大家好,又见面了,我是你们的朋友全栈君。
内容提要:
双目相机标定目的:求出左、右相机的内、外参数矩阵以及畸变参数
使用软件:matlab 2018
标定过程分三步走:
- 图像采集
- 图像分割
- matlab工具箱标定
第一步 图像采集
本实例采用的双目相机如下图所示:


采集程序见双目相机拍摄demo程序(vs2017)
用vs2017打开采集程序,界面如下:
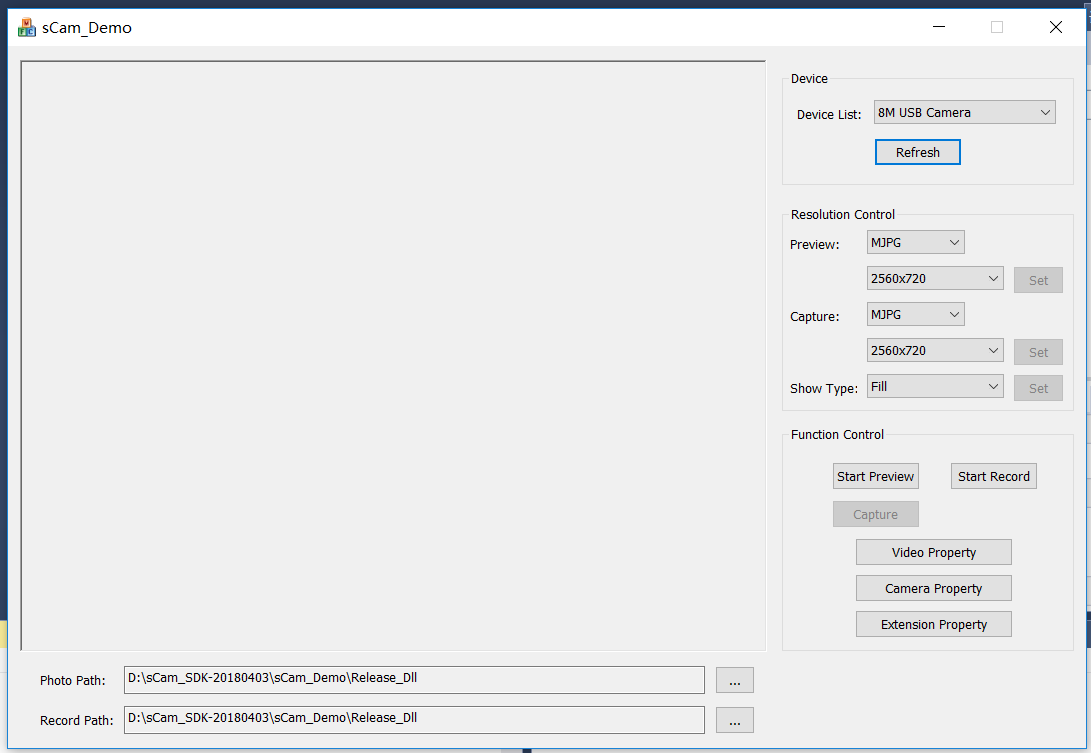
点击Start Preview按钮,双目相机打开。
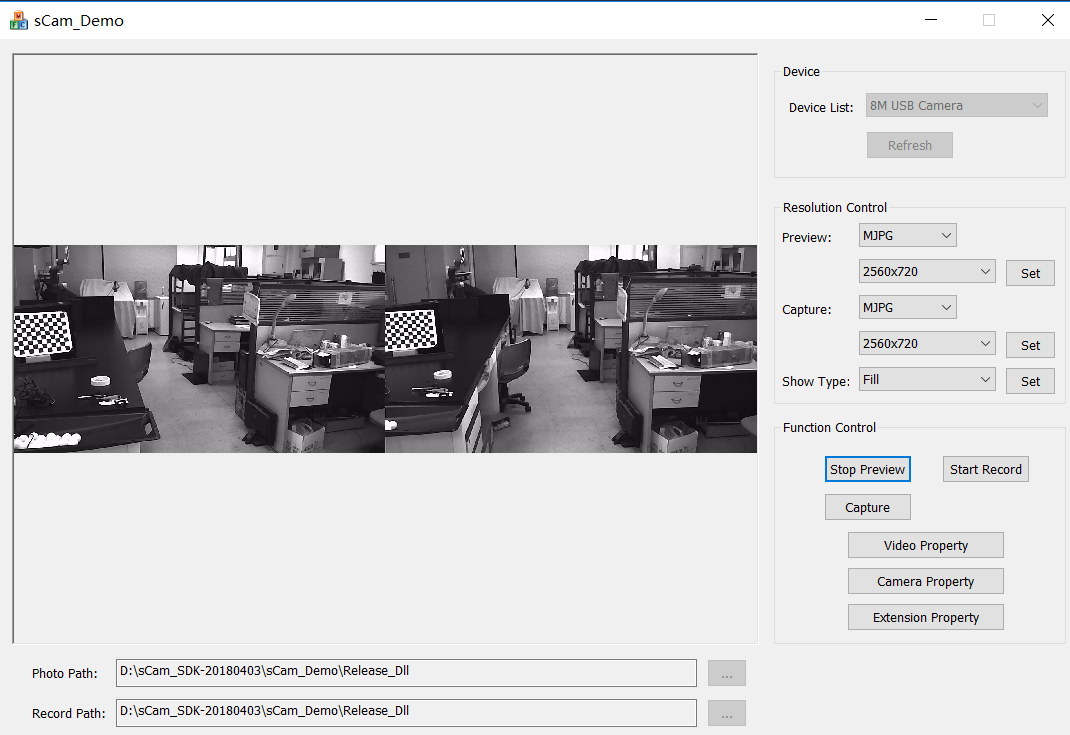
