大家好,又见面了,我是你们的朋友全栈君。
基于计算机组成原理(第2版)唐朔飞编著
第2篇 计算机系统的硬件结构
第3章 系统总线
-
计算机系统的五大部件之间的互连方式有两种:分散连接、总线连接
-
总线是连接多个部件(模块)的信息传输线,是各部件共享的传输介质。在某一时刻只允许有一个部件向总线发送信息,但多个部件可以同时从总线上接收相同的信息。
-
总线的定义:为多个功能组件服务的一组公用信息线。
-
按功能分类:地址总线、数据总线、控制总线。
-
按连接部件不同分类:片内总线、系统总线、通信总线。
-
按系统总线传输信息的不同,分为三类:数据总线、地址总线、控制总线。
-
总线特性:机械特性、电气特性、功能特性、时间特性。
-
总线复用:一条信号线上分时传送两种信号。地址线和数据线复用。
-
总线带宽是指单位时间内总线上可传输的数据位数,通常用每秒传送信息的字节数来衡量,单位可用MBps(兆字节每秒)表示。
-
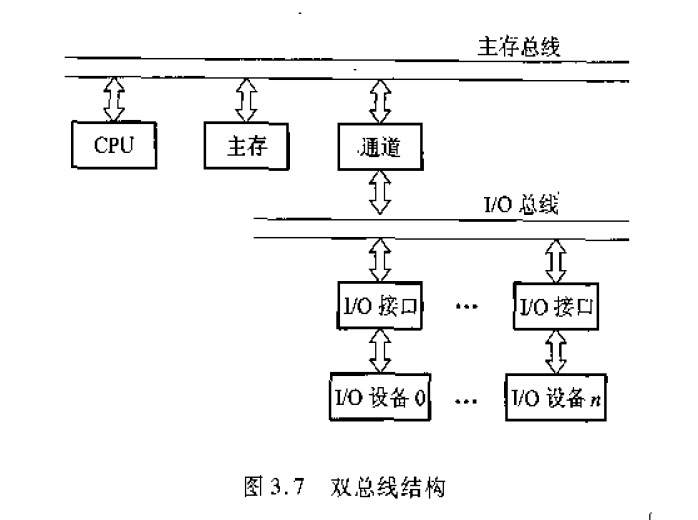
通道是一个具有特殊功能的处理器,对I/O设备具有统一管理的功能。

-
总线线判优控制:确定哪个主设备能使用总线。
分为集中式和分布式两种。 -
集中式:链式查询、计数器定时查询、独立请求方式。
-
链式查询方式特点:很容易扩充设备,对电路故障很敏感
-
