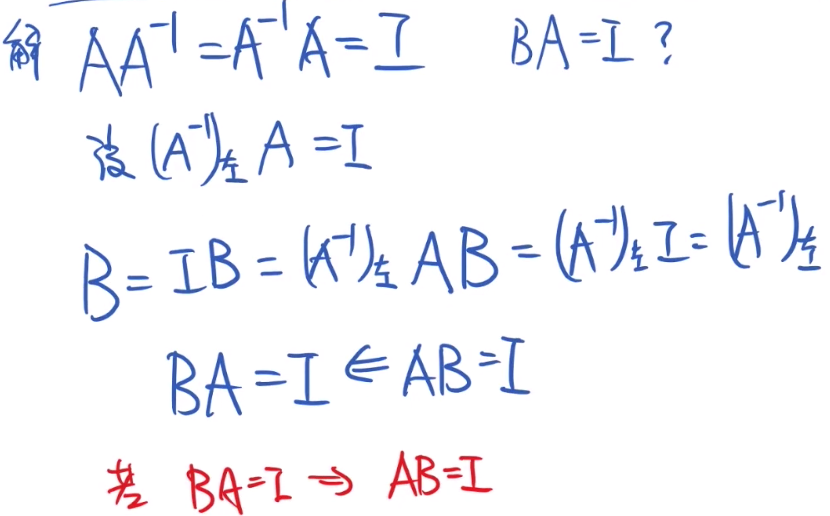
1) A B = I → B A = I AB=I \to BA=I AB=I→BA=I [互逆矩阵可交换]
2) 若 A B = I AB=I AB=I(A、B都是n阶方阵),则A、B互逆。
3) ( A B ) − 1 = B − 1 A − 1 (AB)^{-1}=B^{-1}A^{-1} (AB)−1=B−1A−1, ( A B C ) − 1 = C − 1 B − 1 A − 1 (ABC)^{-1}=C^{-1}B^{-1}A^{-1} (ABC)−1=C−1B−1A−1
4) A满秩是A可逆的充分必要条件。
3.3. 常见运算的相关证明题
-
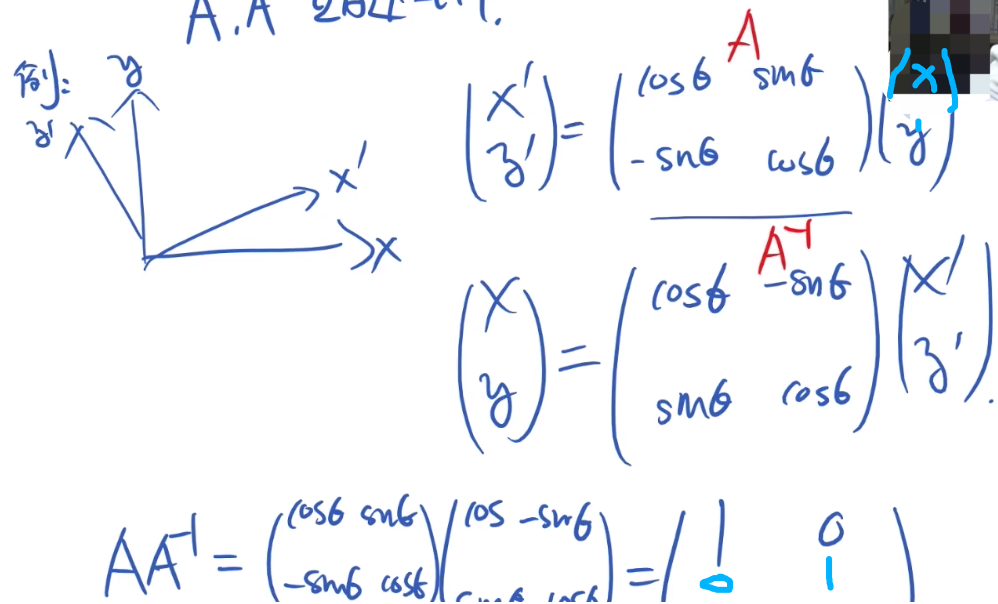
–eg1:二维空间中的旋转:
基底1 ( x ⃗ , y ⃗ ) (\vec x,\vec y) (x,y)和基底2 ( x ⃗ ′ , y ⃗ ′ ) (\vec x’,\vec y’) (x′,y′)的互相转化:
-
–eg2:A、B都是n阶方阵,若AB=I,求证A、B互逆。
-
–eg3:求证 ( A B ) − 1 = B − 1 A − 1 (AB)^{-1}=B^{-1}A^{-1} (AB)−1=B−1A−1。

-
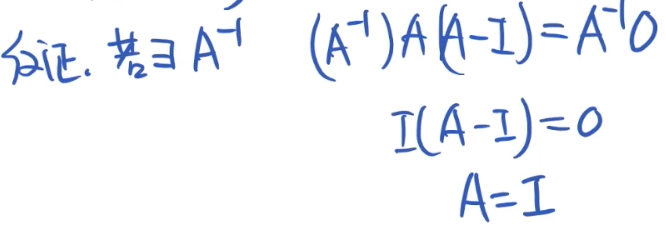
–eg4:若 A 2 = A A^2=A A2=A,且 A ≠ I A≠I A=I,求证 r a n k ( A ) ≠ n rank(A)≠n rank(A)=n(或A不可逆)。
! [矩阵不能消去-不存在除法]:
不能由 A 2 = A A^2=A A2=A两边同消去A后得到 A = I A=I A=I
-
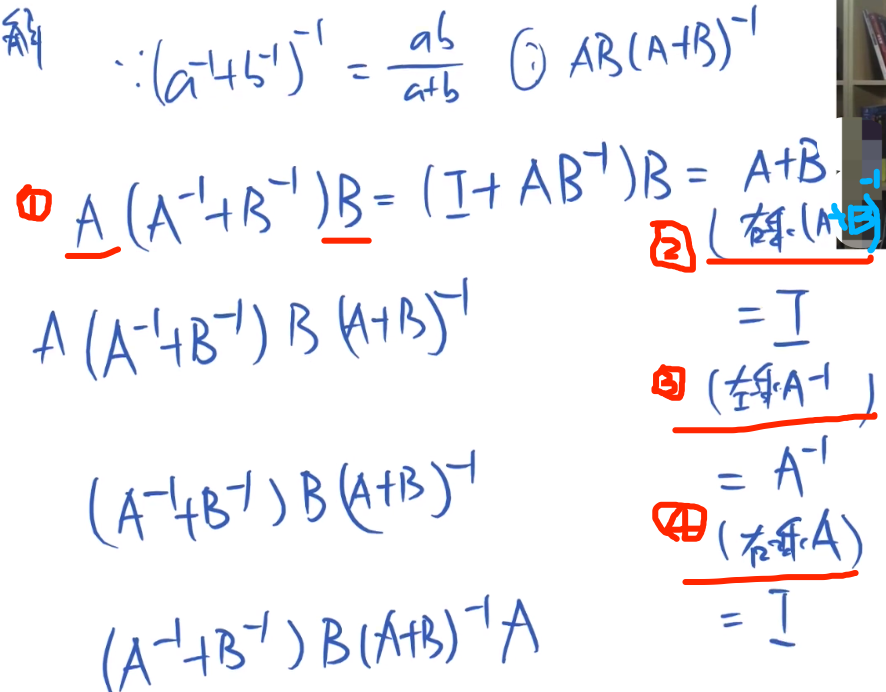
