大家好,又见面了,我是你们的朋友全栈君。
2020-09-14
无刷直流电机及其控制策略(学习笔记)
传统无刷直流电机安装的霍尔传感器增加了电机的体积和成本、可靠性低、抗干扰能力弱。因此提出了无刷直流电机无位置传感器控制策略,解决了传递霍尔传感器的弊端。
1.无刷直流电机
无刷直流电机是指具有串励直流电机起动特性和并励直流电机调速特性的梯形波/方波直流电机。
基本结构由电机本体、功率驱动电路以及位置传感器组成。无刷直流电机为实现无机械接触式换相,取消了电刷。并将电枢绕组和永磁磁钢分别放在定子和转子侧。为了控制电机转速和转向,无刷直流电机必须具有由转子位置传感器和逆变器(直流电变成交流电)等共同构成的换相装置。
绕组形式绕组形式的不同将影响电机的反电动势波形。绕组形式主要有:整距集中绕组、整距分布绕组、短距分布绕组等。整距集中绕组能得到较好的梯形反电动势波形,短距绕组有利于削弱转矩波动。
转子结构表面粘贴式磁极、嵌入式磁极和环形磁极。
位置传感器电磁式、光电式和磁敏式。Hall传感器为磁敏式位置传感器,集成电路可将Hall传感器的位置信号直接变成数字信号,有利于无刷电机控制。
无刷直流电机驱动拓扑机构
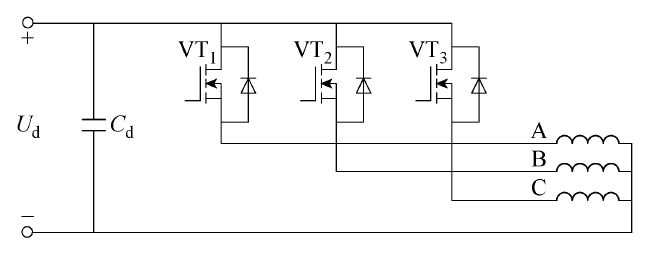
1)半桥式。一个周期内每相绕组只有1/3周期通电,转矩波动较大,电机绕组利用率低。

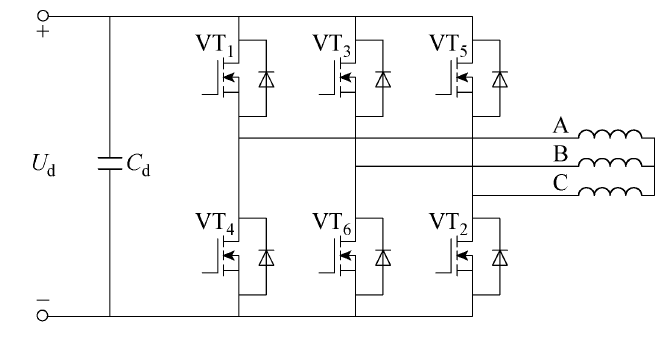