计数器定时查询方式:当某个请求占用总线的设备地址与计数值一致时,便获得总线使用权,此时终止计数查询。
特点:计数可以从“0”开始,此时一旦设备的优先次序被固定,设备的优先级就按0,1,…,n的顺序降序排列;计数也可以从上一次计数的终止点开始,即循环,此时设备使用总线的优先级相等;计数器的初始值还可由程序设置,故优先次序可以改变。控制较复杂。 -
独立请求方式特点:响应速度快,优先次序控制灵活,但控制线数量多,总线控制更复杂。
-
总线通信控制:同步通信、异步通信、半同步通信和分离式通信。
例题

第4章 存储器
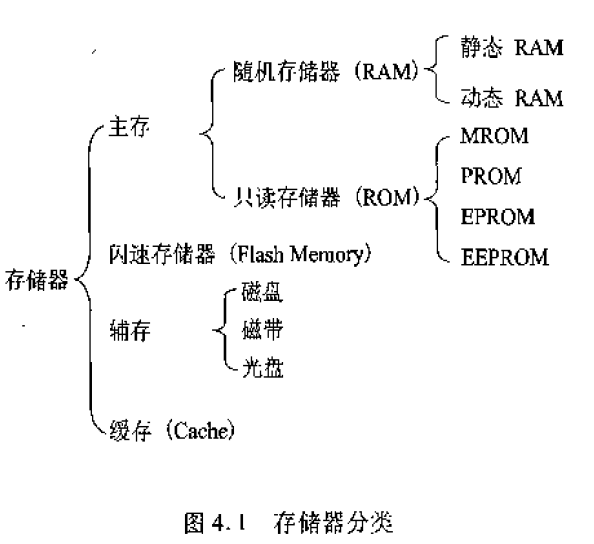
1.存储器分类
- 按存储介质分类:半导体存储器、磁表面存储器、磁芯存储器、光盘存储器。
- 半导体存储器:
优点:体积小、功耗低、存取时间短
缺点:易失 - 按存取方式分类:随机存储器(RAM)、只读存储器(ROM)、串行访问存储器。
- 按在计算机中的作用分类:主存储器、辅助存储器、缓冲存储器。
2.存储器的层次结构
- 存储器有3个主要性能指标:速度、容量、每位价格(位价)
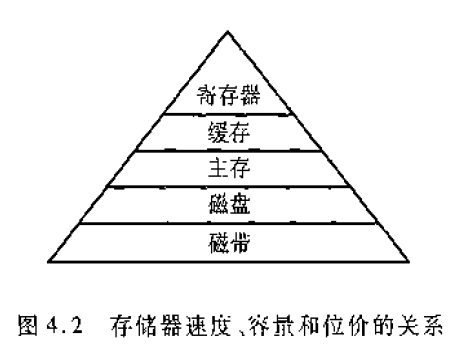
图中由上至下,位价越来越低,速度越来越慢,容量越来越大。
磁盘、磁带属于辅助存储器。 - 缓存-主存层次主要解决CPU和主存速度不区配的问题
- 主存-辅存主要解决存储系统的容量问题
