大家好,又见面了,我是你们的朋友全栈君。
机械狗
写在前面
可能要写很长很久,可能一年吧
计划
目前我打算先做模拟,然后在模拟环境中设计控制器,全部调得很完美后再开始搭。平台选择是这样的:
| 阶段 | 平台 | 开始时间 |
|---|---|---|
| 搭建模拟环境 | matlab + simscape body | 07/2021 |
| 控制器设计 | matlab + simulink | 07/2021 |
| 实机代码 | C++ in ROS | 10/2021?? |
| 造狗 | 3D 打印 | 2022? |
目前对狗的器官是这么设想的:
| 部位 | 选材 |
|---|---|
| 大脑 (上位机) | Navida Jeston Nano |
| 小脑 (下位机) | STM32 F7+ |
| 关节 | 先用舵机,能动了再换电机 |
| 身体 | 先3D打印,可以了再CNC+表面处理 |
1 搭建模拟环境
1.1先模拟条简单的狗腿 (two-link)
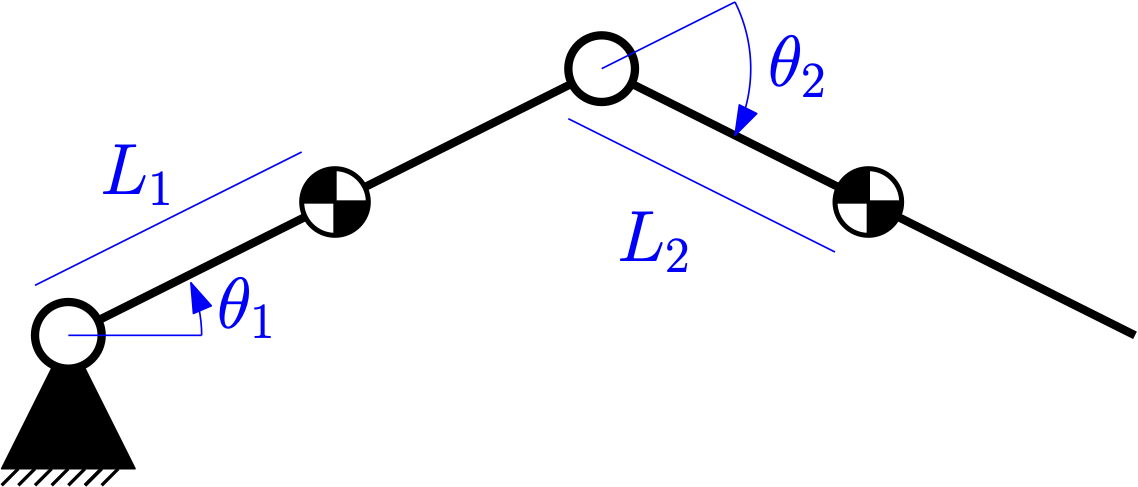

为了方便起见,先就忽略转动惯量了。这个其实应该没什么大事,毕竟我要造的玩具狗腿摆得又不会很快。这里第一个关节代表腿根部,两杆子的末端(end-effector,EE)是狗脚。
1.1.1 Forward Kinematics
这边我用matlab里symbolic math 来推导所有的kinematics.
这里x2 y2 是 EE 的位置。
sympref('AbbreviateOutput', false);
% prevent symbolic abbreviations
syms L1 L2 theta1 theta2
x1 = 2*L1*cos(theta1);
y1 = 2*L1*sin(theta1);
x2 = x1 + 2*L2*cos(theta1+theta2);
y2 = y1 + 2*L2*sin(theta1+theta2);
Xee= [x2;
y2] %end effector position
Matlab output: (直接复制symbolic 的latex code,然后最外面加四美元号)
( 2 L 2 cos ( θ 1 + θ 2 ) + 2 L 1 cos ( θ 1 ) 2 L 2 sin ( θ 1 + θ 2 ) + 2 L 1 sin ( θ 1 ) ) \left(\begin{array}{c} 2\,L_2 \,\cos \left(\theta_1 +\theta_2 \right)+2\,L_1 \,\cos \left(\theta_1 \right)\\ 2\,L_2 \,\sin \left(\theta_1 +\theta_2 \right)+2\,L_1 \,\sin \left(\theta_1 \right) \end{array}\right) (2L2cos(θ1+θ2)+2L1cos(θ1)2L2sin(θ1+θ2)+2L1sin(θ1))
