大家好,又见面了,我是你们的朋友全栈君。
激光,英文名称为Light Amplification by Stimulated Emission of Radiation(简称LASER),意思为原子受激辐射的光,故称激光,激光的产生原理,是原子中的电子吸收能量后从低能级跃迁到高能级,再从高能级回落到低能级的时候,所释放的能量以光子的形式放出,被引诱(激发)出来的光子束(激光)。
激光与普通光源相比,具有单色性、高亮度、方向性等优势,被广泛应用于工业生产和科研实验等各个领域,激光测距便是其中应用较为广泛的一项技术。
1.激光测距技术的特点
激光测距技术是一项非接触式的工业测量技术,与传统的接触式测距技术相比具有以下的特点【1】:
(1).激光测距时,无需与测量表面进行接触,物体的表面不会产生形变
(2).激光测距时被测物体表面不会发生磨损,降低了额外的损失
(3).在很多特殊的环境下,没有条件用常规测量工具接触测量,只能使用激光测距技术
2.激光测距技术的原理
激光测距目前主要的测量方法有:激光脉冲测距、激光相位测距、激光三角法测距等,不同的测量方法对应不同常用的测量范围和精度,激光脉冲测距主要应用于远距离测距,测量距离在km级以上,精度较低,一般是米级精度;激光相位测距适用于中长距测量,常用测量范围包括50米、150米、300米、以及500米不等,精度较高,一般是毫米级精度;激光三角法测距则一般用于短距离(常见测量范围在2米以内),高精度的测距任务,一般精度能达到微米级,但测量距离较为限制。
(1)激光脉冲测距法【2】
激光脉冲测距法工作时,先由激光发射二极管对准目标发射激光脉冲。经目标反射后激光向各方向散射。部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有放大功能的光学传感器,因此它能检测极其微弱的光信号,并将其转化为相应的电信号。通过测量光脉冲往返待测点的时间,乘以光速并除以2,计算出被测目标的距离,计算公式如下:
D=ct/2
D:测量点A、B间的距离,c:光速,t:光脉冲往返AB两点间1次所需时间,
(2)激光相位测距【3】
激光相位测距的原理,是将一低频调制信号对发射光波的光强进行调制, 利用测定“调制光波”往返于被测距离的相位差, 间接求得待测距离D。 其距离的一般计算公式为:

其中,Փ:调制光在距离为 2D 上的相位差, c : 调制光的传播速度, t : 调制光在待测距离往返一次所需要的时间, f : 调制光的频率。
在图 1 中, A 表示调制光波的发射点, B 表示安置反射器的地点, A′表示所发出的调制光波经反射器反射后的接收地点。AA′两点间的距离即是待测距离D的2倍。 故: Փ =N1 2π+ΔՓ1 , 由于N1并不是一个定值, 所以这可能引起多值解。 为解决这一问题, 我们常采用多个频率的调制信号来测定同一距离。该频率在相位测距中也称为测尺频率,测尺频率的波长称为测尺长度,当被测距离小于测尺长度时, 则不存在多值解,由于测尺长度越大,测量精度就越低,所以出于精度的考虑,我们需要将测尺长度控制在合适的范围内。
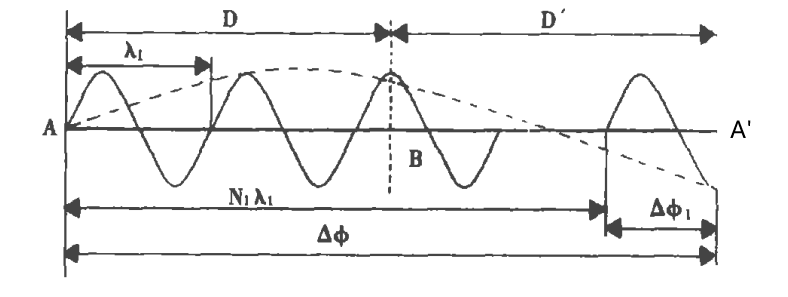

图1 激光相位测距的原理图【3】
(3)激光三角法测距【1】
使一束激光以特定角度照射到待测物体的参考位置上,然后激光在待测物体上会发生散射、漫反射,将光敏传感器件放置在另一特定位置接收经透镜汇聚后的散射光、漫反射光。待测物体发生位移后,再使一束激光以特定角度照射到待测物体的待测位置上,将光敏传感器期间放置在同一特定位置接收此时的散射光、漫反射光,因为待测物体位移前后激光散射漫反射后的光路不同,光敏传感器件上光斑中心位置也不同,将前后两次光斑中心位置代入几何三角关系中,从而计算出物体的位移距离。
3.相位式激光测距传感器的应用:
相位式激光测距传感器的应用非常广泛,其测量距离从几十米到几百米不等,精度一般在毫米级,与工业中大多数的应用需求相符合,相位式激光测距传感器的用途包括尺寸测量、位置测量、液位测量、形变监测、海啸/泥石流等自然灾害监测、定位等,根据不同的应用领域和工况,其作用也不同:
(1)金属工业
例如金属切割应用中,我们常常需要切割指定规格指定长度的金属,通过将激光测距设备安装在切割设备上,对切割长度进行监测,准确进行切割。此外还包括钢铁的锻造和灌装等,由于金属锻造时温度很高,激光测距传感器可以无接触的对金属的锻造工艺过程进行监测和控制,提高了工艺生产的效率。
(2)桥梁建筑
通过激光测距传感器对桥梁的上下桥面进行监测,监测桁架倾斜和变形;此外如历史建筑,包括教堂建筑等,对其进行保护不仅符合业主的利益,而且也是对业主的尊重。通过我们的激光测距传感器,我们可以监测这些建筑物的微小“移动”,以并对它们进行细致的监测和保护。
(3)轨道铁路
铁路的轨道监测包括铁路基础设施的监测,铁路隧道形变监测,山区铁路岩层的泥石流监测等
(4)仓储物流
例如常见激光测距传感器用于料仓的料位,物流卡车的位置监测与定位等
参考文献:
[1] 宋宇健. 基于CCD激光三角法测距系统的设计与实现[D].西安工业大学,2018.
[2] 激光传感器工作原理:http://article.cechina.cn/12/0412/03/20120412033047.htm
[3]王秀芳,王江,杨向东,王磊,吴志海.相位激光测距技术研究概述[J].激光杂志,2006(02):4-5.
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/139867.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...