- 主存-辅存这一层次的不断发展中,逐渐形成了虚拟存储系统。
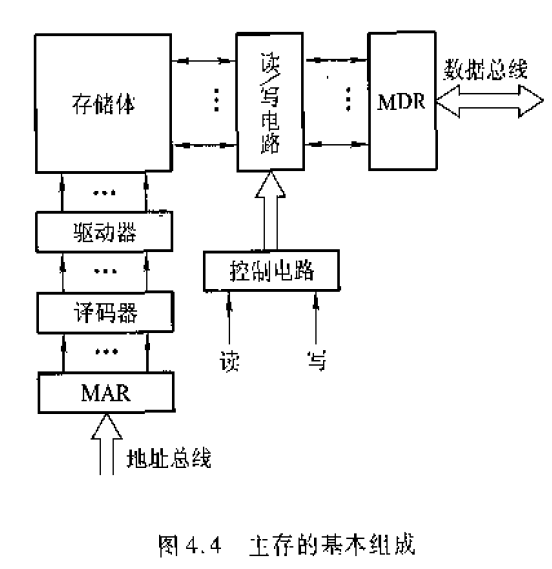
3.主存储器
-
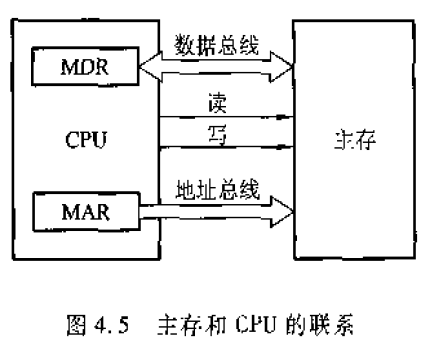
CPU与主存间的连线:地址总线、数据总线、读写控制线
-
为满足字符处理的需要,常用8位二进制数表示一个字节,因此存储字长都取8的倍数。
-
主存的技术指标:存储容量、存储速度、存储器带宽
-
主存的主要技术指标是存储容量和存储速度。
-
存储容量:存储容量是指主存能存放二进制代码的总位数
-
存储速度:存储速度由存取时间和存取周期来表示
存取时间:又称为存储器的访问时间,是指启动一次存储器操作(读或写)到完成该操作所需的全部时间。存取时间分读出时间和写入时间两种。
存取周期:指存储器进行连续两次独立的存储器操作所需的最小时间间隔,通常存取周期大于存取时间。 -
地址线是单项输入的,其位数与芯片容量有关
-
数据线是双向的,其位数与芯片可读出或写入的数据位数有关。
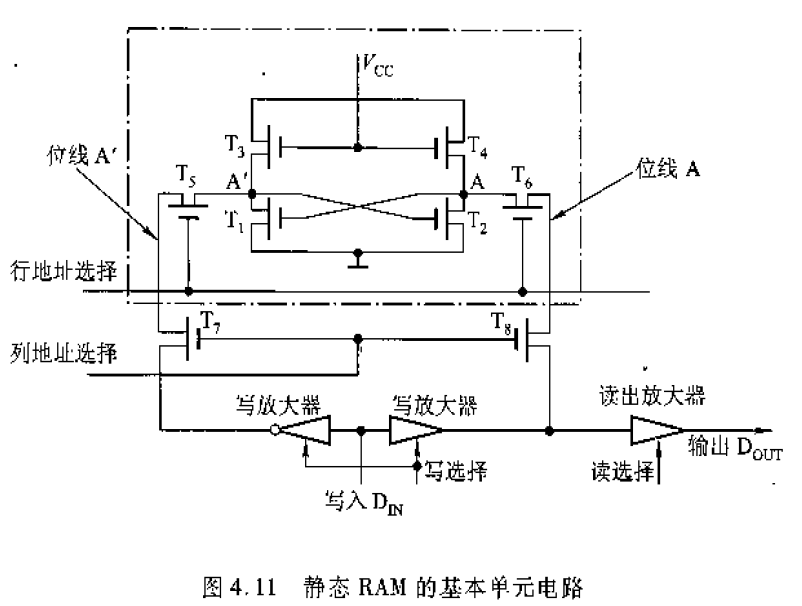
静态RAM(SRAM)
- 属易失性半导体存储器
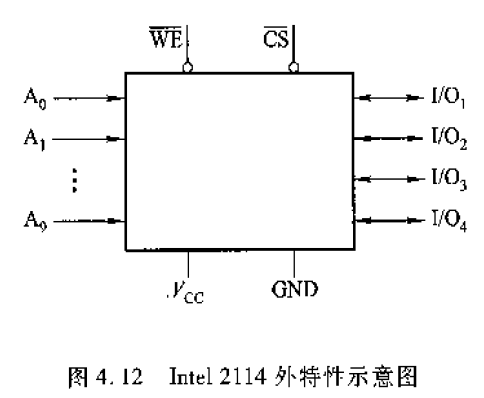