最后把这个解析解变成一个可以输入数值的方程:
fk_two_link_func = matlabFunction(Xee)
1.1.2 Inverse Kinematics
Inverse Kinematics 就是给EE的位置算出达到这个位置时关节需要的角度。注意,kinematics完全不考虑外力啊什么的。
算这个inverse kinematics 有两种算法:
一种是手推,具体推法可以参考这个视频:
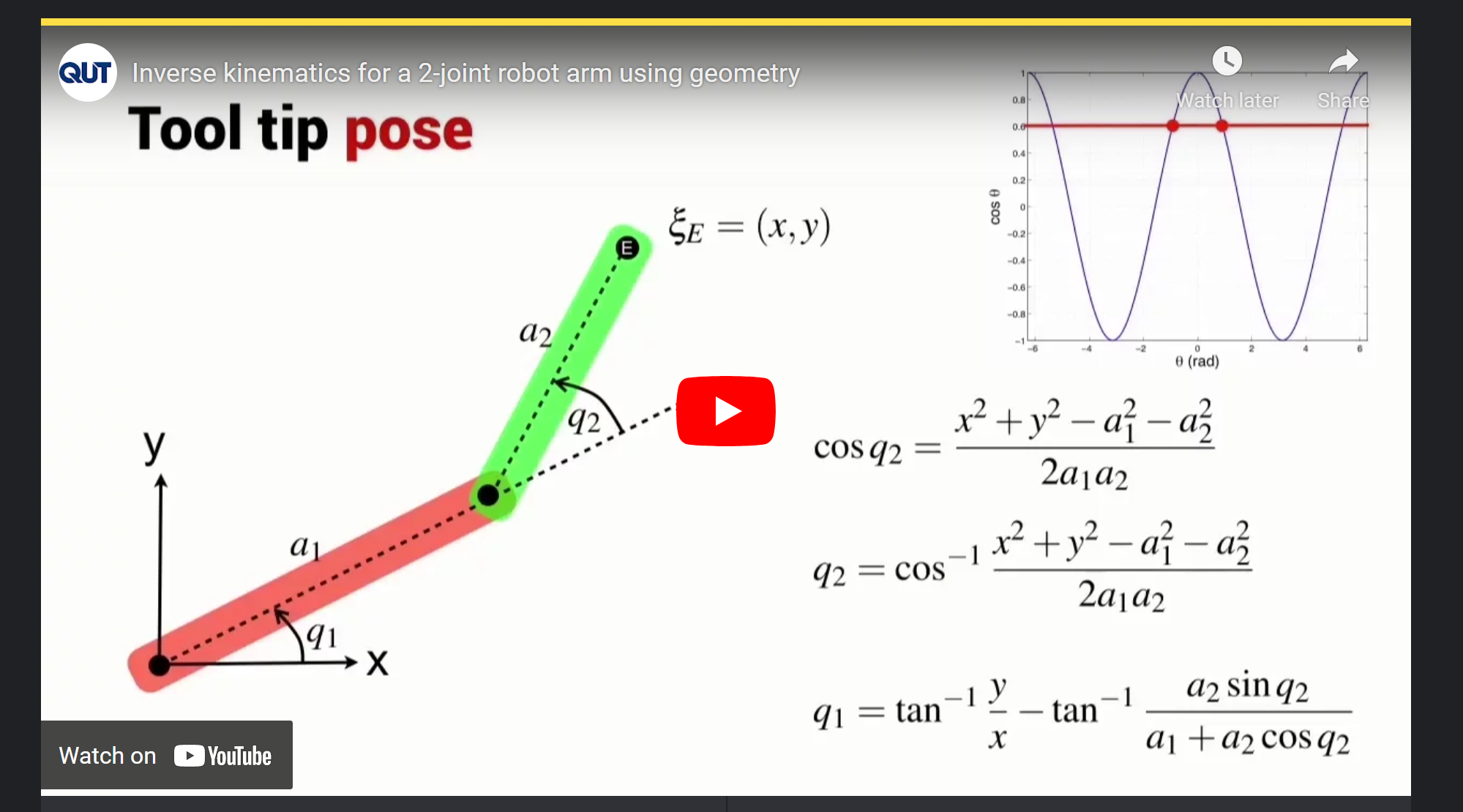
但这玩意有个问题,只能在第一象限用。本人对三角函数啥的一直没很彻底的 悟 。 所以也不知道为啥只能在第一象限用。
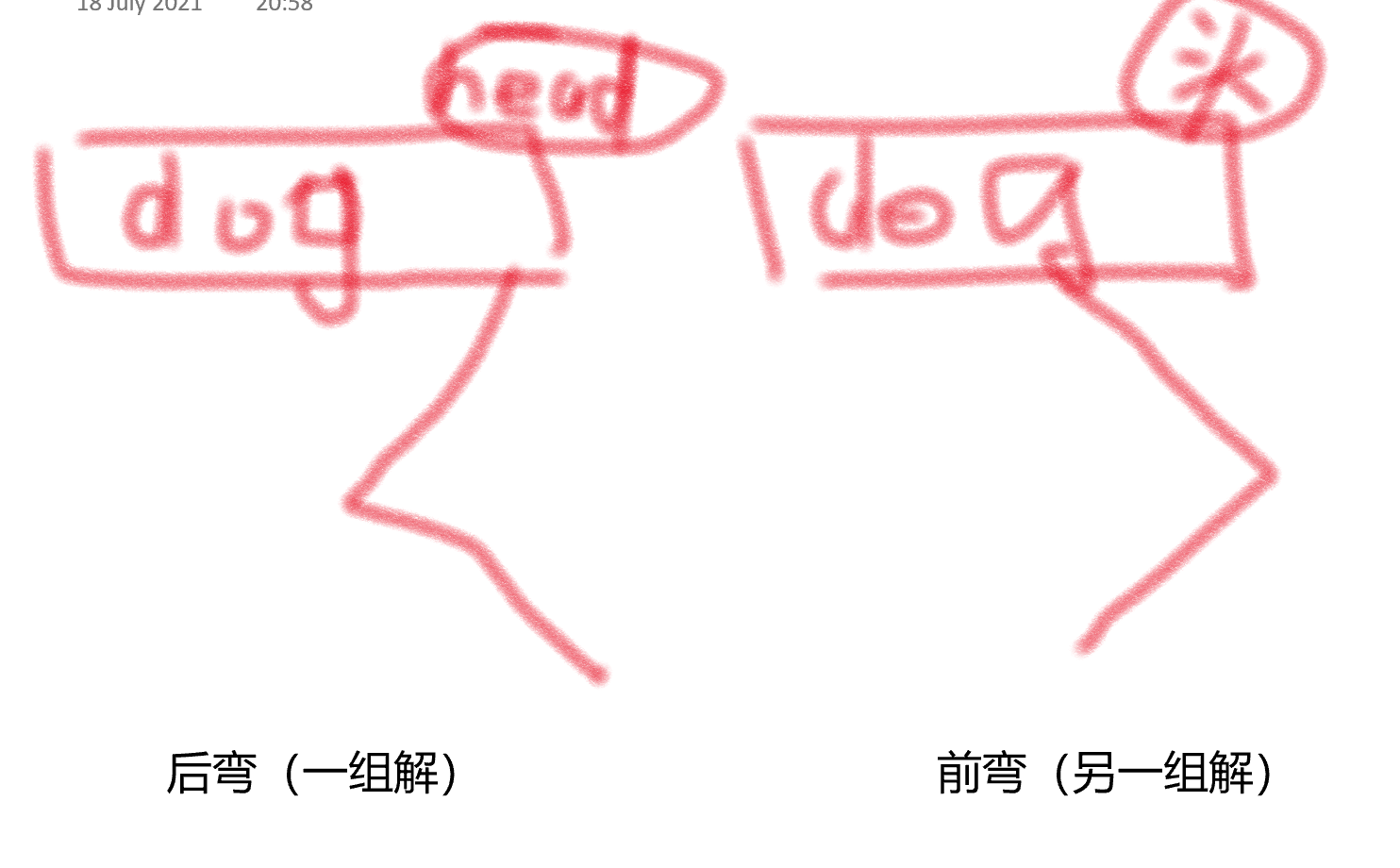
第二种是直接用symbolic math 自动推。好处是四个象限都能用,而且不可能出错。最重要的它能给出所有的解:选择适合的解能帮助我们实现狗腿是向前弯还是向后弯。
第三种是用matlab里的robotic toolbox,但我现在还没试过。
第二种方法代码如下,xt yt 是目标点的坐标:
sympref('AbbreviateOutput', false);
% prevent symbolic abbreviations
syms L1 L2 theta1 theta2
x1 = 2*L1*cos(theta1);
y1 = 2*L1*sin(theta1);
x2 = x1 + 2*L2*cos(theta1+theta2);
y2 = y1 + 2*L2*sin(theta1+theta2);
Xee= [x2;
y2]; %end effector position
syms xt yt
eq_ik_twolink_RHS = [xt;
yt];
Theta_twolink = [theta1;
theta2];
S_ik_twolink = solve(Xee==eq_ik_twolink_RHS,Theta_twolink);
ik_two_link = [S_ik_twolink.theta1;
S_ik_twolink.theta2];
ik_two_link = simplify(ik_two_link)
Output:
( 2 a t a n ( 4 L 1 y t + − 16 L 1 4 + 32 L 1 2 L 2 2 + 8 L 1 2 x t 2 + 8 L 1 2 y t 2 − 16 L 2 4 + 8 L 2 2 x t 2 + 8 L 2 2 y t 2 − x t 4 − 2 x t 2 y t 2 − y t 4 4 L 1 2 + 4 L 1 x t − 4 L 2 2 + x t 2 + y t 2 ) 2 a t a n ( 4 L 1 y t − − 16 L 1 4 + 32 L 1 2 L 2 2 + 8 L 1 2 x t 2 + 8 L 1 2 y t 2 − 16 L 2 4 + 8 L 2 2 x t 2 + 8 L 2 2 y t 2 − x t 4 − 2 x t 2 y t 2 − y t 4 4 L 1 2 + 4 L 1 x t − 4 L 2 2 + x t 2 + y t 2 ) − 2 a t a n ( ( − 4 L 1 2 + 8 L 1 L 2 − 4 L 2 2 + x t 2 + y t 2 ) ( 4 L 1 2 + 8 L 1 L 2 + 4 L 2 2 − x t 2 − y t 2 ) − 4 L 1 2 + 8 L 1 L 2 − 4 L 2 2 + x t 2 + y t 2 ) 2 a t a n ( ( − 4 L 1 2 + 8 L 1 L 2 − 4 L 2 2 + x t 2 + y t 2 ) ( 4 L 1 2 + 8 L 1 L 2 + 4 L 2 2 − x t 2 − y t 2 ) − 4 L 1 2 + 8 L 1 L 2 − 4 L 2 2 + x t 2 + y t 2 ) ) \left(\begin{array}{c} 2\,\mathrm{atan}\left(\frac{4\,L_1 \,\mathrm{yt}+\sqrt{-16\,{L_1 }^4 +32\,{L_1 }^2 \,{L_2 }^2 +8\,{L_1 }^2 \,{\mathrm{xt}}^2 +8\,{L_1 }^2 \,{\mathrm{yt}}^2 -16\,{L_2 }^4 +8\,{L_2 }^2 \,{\mathrm{xt}}^2 +8\,{L_2 }^2 \,{\mathrm{yt}}^2 -{\mathrm{xt}}^4 -2\,{\mathrm{xt}}^2 \,{\mathrm{yt}}^2 -{\mathrm{yt}}^4 }}{4\,{L_1 }^2 +4\,L_1 \,\mathrm{xt}-4\,{L_2 }^2 +{\mathrm{xt}}^2 +{\mathrm{yt}}^2 }\right)\\ 2\,\mathrm{atan}\left(\frac{4\,L_1 \,\mathrm{yt}-\sqrt{-16\,{L_1 }^4 +32\,{L_1 }^2 \,{L_2 }^2 +8\,{L_1 }^2 \,{\mathrm{xt}}^2 +8\,{L_1 }^2 \,{\mathrm{yt}}^2 -16\,{L_2 }^4 +8\,{L_2 }^2 \,{\mathrm{xt}}^2 +8\,{L_2 }^2 \,{\mathrm{yt}}^2 -{\mathrm{xt}}^4 -2\,{\mathrm{xt}}^2 \,{\mathrm{yt}}^2 -{\mathrm{yt}}^4 }}{4\,{L_1 }^2 +4\,L_1 \,\mathrm{xt}-4\,{L_2 }^2 +{\mathrm{xt}}^2 +{\mathrm{yt}}^2 }\right)\\ -2\,\mathrm{atan}\left(\frac{\sqrt{