2)全桥式。两两导通方式和三三导通方式。两两导通方式指每一时刻都有两相导通,各项导通顺序和时间由转子位置信号决定。三三导通方式指每一瞬间逆变桥均有三支功率器件同时导通。
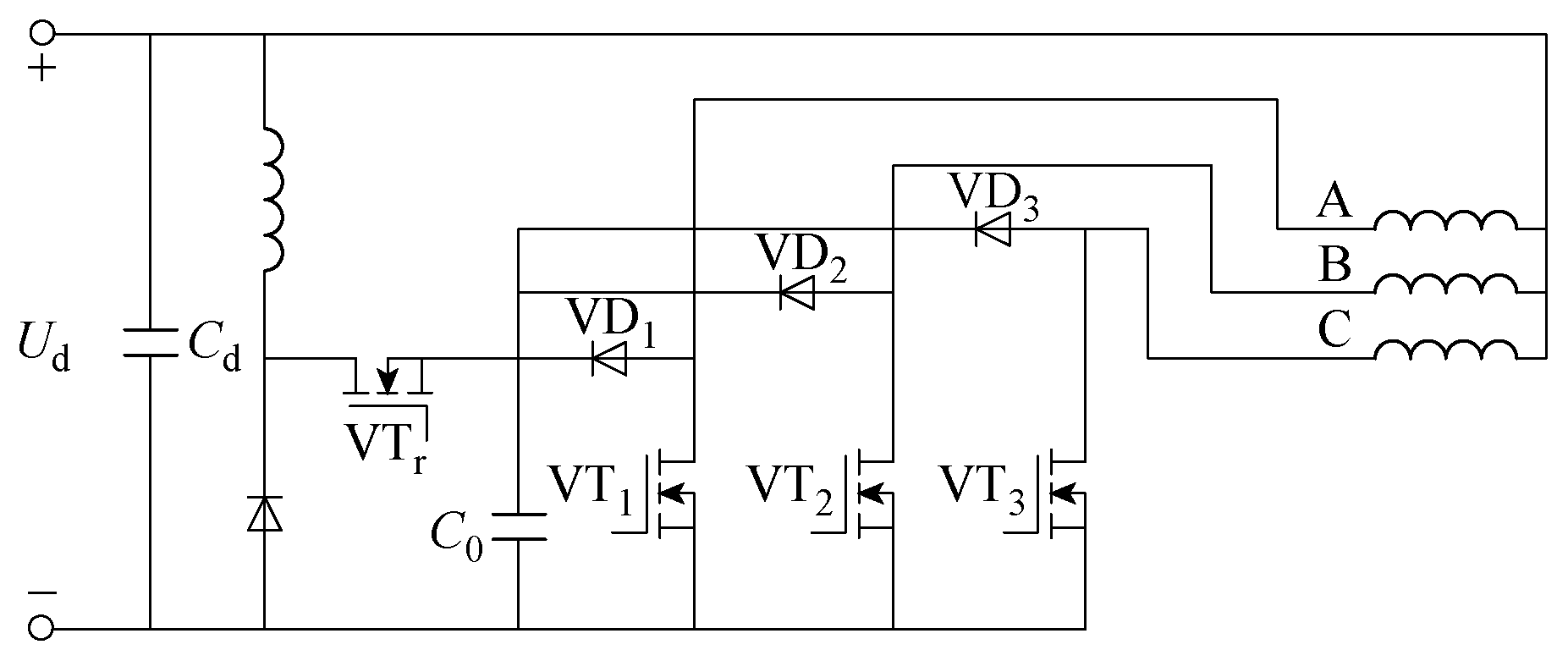
3)C-Dump式。一种介于半桥式控制和全桥式控制间的折衷控制方法。
4)H桥式。特点是每个绕组采用一个H桥独立控制,可灵活改变绕组电流的大小和方向,实现电机的四象限控制。为防止同相上、下桥功率器件同时导通造成直通短路,需要对驱动信号惊醒死区延时控制,死区时间要大于功率器件的关断时间。

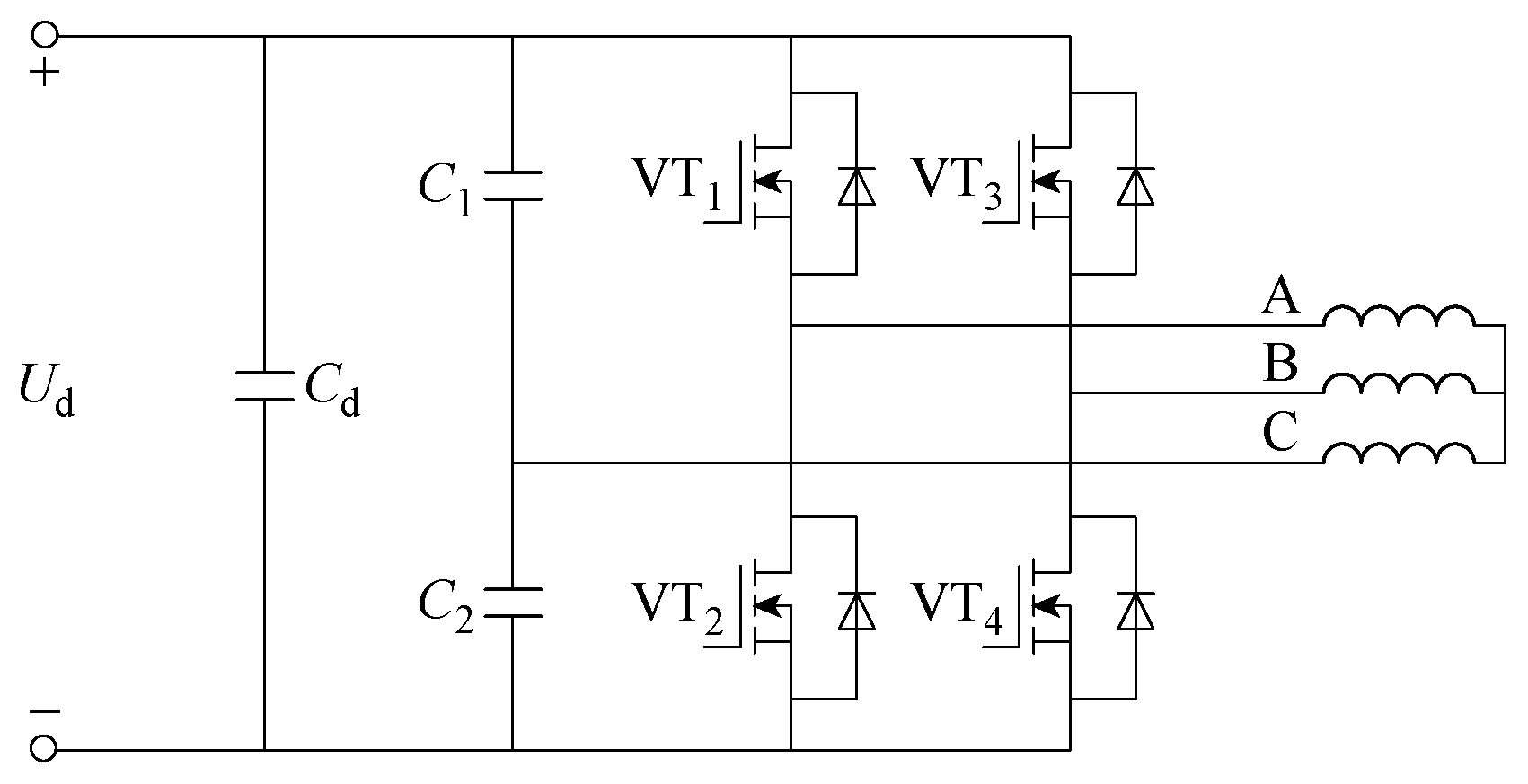
5)四开关式。图中四开关三箱拓扑结构由两个电容代替六开关三相逆变桥的一组桥路,电机C相绕组接在C1和C2之间,代替两个功率器件,节省成本,但增加控制复杂性。
 无刷直流电机转矩波动抑制根据产生机理,无刷直流电机转矩波动主要分为齿槽转矩波动和换相转矩波动。
无刷直流电机转矩波动抑制根据产生机理,无刷直流电机转矩波动主要分为齿槽转矩波动和换相转矩波动。
1)齿槽转矩波动抑制:齿槽转矩是由于定转子齿槽的存在,不同位置磁路的磁组存在差异,气隙磁场在空间分布上出现锯齿形波动,进而造成电机反电动势波形产生畸变,引起转矩波动。对电机结构合理优化可有效减小齿槽转矩,抑制齿槽转矩波动的方法有:斜槽/斜极法、磁性槽楔法、减小槽口宽度法、辅助槽/辅助齿法、分数槽法、变极弧宽度和变磁极位置法等。
