大家好,又见面了,我是你们的朋友全栈君。
参考:https://blog.csdn.net/yaked/article/details/77161160?utm_medium=distribute.pc_relevant_t0.none-task-blog-BlogCommendFromBaidu-1.control&depth_1-utm_source=distribute.pc_relevant_t0.none-task-blog-BlogCommendFromBaidu-1.control
什么是手眼标定
手眼标定是为了得到相机坐标系与机器人坐标系之间的位姿关系,包括两种:eye in hand (相机安装在机械臂末端)和eye to hand (相机安装在机械臂外侧)。
手眼标定的目的
在机械臂抓取时,往往需要知道抓取目标与机械臂之间的位置关系,使用相机获得抓取目标的位置是有效的方法。
但是单纯使用相机得到的目标点位置是在相机坐标系下的位置,而抓取任务要得到的是目标点与机械臂之间的位置,因此这中间需要通过一些方法获得相机与机械臂之间的位置关系,从而实现目标点从相机坐标系到机械臂坐标系的转换。手眼标定正是用来获得相机与机械臂之间位置关系的一种方法。
简单讲,已知目标点A与相机B之间的坐标关系(相机获得),想要得到机械臂C与目标点A之间的坐标关系,就必须得到相机B与机械臂C之间的位置关系。
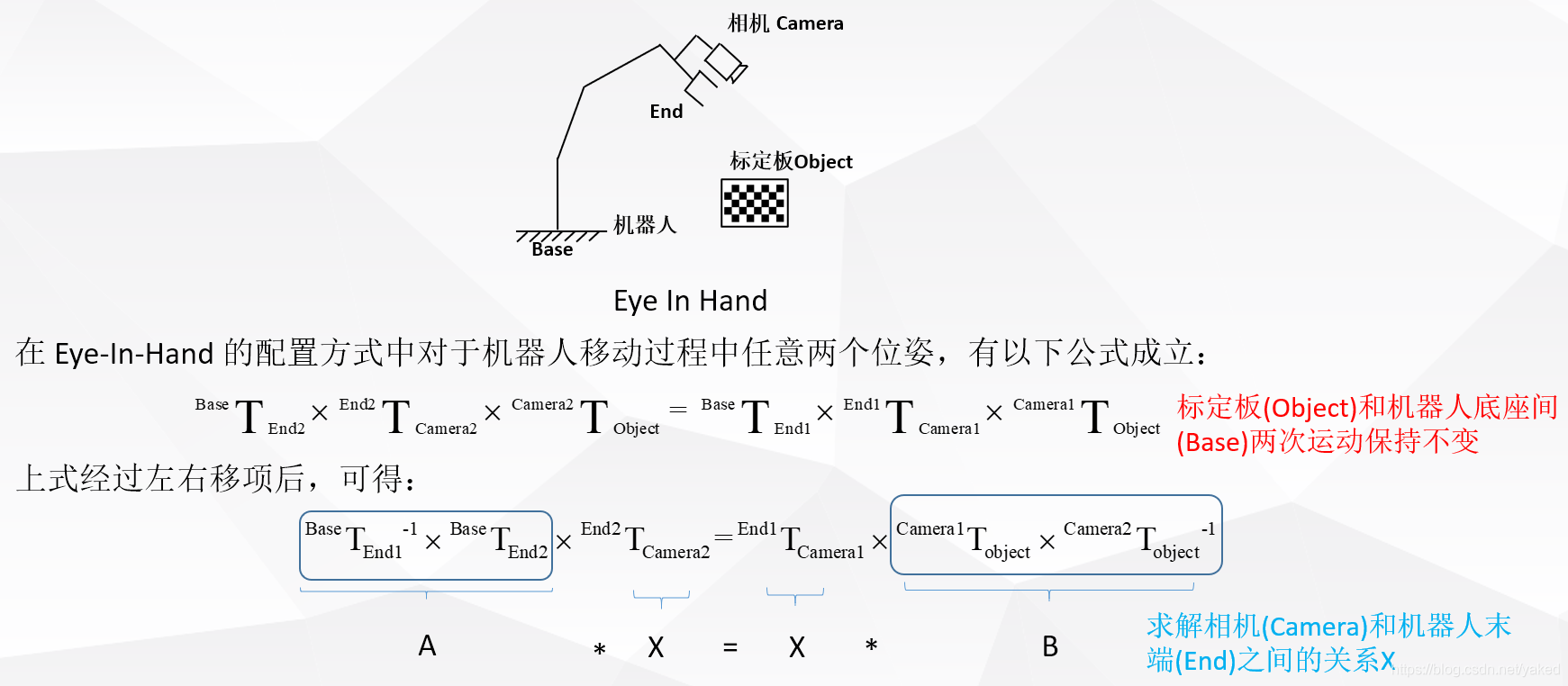
eye in hand
这种方式的手眼标定是通过两次运动解得相机坐标系(Camera)与机械臂末端坐标系(End)之间的坐标关系。