图中, A 9 A_9 A9~ A 0 A_0 A0为地址输入端; I / O 1 I/O_1 I/O1~ I / O 4 I/O_4 I/O4为数据输入/输出端; C S ‾ \overline{CS} CS为片选信号(低电平有效); W E ‾ \overline{WE} WE为写允许信号(低电平写,高电平读)。
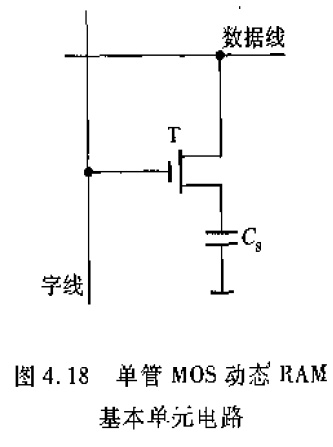
动态RAM(DRAM)
- 读出与原存信息相反(因此加了一个非门)。写入与输入信息相同。
- 三种刷新方式:集中刷新、分散刷新、异步刷新
- 集中刷新:在规定的一个刷新周期内,对全部存储单元集中一段时间逐渐进行刷新,此刻必须停止读/写操作。
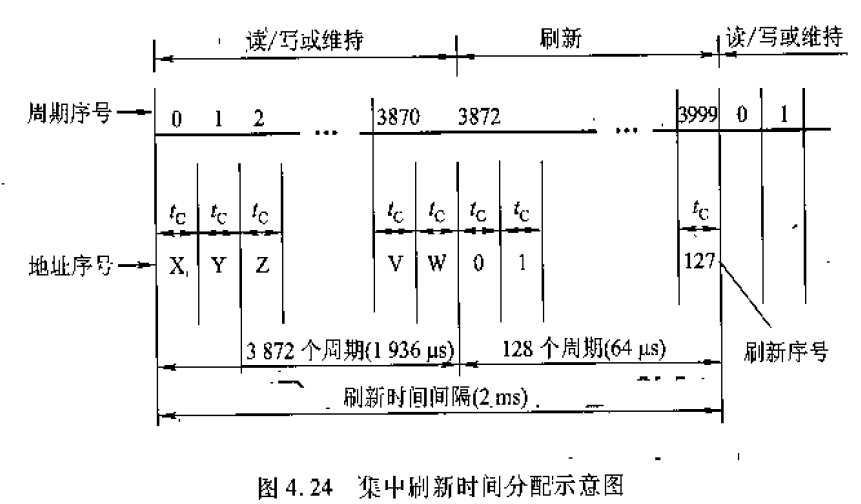
在64μs时间内不能进行读/写操作,故称“死时间”,又称访存“死区”,所占比率为128/4000×100%=3.2%,称为死时间率。 - 分散刷新:
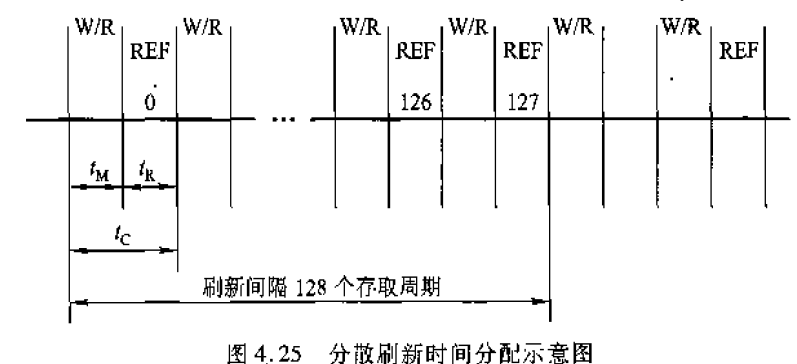
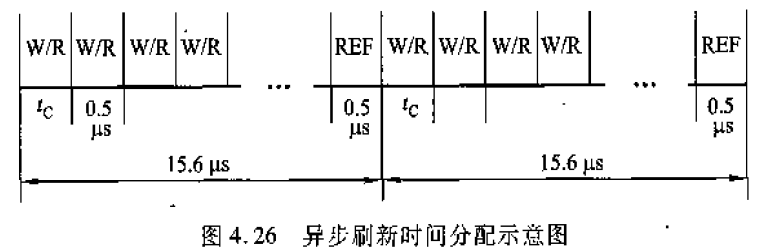
- 异步刷新:
分散刷新与集中刷新相结合。既可缩短“死时间”,又充分利用最大刷新间隔为2ms的特点。
动态RAM和静态RAM的比较
| DRAM | SRAM | |
|---|---|---|
| 存储原理 | 电容 | 触发器 |