{\left(-4\,{L_1 }^2 +8\,L_1 \,L_2 -4\,{L_2 }^2 +{\mathrm{xt}}^2 +{\mathrm{yt}}^2 \right)}\,{\left(4\,{L_1 }^2 +8\,L_1 \,L_2 +4\,{L_2 }^2 -{\mathrm{xt}}^2 -{\mathrm{yt}}^2 \right)}}}{-4\,{L_1 }^2 +8\,L_1 \,L_2 -4\,{L_2 }^2 +{\mathrm{xt}}^2 +{\mathrm{yt}}^2 }\right)\\ 2\,\mathrm{atan}\left(\frac{\sqrt{
{\left(-4\,{L_1 }^2 +8\,L_1 \,L_2 -4\,{L_2 }^2 +{\mathrm{xt}}^2 +{\mathrm{yt}}^2 \right)}\,{\left(4\,{L_1 }^2 +8\,L_1 \,L_2 +4\,{L_2 }^2 -{\mathrm{xt}}^2 -{\mathrm{yt}}^2 \right)}}}{-4\,{L_1 }^2 +8\,L_1 \,L_2 -4\,{L_2 }^2 +{\mathrm{xt}}^2 +{\mathrm{yt}}^2 }\right) \end{array}\right) ⎝⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎛2atan(4L12+4L1xt−4L22+xt2+yt24L1yt+−16L14+32L12L22+8L12xt2+8L12yt2−16L24+8L22xt2+8L22yt2−xt4−2xt2yt2−yt4)2atan(4L12+4L1xt−4L22+xt2+yt24L1yt−−16L14+32L12L22+8L12xt2+8L12yt2−16L24+8L22xt2+8L22yt2−xt4−2xt2yt2−yt4)−2atan(−4L12+8L1L2−4L22+xt2+yt2(−4L12+8L1L2−4L22+xt2+yt2)(4L12+8L1L2+4L22−xt2−yt2))2atan(−4L12+8L1L2−4L22+xt2+yt2(−4L12+8L1L2−4L22+xt2+yt2)(4L12+8L1L2+4L22−xt2−yt2))⎠⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎞
注意,这里一共有四个输出,分别依次对应theta1的两个解,theta2的两个解。这样形成的两组解就对应那张前弯后弯图里情况。
把这个解也变成方程,
ik_two_link_func = matlabFunction(ik_two_link)
然后我们验证下:给定一个目标点的xy坐标,然后用inverse kinematics 算出角度。再把这角度带到forward kinematics 里,得到的答案应该和最开始的目标点重合。