-eg5:若 A , B , A + B A,B,A+B A,B,A+B均可逆,求解 ( A − 1 + B − 1 ) − 1 (A^{-1}+B^{-1})^{-1} (A−1+B−1)−1。
3.4. 相似矩阵
参见:线性代数学习笔记(二):线性变换的理解中<2.5.3 相似矩阵>
四、矩阵的行列式
4.1. 等价类/等价关系
对于集合A={
a i a_i ai},i是指标集。
等价关系满足:
1)反身性: a i a_i ai~ a i a_i ai
2)互反性: a i a_i ai~ a j → a_j \to aj→ a j a_j aj~ a i a_i ai
3)传递性: a i a_i ai~ a j a_j aj且 a j a_j aj ~ a s → a_s \to as→ a i a_i ai~ a s a_s as
常见的等价关系:
1)相等关系:=
2)等高线上的点 等
3)矩阵相似是等价关系
常见的非等价关系:
1)不相等关系:>/<
2)垂直、正交 等
等价关系可以用来定义等价类。
等价类说白了就是根据属性相同/不同进行分类。
4.2. 行列式
只有方阵才有行列式。
对方阵M= [ M 11 M 12 . . . M 1 n M 21 M 22 . . . M 2 n . . . . . . . . . . . . M n 1 M n 2 . . . M n n ] (1) \left[ \begin{matrix} M_{11}& M_{12} &…& M_{1n}\\ M_{21} & M_{22}&… & M_{2n}\\ … & … & … &…\\ M_{n1}& M_{n2} & … &M_{nn} \end{matrix} \right] \tag{1} ⎣⎢⎢⎡M11M21...Mn1M12M22...Mn2............M1nM2n...Mnn⎦⎥⎥⎤(1)