| 集成度 | 高 | 低 |
| 芯片引脚 | 少 | 多 |
| 功耗 | 小 | 大 |
| 价格 | 低 | 高 |
| 速度 | 慢 | 快 |
| 刷新 | 有 | 无 |
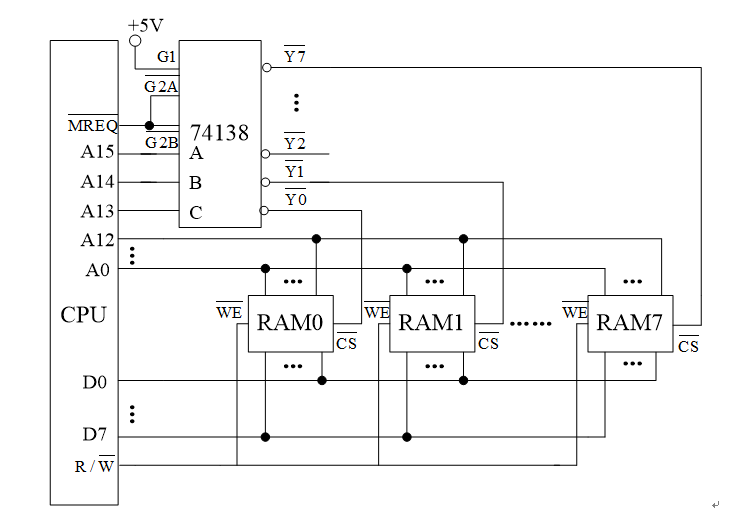
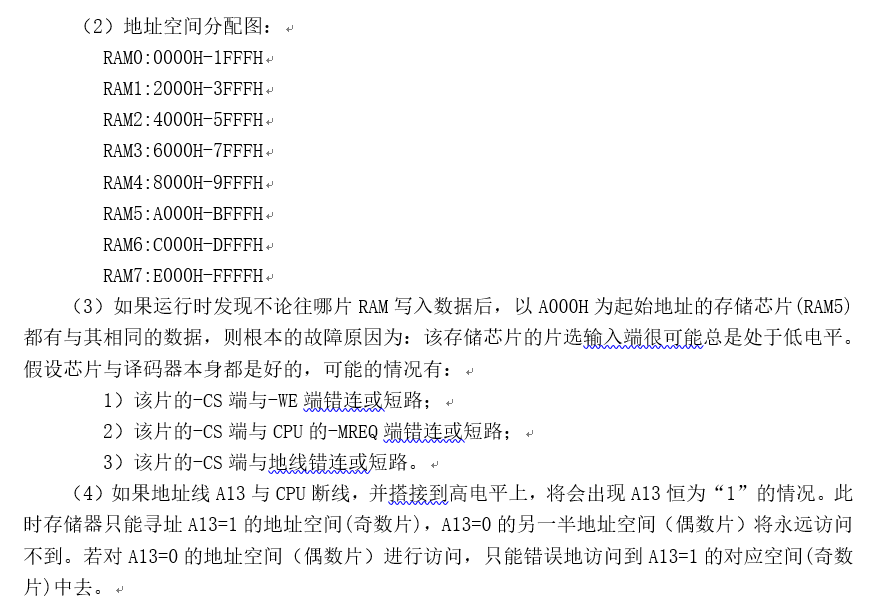
存储器与CPU的连接
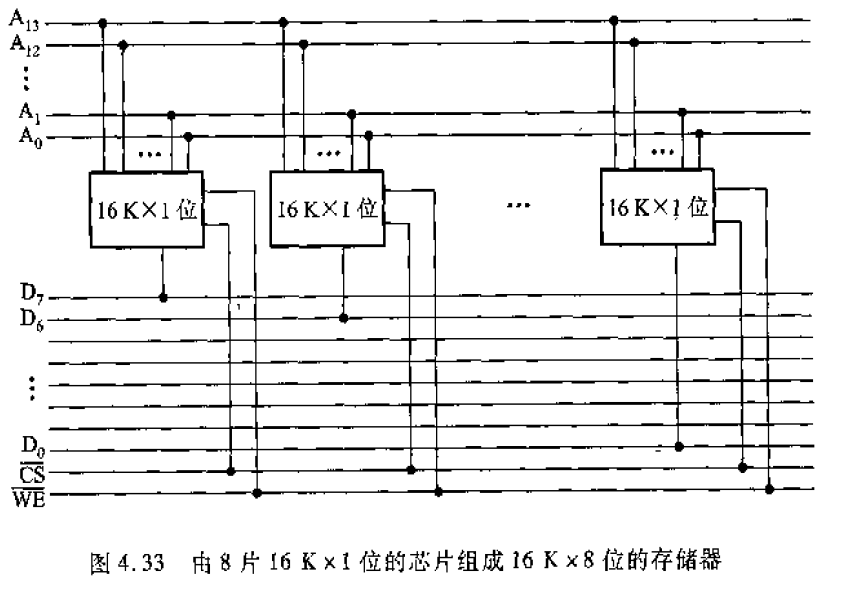
1.位扩展
- 增加存储字长
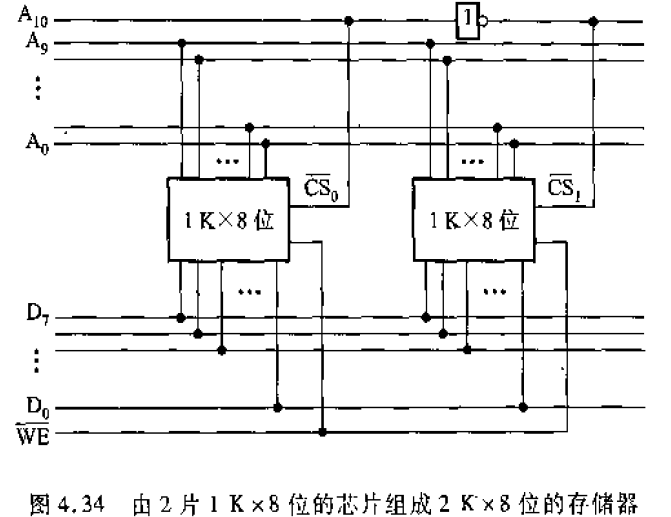
2.字扩展 - 增加存储器字的数量
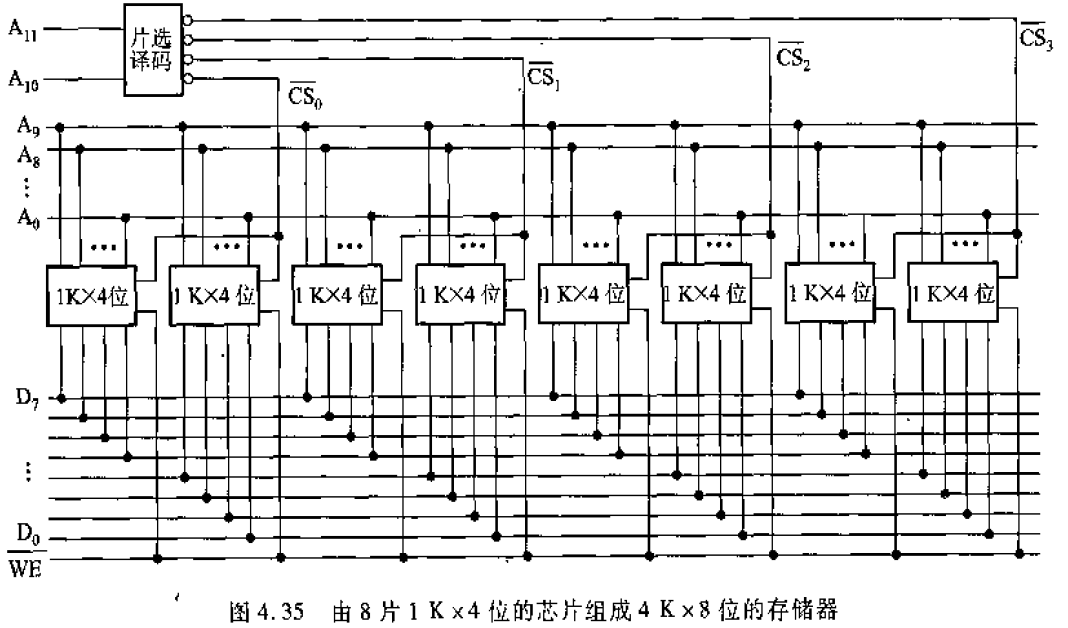
3.字、位扩展
存储器的校验
-
为了能及时发现错误并及时纠正错误,通常可将原数据配成汉明编码(采用奇偶校验、分组校验)
-
任何一种编码是否具有检测能力和纠错能力,都与编码的最小距离有关
L − 1 = D + C L-1=D+C L−1=D+C 且 D≥C
编码最小距离L越大,检测错误的位数D越大,纠正错误的位数C越大。且纠错能力恒小于等于检错能力。 -
设欲检测的二进制代码为n位,需增添k位检测位,新增添的检测位数k应满足:
2 k ≥ n + k + 1 2^k≥n+k+1 2k≥n+k+1 -