L_twolink = [0.5 0.5] %meters, L1 L2;
Xtest = [1.1 1]; %meters, xtarget ytarget
ang_from_ik_two_link = ik_two_link_func( L_twolink(1),L_twolink(1),...
Xtest(1),Xtest(2) )
%Note there are four outputs. They correspond to: theta1_solution_1, theta1_solution_2, theta2_solution_1 and theta2_solution_2.
posi_from_fk_two_link = fk_two_link_func ( L_twolink(1),L_twolink(1),...
ang_from_ik_two_link(1), ...
ang_from_ik_two_link(3) )
接下来,我们到SIMSCAPE 里验证下:(以后可能会放出源码)
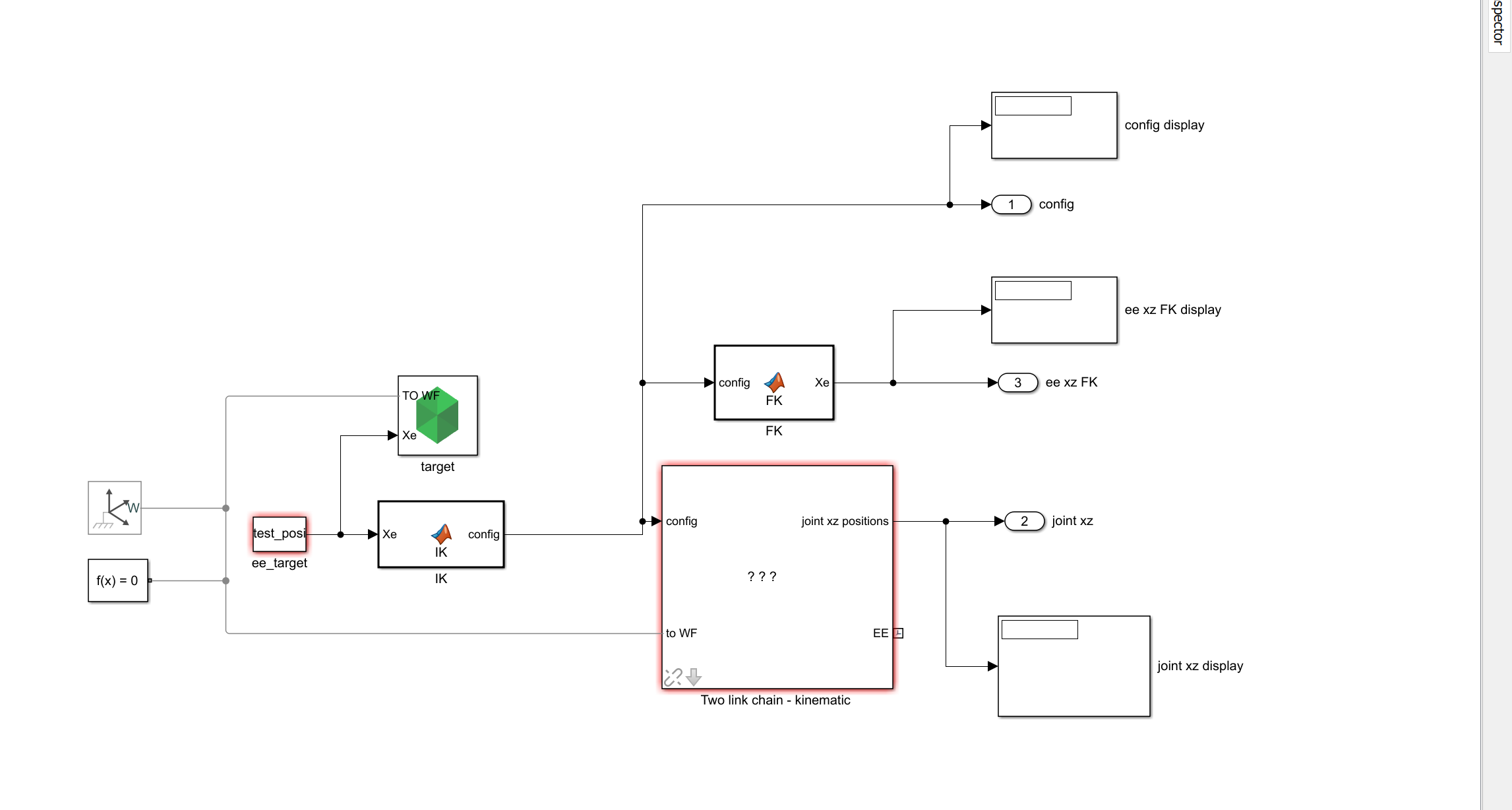
open_system('twolink_inverse_kinematics_w2')
% Set target postion and link length using polar cooridinate
% link one length = 2*L1
rho_two_link = [1;
1]; %L1 L2 = 0.5m
rho = rho_two_link;
max_length_two_link = rho_two_link(1) + rho_two_link(2);
test_ang = 5.7;
test_length = 1.5;
test_posi = [cos(test_ang)*test_length;
sin(test_ang)*test_length]
sim('twolink_inverse_kinematics_w2');
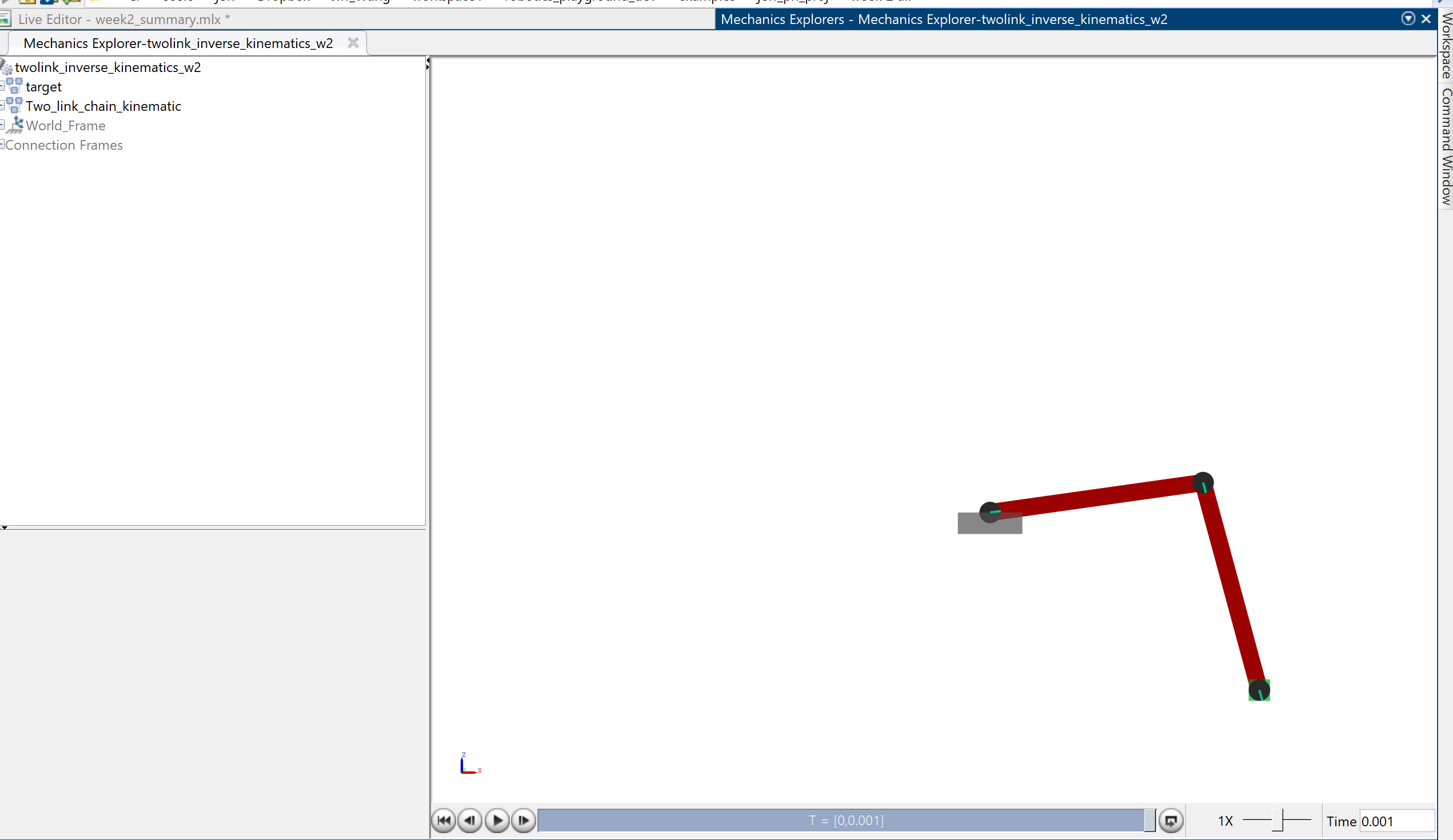
绿色的方块是目标点,可以看到EE完全到了目标点了。
1.1.3 Forward Dynamics
Dynamics 就要开始考虑力啦。这里我们会用拉格朗日法来算出动力学模型(是运动学还是动力学啊,有点分不清)。Again, 还是用symbolic math来自动推导 (symbolic 算lagragian 真的太爽啦啦啦啦)。
先定义下symbolic variable, 还是根据这张图来
clear all;
close all;
clc;
sympref('AbbreviateOutput', false); % prevent symbolic abbreviations
syms theta1 theta2 ...