行列式的表示方式: d e t ( M ) 或 ∣ M ∣ det(M)或|M| det(M)或∣M∣。
4.2.1 行列式的定义1
引出行列式 d e t ( M ) det(M) det(M)的第一种定义方式:
det(M)= ∑ 所 有 的 排 列 M 1 s ( 1 ) M 2 s ( 2 ) . . . M n s ( n ) ( − 1 ) σ ( s ( 1 ) , s ( 2 ) , . . . , s ( n ) ) \sum_{所有的排列} M_{1s(1)}M_{2s(2)}…M_{ns(n)}(-1)^{\sigma (s(1),s(2),…,s(n))} ∑所有的排列M1s(1)M2s(2)...Mns(n)(−1)σ(s(1),s(2),...,s(n))
- 对定义1表达式的几点解释:
- s ( 1 ) , s ( 2 ) , . . . , s ( n ) s(1),s(2),…,s(n) s(1),s(2),...,s(n)是对下标数字 1 , 2 , . . . , n 1,2,…,n 1,2,...,n的一种排列;
- M n s ( n ) M_{ns(n)} Mns(n)
- σ ( s ( 1 ) , s ( 2 ) , . . . , s ( n ) ) \sigma (s(1),s(2),…,s(n)) σ(s(1),s(2),...,s(n))就表示 s ( 1 ) , s ( 2 ) , . . . , s ( n ) s(1),s(2),…,s(n) s(1),s(2),...,s(n)的这个排列中逆序数对的个数。
逆序数对:用 σ ( , . . . , ) \sigma ( , … , ) σ(,...,)表示一列数中逆序数对的个数。
eg: σ ( 4 , 1 , 3 , 2 ) = 4 \sigma (4,1,3,2)=4 σ(4,1,3,2)=4