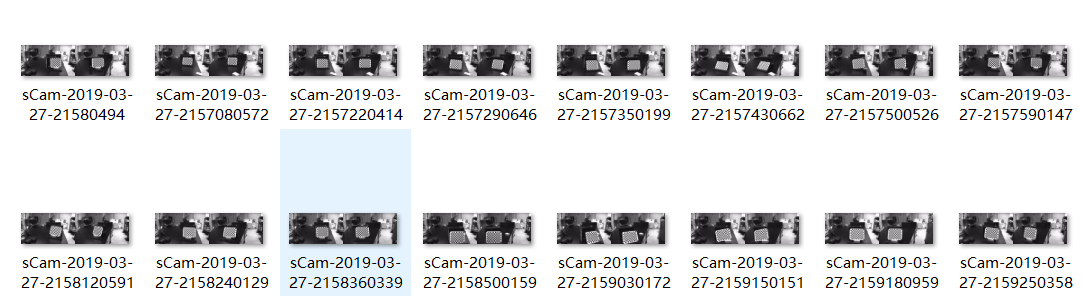
点击Capture,即可抓拍。为了保证标定效果,笔者建议将标定棋盘放在不同位置,抓拍十张以上照片。
第二步 图像切割
双目相机直接采集到的图像中包含左右相机的分图像,标注时要求将直接采集到的图像进行切割。本人采用matlab程序编写的切割代码。
clear;
A=imread(‘16.jpg’); //读取原图
[m ,n,~]=size(A); //读取原图尺寸,原图为三通道
n1=n/2;
picture_1=zeros(m,n1,3);
picture_2=zeros(m,n1,3);