theta_dot_1 theta_dot_2 ...
theta_ddot_1 theta_ddot_2 ...
L1 L2 m1 m2 ...
t g
然后开始算lagrangian啦!注意,和之前不同的是,x1y1和x2y2代表了两个质点的位置,而不是之前kinematics推导中节点的位置
%Find position of two point mass in terms of the generalised coordinate %theta1 and theta2.
x1 = L1*cos(theta1);
y1 = L1*sin(theta1);
x2 = 2*x1 + L2*cos(theta1+theta2);
y2 = 2*y1 + L2*sin(theta1+theta2);
[x1 x2;
y1 y2]
%Find velocity of the two point mass
x1_dot = diff(x1,theta1)*theta_dot_1 + diff(x1,theta2)*theta_dot_2;
x2_dot = diff(x2,theta1)*theta_dot_1 + diff(x2,theta2)*theta_dot_2;
y1_dot = diff(y1,theta1)*theta_dot_1 + diff(y1,theta2)*theta_dot_2;
y2_dot = diff(y2,theta1)*theta_dot_1 + diff(y2,theta2)*theta_dot_2;
[x1_dot, x2_dot;
y1_dot, y2_dot];
%Find T U and L
T = 0.5*m1*(x1_dot^2+y1_dot^2) + ...
0.5*m2*(x2_dot^2+y2_dot^2);
U = (m1*g*L1*sin(theta1) + ...
m2*g*(2*L1*sin(theta1)+L2*sin(theta1+theta2) ));
L = T - U;
(好想吐槽CSDN的代码片,为什么就没有matlab的代码片啊啊。)
接下来用这个公式算运动学方程:
d d t ( ∂ L ∂ θ ˙ i ) − ( ∂ L ∂ θ i ) = F \frac{d}{dt} \left( \frac{\partial \mathbf{L}}{\partial \dot{\mathbf{\theta}}_i} \right) – \left( \frac{\partial \mathbf{L}}{\partial \mathbf{\theta}_i} \right) =\mathbf{F} dtd(∂θ˙i∂L)−(∂θi∂L)=F
这边要稍微提下,这里的F是generalised force. 当generalised coordinate 是translational时,它的物理形式为力(单位N),相反,当generalised coordinate 是rotational时,(比如 角度),它的物理形式为力矩。这里,所有的机械臂/狗腿的推导都是基于generalised coordinate 为角度的形式,所以这里的F为力矩。
接下来开始用symbolic来算上面那公式里的每个项了。先暂时忽略F,因为可以最后再加上。还有这里要用不少chain rule, 建议拿只笔写写思考下。
dL_dtheta_dot_1 = diff(L,theta_dot_1);
dL_dtheta_dot_2 = diff(L,theta_dot_2);
dL_dtheta1 = diff(L,theta1);
dL_dtheta2 = diff(L,theta2);
d__dL_dtheta_dot_1__dt = diff(dL_dtheta_dot_1,theta1)*theta_dot_1 + ...
diff(dL_dtheta_dot_1,theta2)*theta_dot_2 + ...
diff(dL_dtheta_dot_1,theta_dot_1)*theta_ddot_1 + ...
diff(dL_dtheta_dot_1,theta_dot_2)*theta_ddot_2;
d__dL_dtheta_dot_2__dt = diff(dL_dtheta_dot_2,theta1)*theta_dot_1 + ...
diff(dL_dtheta_dot_2,theta2)*theta_dot_2 + ...
diff(dL_dtheta_dot_2,theta_dot_1)*theta_ddot_1 + ...
diff(dL_dtheta_dot_2,theta_dot_2)*theta_ddot_2;
d__dL_dtheta_dot__dt = [d__dL_dtheta_dot_1__dt;
d__dL_dtheta_dot_2__dt];
dL_dtheta = [dL_dtheta1;
dL_dtheta2];
然后就解出来了
%Eq will the forward dynamics. We assume there is no generalised force here.