汉明码的分组是一种非划分方式
-
检测位的取值与该位所在的检测“小组”承担的奇偶校验任务有关
-
如果按配偶原则来配置汉明码,则 C 1 C_1 C1应使1、3、5、7位中的“1”的个数为偶数; C 2 C_2 C2应使2、3、6、7位中“1”的个数为偶数; C 4 C_4 C4应使4、5、6、7位中的“1”的个数为偶数。
-
按奇配置与按偶配置所求得的 C i C_i Ci值正好相反
-
检测位不参与运算
提高访存速度的措施
- 寻找高速元件,采用层次结构,调整主存的结构
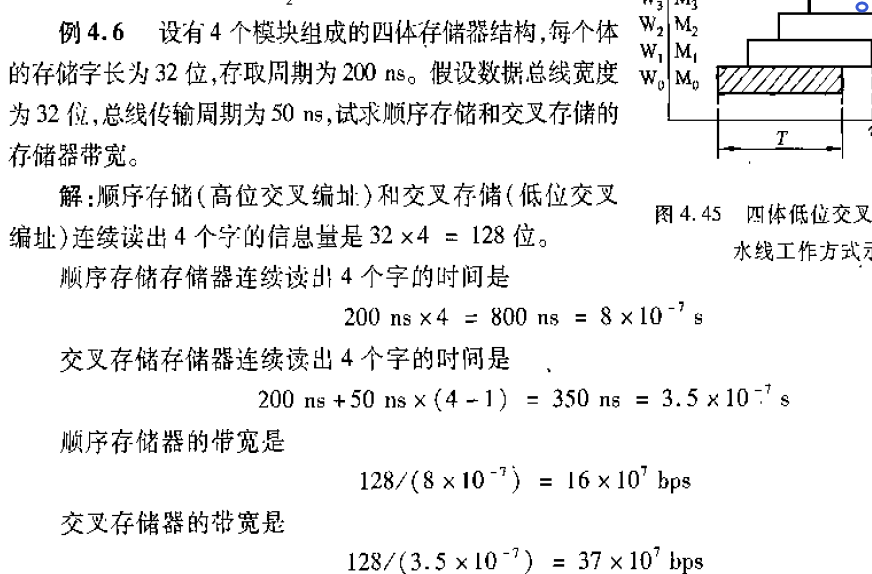
- 交叉编址的存储器实质能并行执行多个独立的读写操作
- 多体并行系统可以低位交叉编址、高位交叉编址
- SDRAM(同步DRAM)
SDRAM与常用的异步DRAM不同,它与处理器的数据交换同步于系统的时钟信号,并且以处理器-存储器总线的最高速度运行,而不需要插入等待状态。
4.高速缓冲存储器
-
由高速缓冲存储器Cache来解决主存与CPU速度的不区配问题
-
缓存的块数C远小于主存的块数M
-
Cache的容量与块长是影响Cache效率的重要因素
-
N c N_c Nc为访问Cache的总命中次数, N m N_m Nm为访问主存的总次数,命中率h为:
h = N c N c + N m h=\frac{N_c}{N_c+N_m} h=Nc+NmNc