picture_1=A(:,1:n1,:);
picture_2=A(:,n1+1:n,:);
cd(‘C:\Users\hongyi\Desktop\3_27_2\left’); //将切割好的左右图像保存到指定文件夹
imwrite(picture_1,‘16_l.jpg’);
cd(‘C:\Users\hongyi\Desktop\3_27_2\right’);
imwrite(picture_2,‘16_r.jpg’);
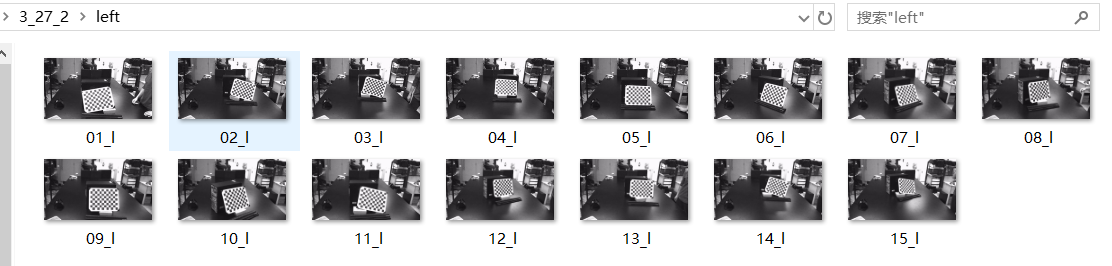
切割效果

第三步 使用matlab标定