- 对行列式表达式的理解:
“ M 1 s ( 1 ) ∗ M 2 s ( 2 ) ∗ . . . ∗ M n s ( n ) M_{1s(1)}*M_{2s(2)}*…*M_{ns(n)} M1s(1)∗M2s(2)∗...∗Mns(n)“中:
— 1,2,…,n表示第i行;
— s ( 1 ) , s ( 2 ) , . . . , s ( n ) s(1),s(2),…,s(n) s(1),s(2),...,s(n)表示了一种确定的排列方式;
— M 1 s ( 1 ) M_{1s(1)} M1s(1)则表示对第1行,我们取了第s(1)列位置的那个数。
— M i s ( i ) M_{is(i)} Mis(i)表示对每一行选一个数,这个数位于第s(i)列。并且这一列在之前没有被取到过。 - 几个简单的行列式:
对 M 1 ∗ 1 、 M 2 ∗ 2 、 M 3 ∗ 3 M_{1*1}、M_{2*2}、M_{3*3} M1∗1、M2∗2、M3∗3使用定义,得到其行列式表达式:
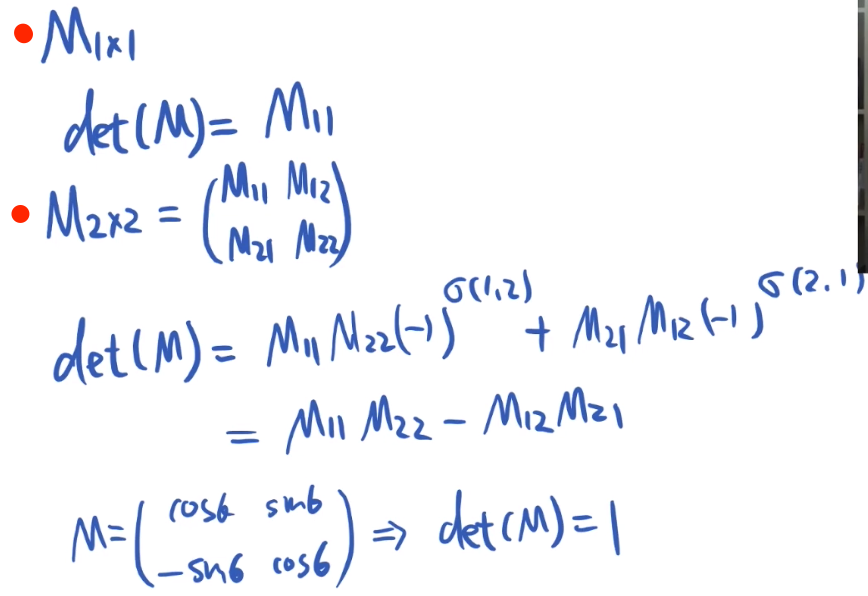
4.2.2 行列式的定义2
4.2.2.1 检测三维旋转
三维空间中的任何一个旋转都可以认为成先绕着y轴旋转 α \alpha α°,z轴旋转 β \beta β°得到的。
( α 和 β \alpha 和\beta α和β的选择能遍历所有的转动)
转动M由:先绕y轴旋转得到矩阵 M 1 M_1 M1,后z轴旋转得到矩阵 M 2 M_2 M2。所以 M = M 2 ∗ M 1 M=M_2*M_1 M=M2∗M1。
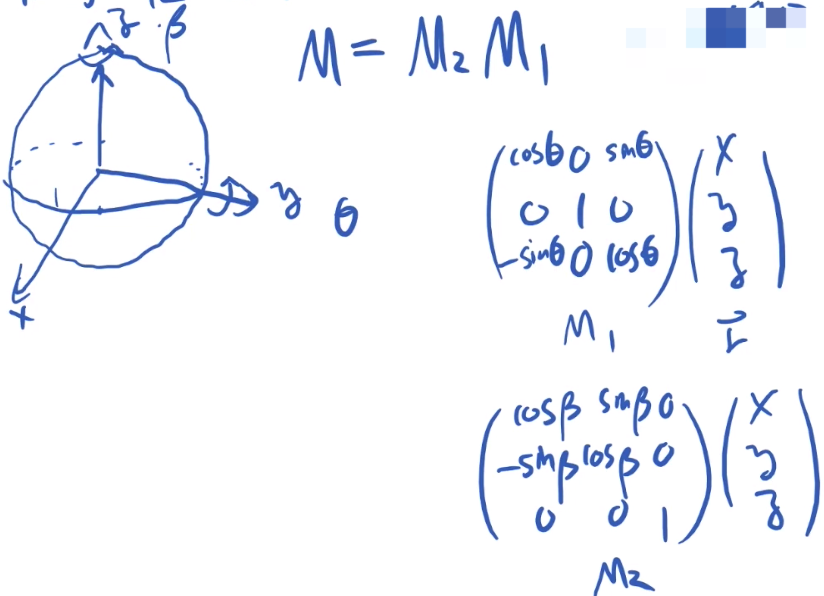 得到 M M M=
得到 M M M=
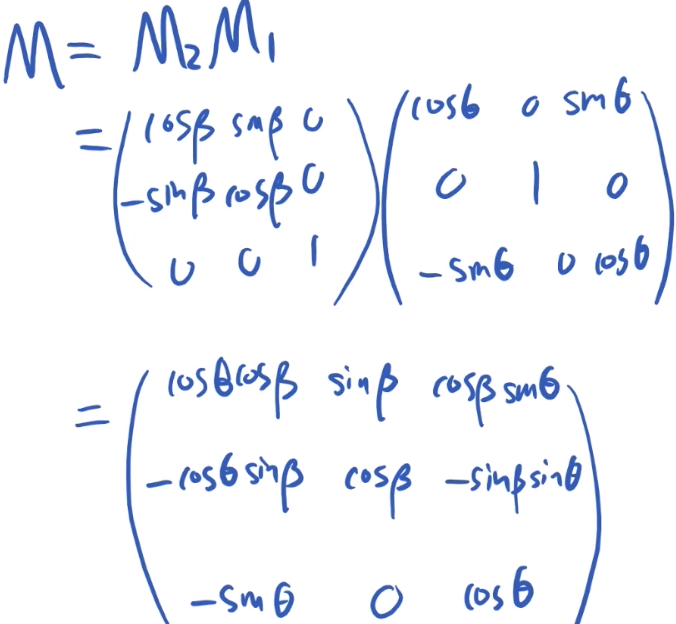
