大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全家桶1年46,售后保障稳定
matlab图像融合
[r,c]=size(y1); %根据低频融合算法进行图像融合
for i=1:r %首先取两幅源图像相应的小波分解系数绝对值最大者的值作为融合图像的分解系数
for j=1:c
if( abs(y1(i,j)) >= abs(y2(i,j)) )
y3(i,j)=y1(i,j);
elseif( abs(y1(i,j)) < abs(y2(i,j)) )
y3(i,j)=y2(i,j);
end
% y3(i,j)=max(abs(y1(i,j)) , abs(y2(i,j)) ); % 这行代码是错误的,取了绝对值而非实际值
end
end
(2)低频融合的对象
低频融合的对象是N级分解后图像的LL-N子图像,相应的程序代码为:
LLa=y1(1:r/(2^dim),1:c/(2^dim)); %调用lowfrefus函数对低频部分的小波分解系数进行融合
LLb=y2(1:r/(2^dim),1:c/(2^dim));
y3(1:r/(2^dim),1:c/(2^dim))=lowfrefus(LLa,LLb);
(3)低频融合策略的程序代码
这一部分程序代码的实现难度不大,根据算法原理中列出的公式可以很快写出相应的代码。不过有些细节问题还是要花心思处理,比如区域大小的确定、区域边界与图像边界的关系、区域中心与区域中各点的权值确定、区域中心在原始图像中的具体位置等等。
function y = lowfrefus(A,B);
% 函数 Y=LOWFREFUS(A,B) 对输入的两个小波分解系数矩阵,根据低频融合算法,得出融合图像的低频小波分解系数
[row,col]=size(A); %求出分解系数矩阵的行列数
alpha=0.5; %alpha是方差匹配度比较的阈值
for i=1:row %根据低频融合算法,先求出矩阵A,B中以点P为中心的区域方差和方差匹配度
forj=1:col % 再根据方差匹配度与阈值的比较确定融合图像的小波分解系数
[m2p(i,j),Ga(i,j),Gb(i,j)]= area_var_match(A,B,[i,j]);
Wmin=0.5-0.5*((1-m2p(i,j))/(1-alpha));
Wmax=1-Wmin;
ifm2p(i,j)<alpha % m2p表示方差匹配度
ifGa(i,j)>=Gb(i,j) % 若匹配度小于阈值,则取区域方差大的相应点的分解系数作为融合图像的分解系数
y(i,j)=A(i,j);
else
y(i,j)=B(i,j);
end
else %若匹配度大于阈值,则采取加权平均方法得出相应的分解系数
ifGa(i,j)>=Gb(i,j)
y(i,j)=Wmax*A(i,j)+Wmin*B(i,j);
else
y(i,j)=Wmin*A(i,j)+Wmax*B(i,j);
end
end
end
end
function w = weivec(x,p);
% 函数 W=WEIVEC(X,P) 对输入的r*c矩阵,计算出以点p为中心时矩阵各点的对应权值
% 距离点p越近,权值就越大。权值是通过行和列的高斯分布加权相加得到的。
[r,c]=size(x);
p1=p(1); p2=p(2);
sig=1;
for i=1:r
for j=1:c
w(i,j)=0.5*(gaussmf(i,[sigp1])+gaussmf(j,[sig p2]));
end
end
function [m2p,Ga,Gb] =area_var_match(A,B,p);
% 函数 area_var_match 计算两个输入矩阵以点p为中心的区域方差以及区域方差匹配度
level=1; % 设置区域的大小
[subA,mpa,npa]=submat(A,p,level); %submat 函数取输入矩阵中以点P为中心、阶数为(2*level+1)的方阵作为子矩阵
[subB,mpb,npb]=submat(B,p,level);
[r,c]=size(subA);
w=weivec(subA,[mpa npa]); %获取子矩阵的权值分布
averA=sum(sum(subA))/(r*c); % 计算子矩阵的平均值
averB=sum(sum(subB))/(r*c);
Ga=sum(sum(w.*(subA-averA).^2)); %计算子矩阵的区域方差