注意:
1、机械臂末端(End)在机器人(Base)坐标系下的坐标是可以通过机械臂各个关节的角度值直接解算出来的。
2、标定是通过两次改变机械臂末端(相机)位置来解算的,这整个过程中标定板(Object)相对是机器人(Base)的位置是固定不变的。(实际上,并不需要知道标定板与机器人(Base)的具体位置关系)。下面等式成立的条件就是两个不同位姿下标定板与机器人位置不变。

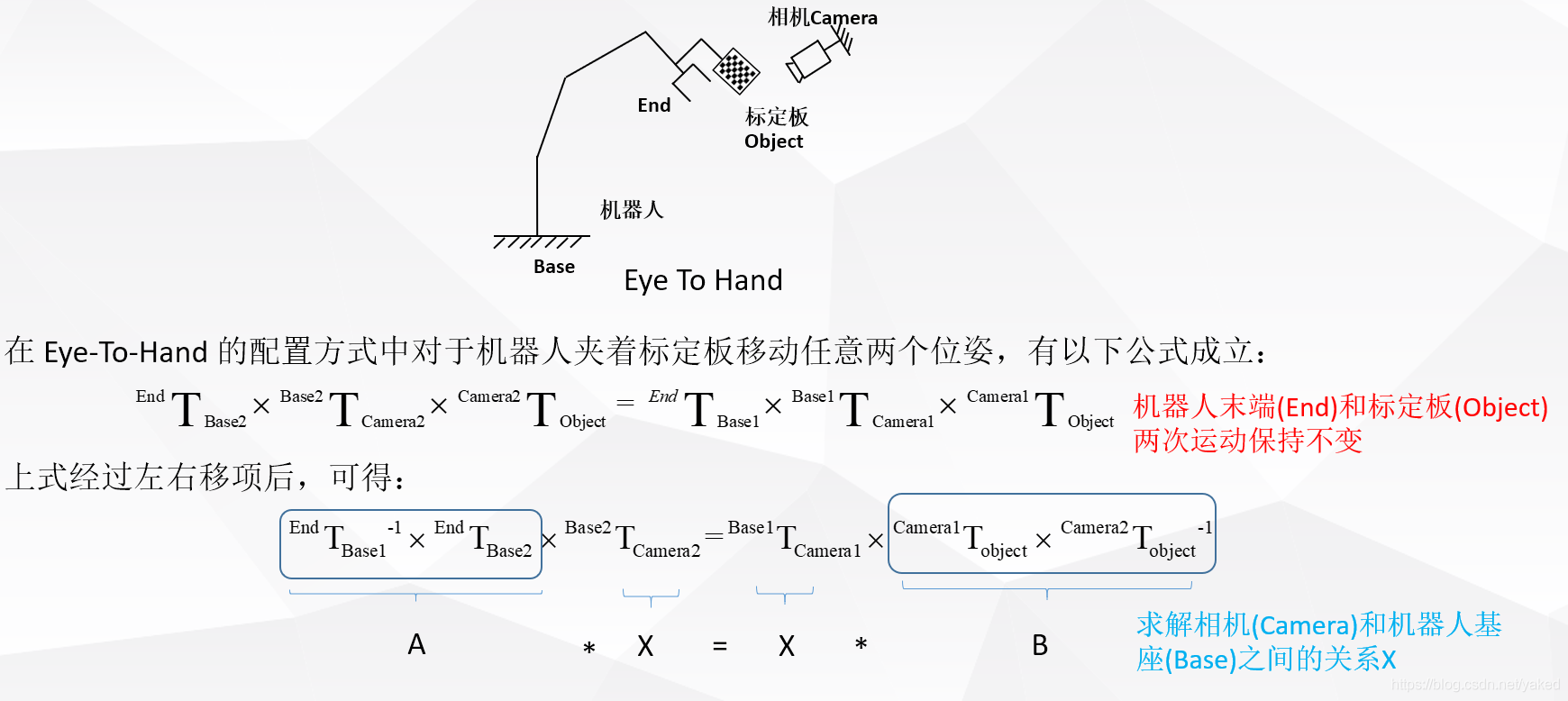
eye to hand
这种方法的手眼标定是通过两次运动解得相机坐标系(Camera)与机器人坐标系(Base)之间的坐标关系。
注意:
1、机械臂末端(End)在机器人(Base)坐标系下的坐标是可以通过机械臂各个关节的角度值直接解算出来的。
2、标定是通过两次改变机械臂末端(标定板)位置来解算的,这整个过程中标定板(Object)相对机械臂末端(End)的位置是固定不变的。(实际上,并不需要知道标定板与机械臂末端(End)的具体位置关系)。下面等式成立的条件就是两个不同位姿下标定板与机械臂末端位置不变。
AX=XB问题的求解
实际上,求解的只是一个固定的6自由度的位置姿态关系,可以用3X3的旋转矩阵和3X1的平移矩阵表示,也可以用其他方法表示如用四元数表示角度关系等。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/133111.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