对旋转操作得到的 M M M,求其行列式 d e t ( M ) det(M) det(M)得:
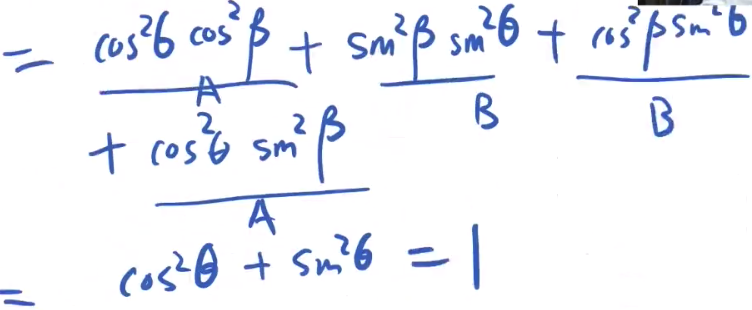 看上去说不出什么理由的行列式公式,我们带入旋转操作的变换后得出的结果竟然是1。
看上去说不出什么理由的行列式公式,我们带入旋转操作的变换后得出的结果竟然是1。
从这我们得到行列式的第二种定义方式。
4.2.2.2 行列式的定义2
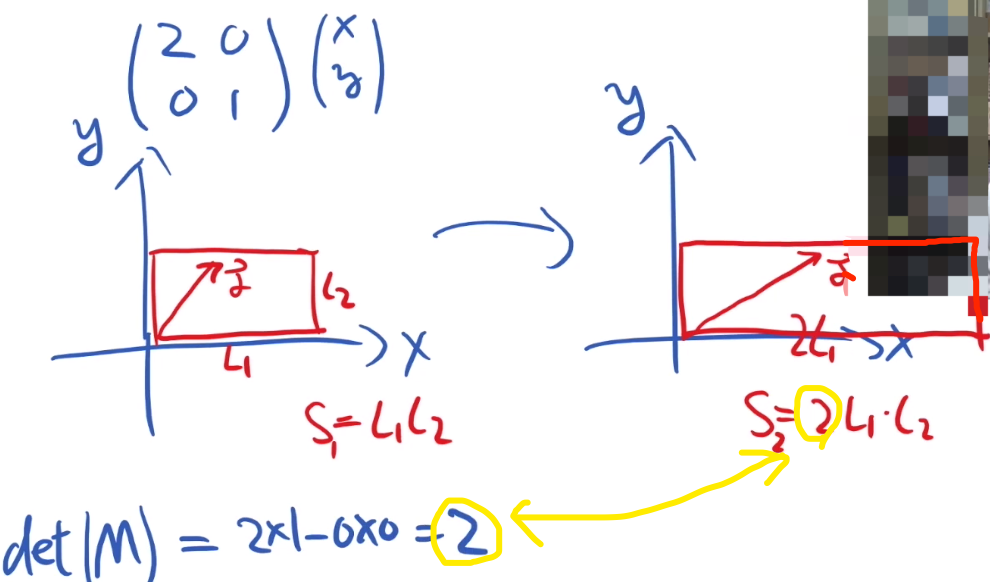
行列式的定义2阐述了行列式的物理意义。
M为n*n阶的方阵。
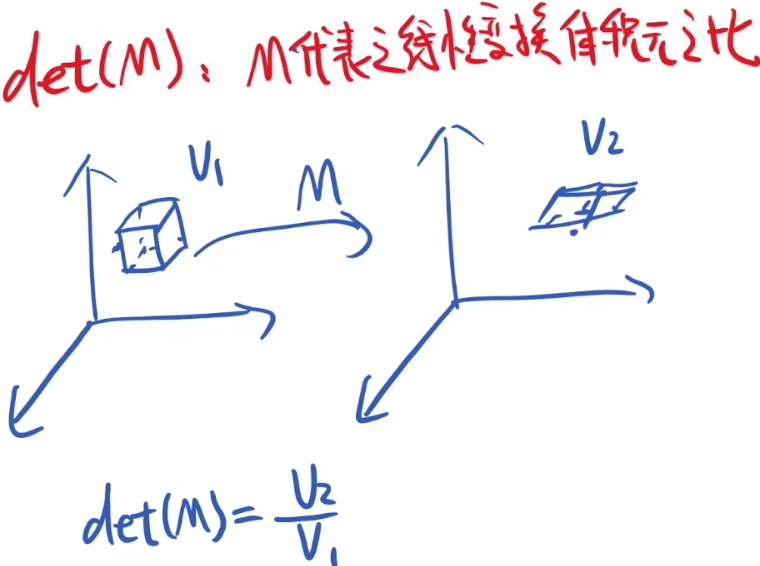
d e t ( M ) det(M) det(M)所代表的的几何意义:
M代表:线性变换**体积元之比**。
对n维空间中的n维体积进行变换后,变换后的体积与原体积之比就是行列式。行列式最本质的东西就是微元的体积比。
- 考察体积之比与n维体积的形状无关:
无论整体的形状是什么样子,最终我们考虑的是这个体积中某一微元的变换,微元都可以看做是一个小的矩形(表示为 d y d x \frac{dy}{dx} dxdy)。
因为是线性变换,整体的体积变换与每个小微元的变换是一样的。
 -eg1:
-eg1:
-eg2:
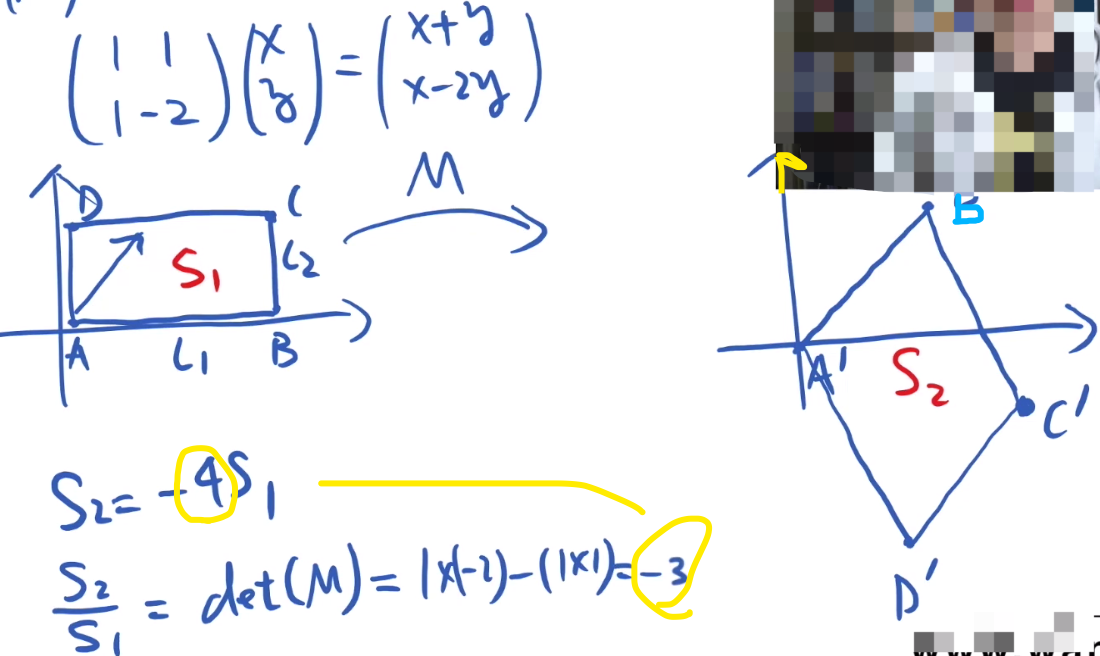
– 用 d e t ( M ) det(M) det(M)的这种几何意义看其性质:
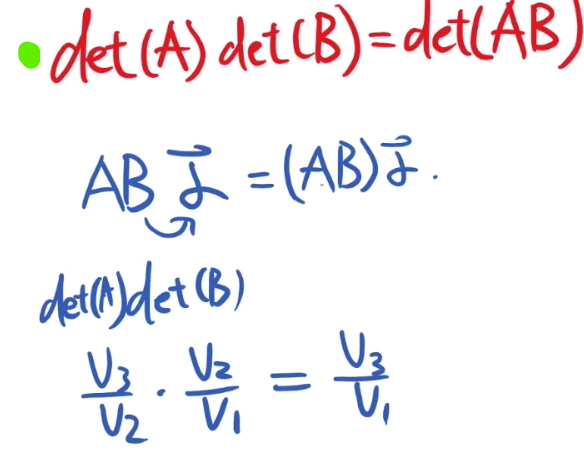
1)对于矩阵乘法 A ∗ B : d e t ( A B ) = d e t ( A ) d e t ( B ) A*B:det(AB)=det(A)det(B) A∗B:det(AB)=det(A)det(B)