打开matlab,在命令行窗口输入stereoCameraCalibrator,运行。

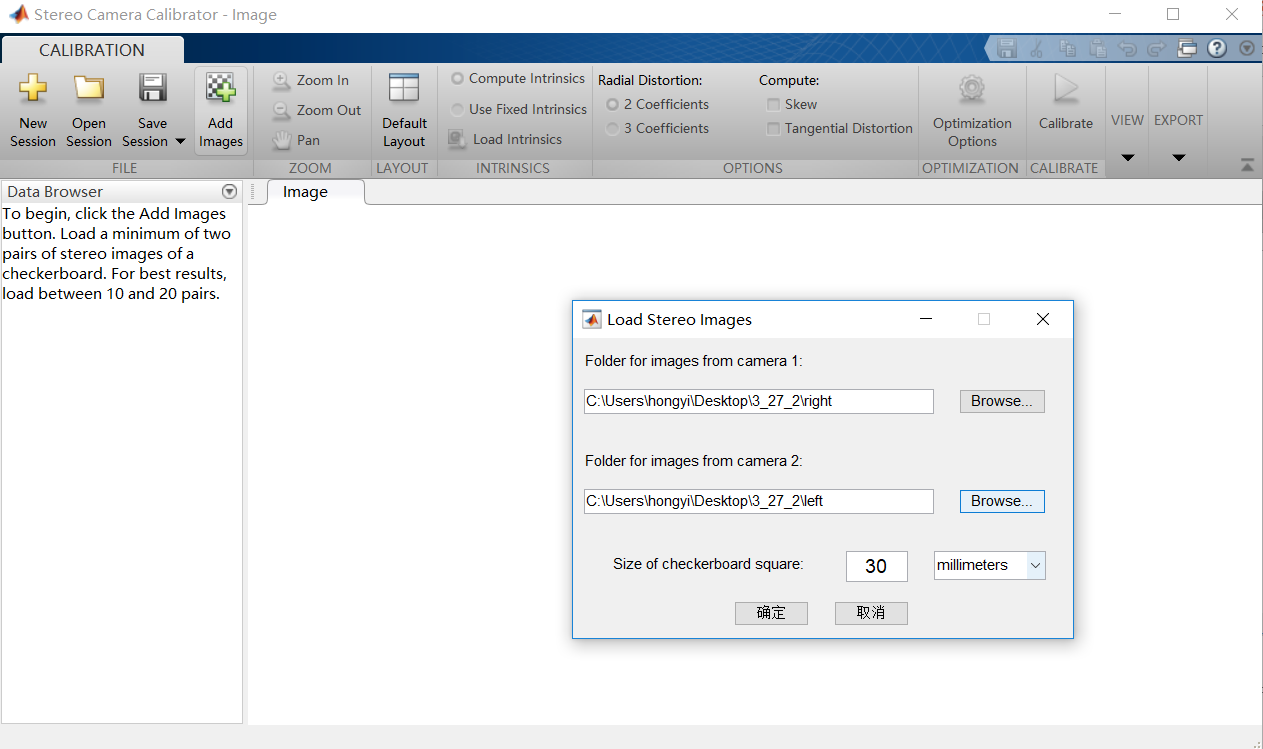
点击界面左上角的Add Images,输入左相机图片和右相机图片所在的文件夹,以及标定板的网格尺寸。(本人使用的标定板尺寸为30mm)
点击确定,标定板上的点就会被自动识别。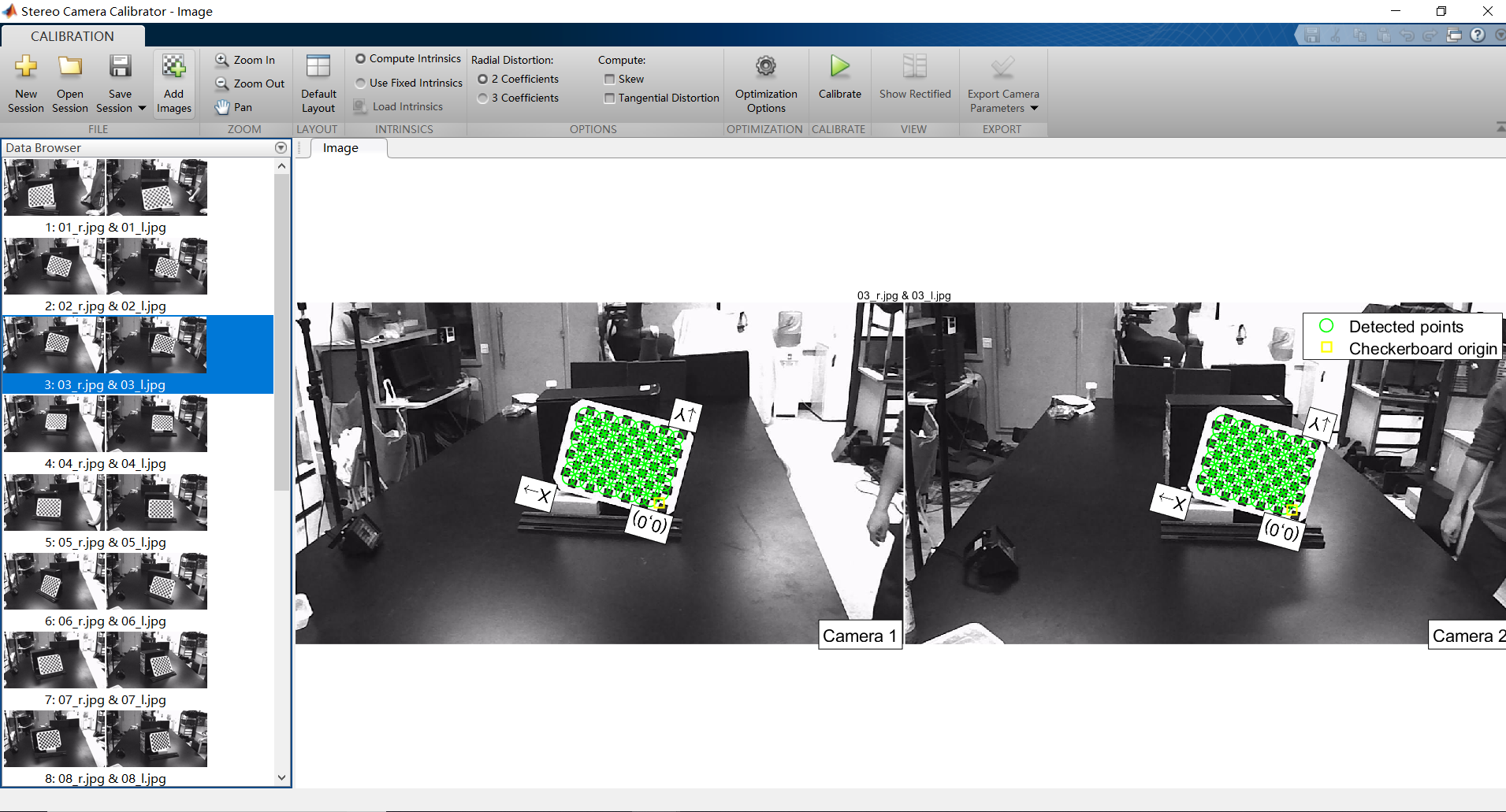
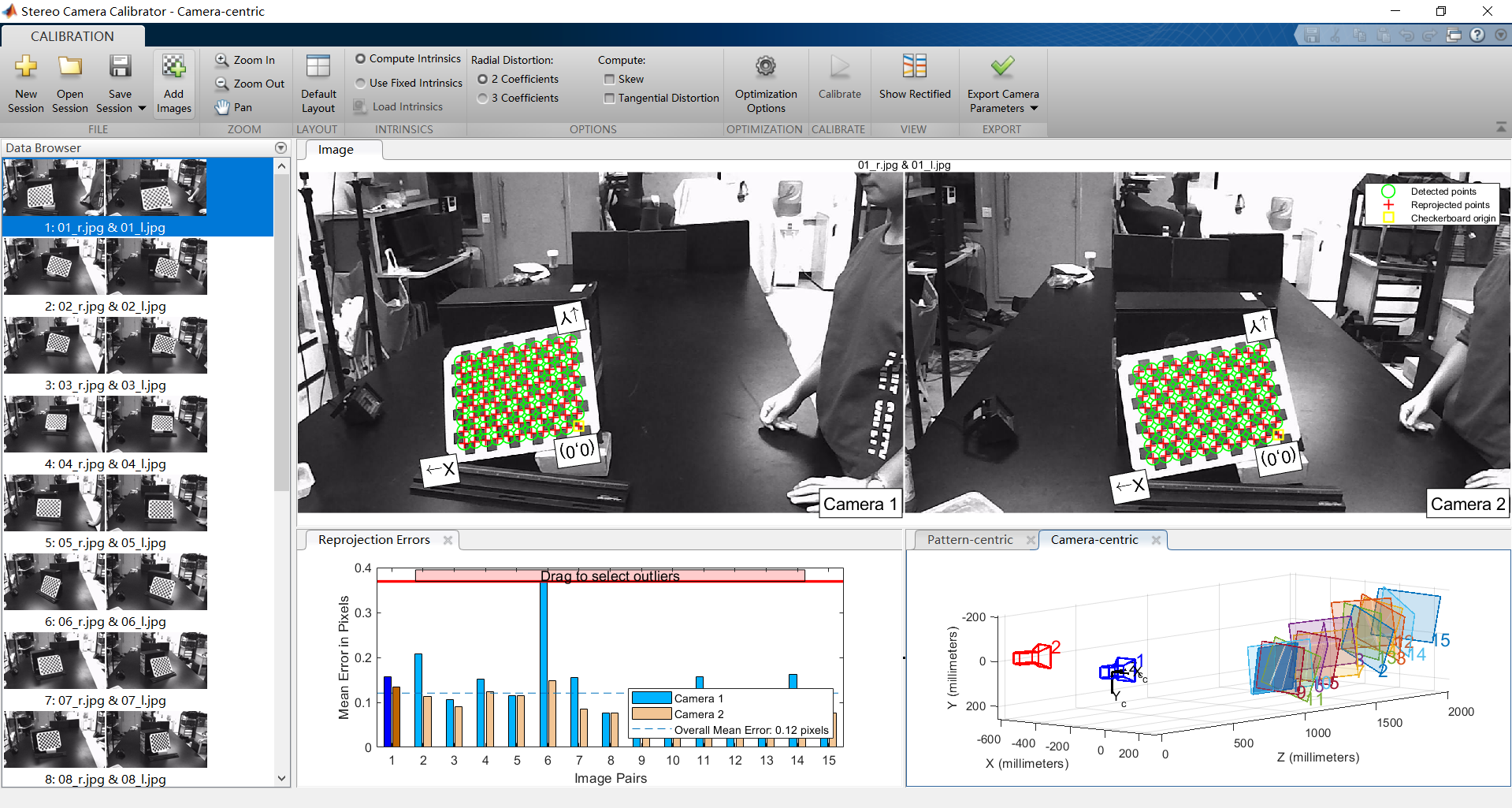
点击界面上方的Calibrate键,启动标定过程。在界面下方可以看到误差统计和可视化展示。
点击界面上方按钮Export Camera Parameters,即可导出标定结果。在matlab主界面可查看。

左右相机的内参数矩阵、畸变参数以及旋转矩、平移矩阵都可以得出。
下一节将会将利用标定结果,利用双目相机拍摄的原图上的任何一个平面点求取其空间坐标。有兴趣的小伙伴可以持续关注哦!!!!!!!!!!!!!!
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/140468.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