eq = simplify(d__dL_dtheta_dot__dt - dL_dtheta,'Steps',10);
对,就解完啦。贴下答案,但没啥可视性。
两个运动学方程:
( L 1 2 m 1 θ ¨ 1 + 4 L 1 2 m 2 θ ¨ 1 + L 2 2 m 2 θ ¨ 1 + L 2 2 m 2 θ ¨ 2 + L 2 g m 2 cos ( θ 1 + θ 2 ) + L 1 g m 1 cos ( θ 1 ) + 2 L 1 g m 2 cos ( θ 1 ) − 2 L 1 L 2 m 2 θ ˙ 2 2 sin ( θ 2 ) + 4 L 1 L 2 m 2 θ ¨ 1 cos ( θ 2 ) + 2 L 1 L 2 m 2 θ ¨ 2 cos ( θ 2 ) − 4 L 1 L 2 m 2 θ ˙ 1 θ ˙ 2 sin ( θ 2 ) L 2 m 2 ( 2 L 1 sin ( θ 2 ) θ ˙ 1 2 + L 2 θ ¨ 1 + L 2 θ ¨ 2 + g cos ( θ 1 + θ 2 ) + 2 L 1 θ ¨ 1 cos ( θ 2 ) ) ) \left(\begin{array}{c} {L_1 }^2 \,m_1 \,{\ddot{\theta} }_1 +4\,{L_1 }^2 \,m_2 \,{\ddot{\theta} }_1 +{L_2 }^2 \,m_2 \,{\ddot{\theta} }_1 +{L_2 }^2 \,m_2 \,{\ddot{\theta} }_2 +L_2 \,g\,m_2 \,\cos \left(\theta_1 +\theta_2 \right)+L_1 \,g\,m_1 \,\cos \left(\theta_1 \right)+2\,L_1 \,g\,m_2 \,\cos \left(\theta_1 \right)-2\,L_1 \,L_2 \,m_2 \,{
{\dot{\theta} }_2 }^2 \,\sin \left(\theta_2 \right)+4\,L_1 \,L_2 \,m_2 \,{\ddot{\theta} }_1 \,\cos \left(\theta_2 \right)+2\,L_1 \,L_2 \,m_2 \,{\ddot{\theta} }_2 \,\cos \left(\theta_2 \right)-4\,L_1 \,L_2 \,m_2 \,{\dot{\theta} }_1 \,{\dot{\theta} }_2 \,\sin \left(\theta_2 \right)\\ L_2 \,m_2 \,{\left(2\,L_1 \,\sin \left(\theta_2 \right)\,{
{\dot{\theta} }_1 }^2 +L_2 \,{\ddot{\theta} }_1 +L_2 \,{\ddot{\theta} }_2 +g\,\cos \left(\theta_1 +\theta_2 \right)+2\,L_1 \,{\ddot{\theta} }_1 \,\cos \left(\theta_2 \right)\right)} \end{array}\right) (L12m1θ¨1+4L12m2θ¨1+L22m2θ¨1+L22m2θ¨2+L2gm2cos(θ1+θ2)+L1gm1cos(θ1)+2L1gm2cos(θ1)−2L1L2m2θ˙22sin(θ2)+4L1L2m2θ¨1cos(θ2)+2L1L2m2θ¨2cos(θ2)−4L1L2m2θ˙1θ˙2sin(θ2)L2m2(2L1sin(θ2)θ˙12+L2θ¨1+L2θ¨2+gcos(θ1+θ2)+2L1θ¨1cos(θ2)))
1.1.4 Inverse Dynamics
然后呢,我们希望能找出个特thetaddot = balala的方程。 在忽略generalised force的情况下(在three-link时会考虑到,这里偷懒先略过),可以直接用matlab built-in的方程解出来。这就是inverse dynamics:
thetaddot_1 and thetaddot2: (通过”solve”来解的)
Theta_ddot = [theta_ddot_1;
theta_ddot_2];
Theta_dot = [theta_dot_1;
theta_dot_2];
Theta = [theta1;
theta2];
Use solve function to get theta_ddot_1 and theta_ddot_2
This is inverse dynamics!
S = solve(eq == [0;0],Theta_ddot); %solve to get theta1ddot and theta2ddot eq
[S.theta_ddot_1;
S.theta_ddot_2]
( 2 g m 2 cos ( θ 1 + θ 2 ) cos ( θ 2 ) − 2 g m 2 cos ( θ 1 ) − g m 1 cos ( θ 1 ) + 2 L 2 m 2 θ ˙ 1 2 sin ( θ 2 ) + 2 L 2 m 2 θ ˙ 2 2 sin ( θ 2 ) + 4 L 1 m 2 θ ˙ 1 2 cos ( θ 2 ) sin ( θ 2 ) + 4 L 2 m 2 θ ˙ 1 θ ˙ 2 sin ( θ 2 ) − 4 L 1 m 2 cos ( θ 2 ) 2 + L 1 m 1 + 4 L 1 m 2 − L 1 g m 1 cos ( θ 1 + θ 2 ) + 4 L 1 g m 2 cos ( θ 1 + θ 2 ) + 2 L 1 2 m 1 θ ˙ 1 2 sin ( θ 2 ) + 8 L 1 2 m 2 θ ˙ 1 2 sin ( θ 2 ) + 2 L 2 2 m 2 θ ˙ 1 2 sin ( θ 2 ) + 2 L 2 2 m 2 θ ˙ 2 2 sin ( θ 2 ) − L 2 g m 1 cos ( θ 1 ) − 2 L 2 g m 2 cos ( θ 1 ) + 2 L 2 g m 2 cos ( θ 1 + θ 2 ) cos ( θ 2 ) − 2 L 1 g m 1 cos ( θ 1 ) cos ( θ 2 ) − 4 L 1 g m 2 cos ( θ 1 ) cos ( θ 2 ) + 4 L 2 2 m 2 θ ˙ 1 θ ˙ 2 sin ( θ 2 ) + 8 L 1 L 2 m 2 θ ˙ 1 2 cos ( θ 2 ) sin ( θ 2 ) + 4 L 1 L 2 m 2 θ ˙ 2 2 cos ( θ 2 ) sin ( θ 2 ) + 8 L 1 L 2 m 2 θ ˙ 1 θ ˙ 2 cos ( θ 2 ) sin ( θ 2 ) − 4 L 1 L 2 m 2 cos ( θ 2 ) 2 + L 1 L 2 m 1 + 4 L 1 L 2 m 2 ) \left(\begin{array}{c} \frac{2\,g\,m_2 \,\cos \left(\theta_1 +\theta_2 \right)\,\cos \left(\theta_2 \right)-2\,g\,m_2 \,\cos \left(\theta_1 \right)-g\,m_1 \,\cos \left(\theta_1 \right)+2\,L_2 \,m_2 \,{