2)换相转矩波动抑制:电机运行时,导通时间较长,决定了电机稳态电磁转矩的大小。换相暂态过程复杂,时间短暂,转速和负载越大,换相转矩波动越明显。采用同时开通导通相、关闭关断相的换相方法,只能一定程度上减小转矩波动。基于自抗扰控制技术的换相转矩波动抑制根据无刷直流电机特性及自抗扰控制器(ADRC)设计原则,将电机等效为由两个非线性系统构成的积分串联型对象,设计两个一阶自抗扰控制器,实现对电机的双闭环控制。

2.控制策略
控制策略主要包括:反电动势法、三次谐波法、反电势积分法、磁链估测法、续流二极管法、智能控制法等。
1)反电动势法:该方法将检测获得的反电动势过零点信号延迟30°电角度,得到6个离散的转子位置信号,为逻辑开关电路提供正确的换相信息,实现无刷直流电机的无位置传感器控制。
2)磁链法:通过直接估计磁链以获得转子的位置信息。由测量的电压、电流获得电机磁链。进而由估计得到的电机磁链判断出转子位置。
3)智能控制法:具有很强的自适应性和自学习能力,用人工神经网络、模糊策略、遗传算法和人工免疫自适应等理论建立电机的电压、电流与转子位置之间的关系。由测量到的电机电压、电流信号映射出转子位置信号或直接获得电机的准确数学模型,因此适用于非线性系统。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/128174.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