t c t_c tc为命中时的Cache访问时间, t m t_m tm为未命中时的主存访问时间,1-h表示未命中率,Cache-主存系统的平均访问时间 t a t_a ta为:
t a = h t c + ( 1 − h ) t m t_a=ht_c+(1-h)t_m ta=htc+(1−h)tm
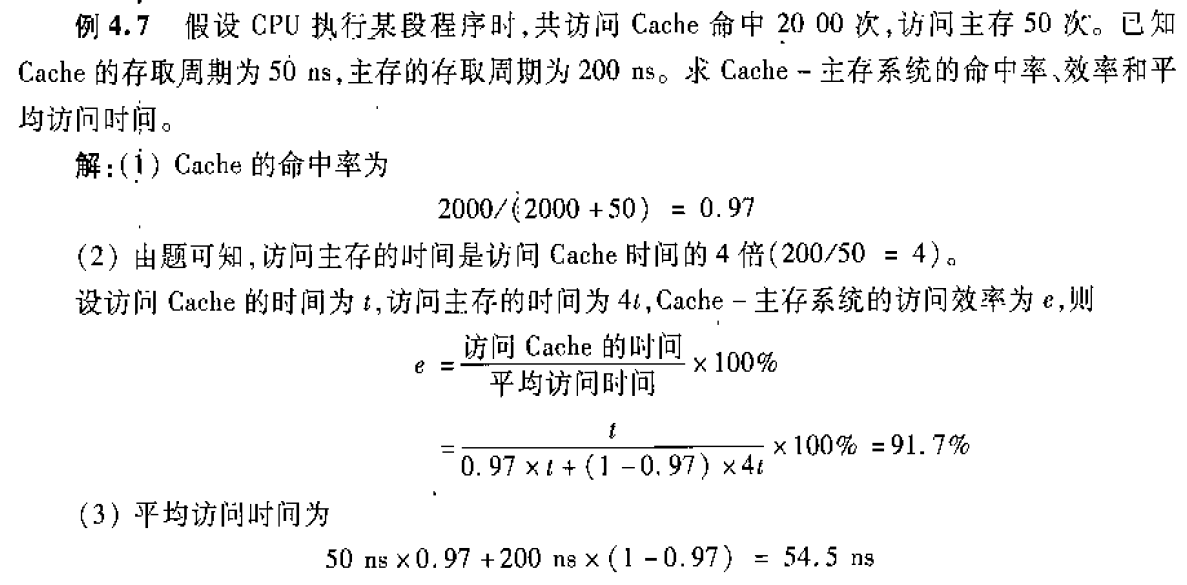
用e表示访问效率(e与命中率有关):
e = t c t a × 100 % = t c h t c + ( 1 − h ) t m × 100 % e=\frac{t_c}{t_a}×100%=\frac{t_c}{ht_c+(1-h)t_m}×100% e=tatc×100%=htc+(1−h)tmtc×100%
例题:
-
程序运行的局部性原理:在一小段时间内,最近被访问过的程序和数据很可能再次被访问;在空间上,这些被访问的程序和数据往往集中在一小片存储区;在访问顺序上,指令顺序执行比转移执行的可能性大 (大约 5:1)。存储系统中Cache—主存层次采用了程序访问的局部性原理。
-
Cache的读写操作
①写直达法:写操作时数据既写入Cache又写入主存,能随时保证主存和Cache的数据始终一致。增加了访存次数
②写回法:写操作时只把数据写入Cache而不写入主存,但当Cache数据被替换出去时才写回主存。 -