2) d e t ( A B ) = d e t ( B A ) det(AB)=det(BA) det(AB)=det(BA)
(1) 用 d e t ( M ) det(M) det(M)的几何意义理解性质1:
对于线性空间中向量 α ⃗ \vec \alpha α,对其分别做线性变换A和B,也就是 A ( B α ⃗ ) = ( A B ) α ⃗ A(B \vec \alpha)=(AB) \vec \alpha A(Bα)=(AB)α:
先对 α ⃗ \vec \alpha α做线性变换 B B B再做变换 A A A等价于 ( A B ) (AB) (AB)整体的线性变换作用到 α ⃗ \vec \alpha α上。
用行列式的观点看,对 α ⃗ \vec \alpha α的两个变换可以理解为: V 3 V 2 ∗ V 2 V 1 = V 3 V 1 \frac{V3}{V2}*\frac{V2}{V1}=\frac{V3}{V1} V2V3∗V1V2=V1V3。
 (2) 性质2:
(2) 性质2:
d e t ( A ) d e t ( B ) = d e t ( B ) d e t ( A ) det(A)det(B)=det(B)det(A) det(A)det(B)=det(B)det(A)(两个数相乘有交换律)
d e t ( A ) d e t ( B ) = d e t ( A B ) , d e t ( B ) d e t ( A ) = d e t ( B A ) det(A)det(B)=det(AB),det(B)det(A)=det(BA) det(A)det(B)=det(AB),det(B)det(A)=det(BA)
所以 d e t ( A B ) = d e t ( B A ) det(AB)=det(BA) det(AB)=det(BA)。