{\dot{\theta} }_1 }^2 \,\sin \left(\theta_2 \right)+2\,L_2 \,m_2 \,{
{\dot{\theta} }_2 }^2 \,\sin \left(\theta_2 \right)+4\,L_1 \,m_2 \,{
{\dot{\theta} }_1 }^2 \,\cos \left(\theta_2 \right)\,\sin \left(\theta_2 \right)+4\,L_2 \,m_2 \,{\dot{\theta} }_1 \,{\dot{\theta} }_2 \,\sin \left(\theta_2 \right)}{-4\,L_1 \,m_2 \,{\cos \left(\theta_2 \right)}^2 +L_1 \,m_1 +4\,L_1 \,m_2 }\\ -\frac{L_1 \,g\,m_1 \,\cos \left(\theta_1 +\theta_2 \right)+4\,L_1 \,g\,m_2 \,\cos \left(\theta_1 +\theta_2 \right)+2\,{L_1 }^2 \,m_1 \,{
{\dot{\theta} }_1 }^2 \,\sin \left(\theta_2 \right)+8\,{L_1 }^2 \,m_2 \,{
{\dot{\theta} }_1 }^2 \,\sin \left(\theta_2 \right)+2\,{L_2 }^2 \,m_2 \,{
{\dot{\theta} }_1 }^2 \,\sin \left(\theta_2 \right)+2\,{L_2 }^2 \,m_2 \,{
{\dot{\theta} }_2 }^2 \,\sin \left(\theta_2 \right)-L_2 \,g\,m_1 \,\cos \left(\theta_1 \right)-2\,L_2 \,g\,m_2 \,\cos \left(\theta_1 \right)+2\,L_2 \,g\,m_2 \,\cos \left(\theta_1 +\theta_2 \right)\,\cos \left(\theta_2 \right)-2\,L_1 \,g\,m_1 \,\cos \left(\theta_1 \right)\,\cos \left(\theta_2 \right)-4\,L_1 \,g\,m_2 \,\cos \left(\theta_1 \right)\,\cos \left(\theta_2 \right)+4\,{L_2 }^2 \,m_2 \,{\dot{\theta} }_1 \,{\dot{\theta} }_2 \,\sin \left(\theta_2 \right)+8\,L_1 \,L_2 \,m_2 \,{
{\dot{\theta} }_1 }^2 \,\cos \left(\theta_2 \right)\,\sin \left(\theta_2 \right)+4\,L_1 \,L_2 \,m_2 \,{
{\dot{\theta} }_2 }^2 \,\cos \left(\theta_2 \right)\,\sin \left(\theta_2 \right)+8\,L_1 \,L_2 \,m_2 \,{\dot{\theta} }_1 \,{\dot{\theta} }_2 \,\cos \left(\theta_2 \right)\,\sin \left(\theta_2 \right)}{-4\,L_1 \,L_2 \,m_2 \,{\cos \left(\theta_2 \right)}^2 +L_1 \,L_2 \,m_1 +4\,L_1 \,L_2 \,m_2 } \end{array}\right) ⎝⎛−4L1m2cos(θ2)2+L1m1+4L1m22gm2cos(θ1+θ2)cos(θ2)−2gm2cos(θ1)−gm1cos(θ1)+2L2m2θ˙12sin(θ2)+2L2m2θ˙22sin(θ2)+4L1m2θ˙12cos(θ2)sin(θ2)+4L2m2θ˙1θ˙2sin(θ2)−−4L1L2m2cos(θ2)2+L1L2m1+4L1L2m2L1gm1cos(θ1+θ2)+4L1gm2cos(θ1+θ2)+2L12m1θ˙12sin(θ2)+8L12m2θ˙12sin(θ2)+2L22m2θ˙12sin(θ2)+2L22m2θ˙22sin(θ2)−L2gm1cos(θ1)−2L2gm2cos(θ1)+2L2gm2cos(θ1+θ2)cos(θ2)−2L1gm1cos(θ1)cos(θ2)−4L1gm2cos(θ1)cos(θ2)+4L22m2θ˙1θ˙2sin(θ2)+8L1L2m2θ˙12cos(θ2)sin(θ2)+4L1L2m2θ˙22cos(θ2)sin(θ2)+8L1L2m2θ˙1θ˙2cos(θ2)sin(θ2)⎠⎞
未完
1.2 模拟个复杂点的狗腿 (three/four-link)
1.3 搭个全身
1.4 加入Contact modelling
1.5 合到一起
2 控制器设计
2.1 PD controll
2.2 Impedance/force control
2.2.1 Spring-damper system analgue
2.2.2 Implementaion
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/135366.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