地址映射方式:直接映射、全相联映射、组相联映射
-
直接映射:
优点:实现简单
缺点:不够灵活 -
全相联映射:
允许主存中每一字块映射到Cache中的任何一块位置上
优点:灵活,命中率更高,缩小了块冲突率
缺点:所需逻辑电路甚多,成本较高 -
组相联映射:
直接映射和全相联映射的一种折中,组内全相联映射、组间直接映射。
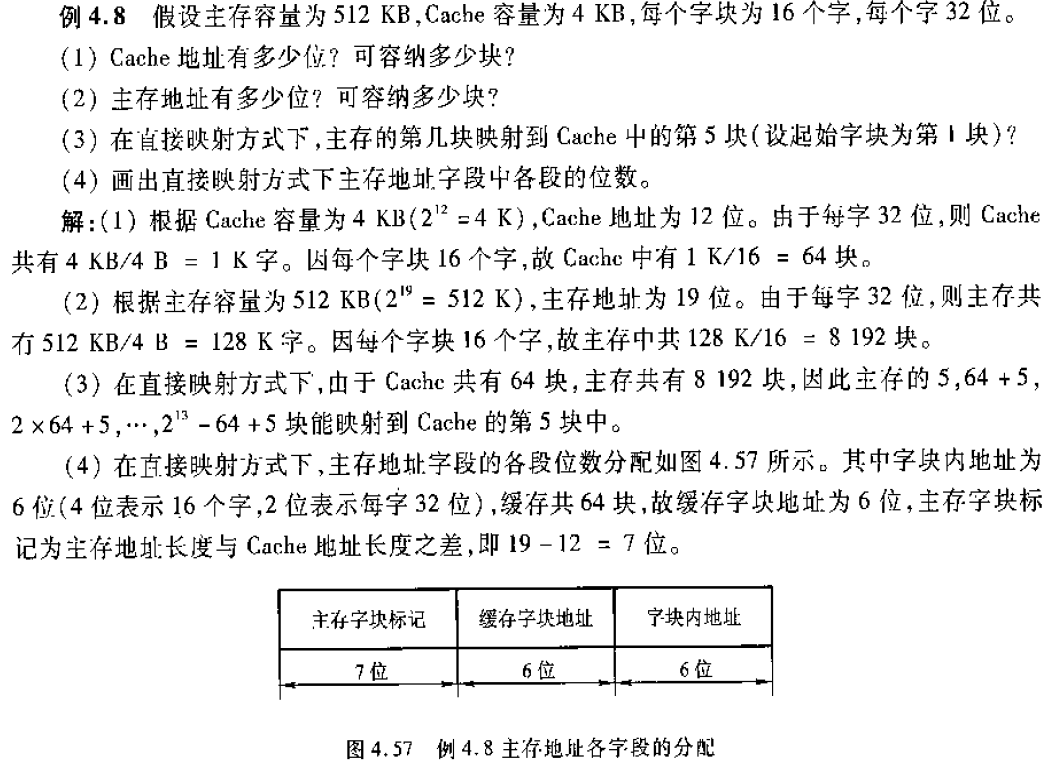
例题
替换策略:
- 先进先出(FIFO)算法
容易实现,开销小,但没有根据访存的局部性原理,不能提高Cache的命中率 - 近期最少使用(LRU)算法
LRU算法的平均命中率比FIFO高
5.辅助存储器
- 不直接与CPU交换信息
- 磁表面存储器的主要技术指标:
(1)记录密度
(2)存储容量
(3)平均寻址时间
(4)数据传输率
(5)误码率 - 硬磁盘存储器由磁盘驱动器、磁盘控制器和盘片3大部分组成
- 磁盘控制器是主机与磁盘驱动器之间的接口
- 应用激光在某种介质上写入信息,然后再利用激光读取信息,这种技术称为光存储技术。
例题



发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/142628.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