4.2.2.3 雅可比行列式
在高数中对行列式思想的例子。
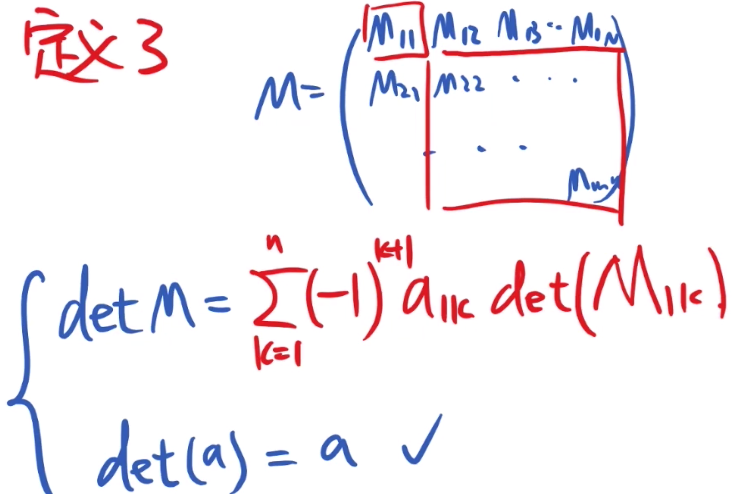
4.2.2.4 行列式的定义3
行列式的第三种定义方式采用的思想是递归。
对方阵M,求其行列式如下:
d e t ( M ) = { ∑ k = 1 n ( − 1 ) k + 1 a 1 k d e t ( M 1 k ) k!=1 a k=1 det(M)= \begin{cases} \sum_{k=1}^n(-1)^{k+1}a_{1k}det(M_{1k})& \text{k!=1}\\ a& \text{k=1} \end{cases} det(M)={
∑k=1n(−1)k+1a1kdet(M1k)ak!=1k=1
- 表达式的理解:
a 1 k × d e t ( M 1 k ) a_{1k}×det(M_{1k}) a1k×det(M1k):
a 1 k a_{1k} a1k:方阵M中取出第1行第k列的那个元素;
d e t ( M 1 k ) det(M_{1k}) det(M1k):方阵M除去第1行第k列所有元素外构成的(n-1)*(n-1)的方阵。相乘
这是一种递归的思想,把求解n维的问题转换成求解n-1维的问题,不断递归,递归的出口:1×1的方阵的行列式等于它本身。
而这种递归的思想是计算机喜欢的,手算的话容易晕。
五、矩阵的特征值与特征向量
详见:线性代数学习笔记(四):矩阵的理解之— 矩阵的特征值与特征向量
六、线性代数核心定理
详见:线性代数学习笔记(五):矩阵的理解之— 线性代数核心定理
七、线性空间和线性变换的理解
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/142707.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