Gb=sum(sum(w.*(subB-averB).^2));
if(Ga==0)&(Gb==0) % 计算两个子矩阵的区域方差匹配度
m2p=0;
else
m2p=2*sum(sum(w.*abs(subA-averA).*abs(subB-averB)))/(Ga+Gb);
end
function [smat,mp,np] = submat(x,p,level);
% 函数 submat 取输入矩阵中以点P为中心、阶数为(2*level+1)的方阵作为输出的子矩阵
[row,col]=size(x);
m=p(1); n=p(2);
if (m>row)||(n>col)
error(‘Point p isout of matrix X !’);
return;
end
if((2*level+1)>row)||((2*level+1)>col)
error(‘Too largesample area level !’);
return;
end
% 设置子矩阵的边界值
up=m-level; down=m+level;
left=n-level; right=n+level;
% 若子矩阵的某一边界值超出输入矩阵的相应边界,就进行边界处理,
% 即超出边界后往相反方向平移,使其恰好与边界重合
if left<1
right=right+1-left;
left=1;
end
if right>col
left=left+col-right;
right=col;
end
if up<1
down=down+1-up;
up=1;
end
if down>row
up=up+row-down;
down=row;
end
% 获取作为输出的子矩阵,并计算点p在输出的子矩阵中的位置
smat = x(up:down,left:right);
mp=m-up+1;np=n-left+1;
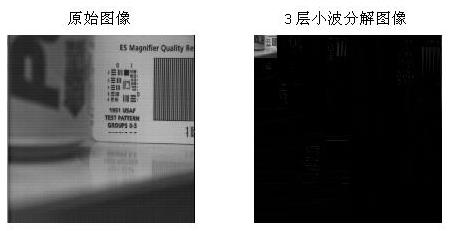
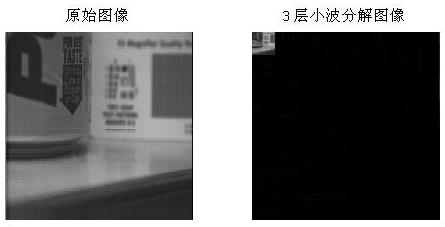
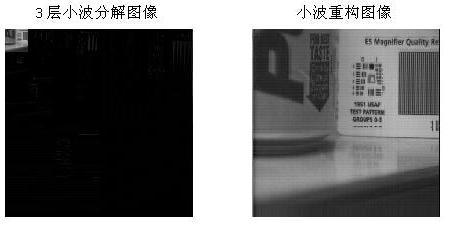
下面我们给出相应的图片示例,图1 是一幅远景清晰近景模糊的图片,图2 是一幅远景模糊近景清晰的图片,图3是融合效果图。

图像融合是将两幅或多幅图像融合在一起,以获取对同一场景的更为精确、更为全面、更为可靠的图像描述。融合算法应该充分利用各原图像的互补信息,使融合后的图像更适合人的视觉感受,适合进一步分析的需要;并且应该统一编码,压缩数据量,以便于传输。
图像融合可分为三个层次:
1. 像素级融合
2. 特征级融合
3. 决策级融合
其中像素级融合是最低层次的融合,也是后两级的基础。它是将各原图像中对应的像素进行融合处理,保留了尽可能多的图像信息,精度比较高, 因而倍受人们的重视。像素级的图像融合方法大致可分为三大类:
1. 简单的图像融合方法
2. 基于塔形分解(如Laplace塔形分解、比率塔等)的图像融合方法
3. 基于小波变换的图像融合方法
小波变换是图像的多尺度、多分辨率分解,它可以聚焦到图像的任意细节,被称为数学上的显微镜。近年来,随着小波理论及其应用的发展,已将小波多分辨率分解用于像素级图像融合。小波变换的固有特性使其在图像处理中有如下优点:
1. 完善的重构能力,保证信号在分解过程中没有信息损失和冗余信息;
2. 把图像分解成平均图像和细节图像的组合,分别代表了图像的不同结构,因此容易提取原始图像的结构信息和细节信息;
3. 具有快速算法,它在小波变换中的作用相当于FFT算法在傅立叶变换中的作用,为小波变换应用提供了必要的手段;
4. 二维小波分析提供了与人类视觉系统方向相吻合的选择性图像。
——像素级图像融合的主要步骤
以两幅图像的融合为例。设A,B为两幅原始图像,F为融合后的图像。若对二维图像进行N层的小波分解,最终将有(3N+1)个不同频带,其中包含3N 个高频子图像和1个低频子图像。其融合处理的基本步骤如下:
(1)对每一原图像分别进行小波变换,建立图像的小波塔型分解;
(2)对各分解层分别进行融合处理。各分解层上的不同频率分量可采用不同的融合算子进行融合处理,最终得到融合后的小波金字塔;
(3)对融合后所得小波金字塔进行小波重构,所得到的重构图像即为融合图像。
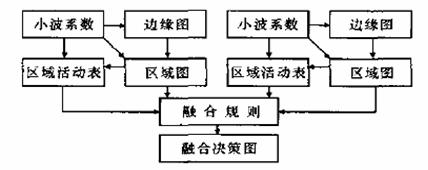
图 1
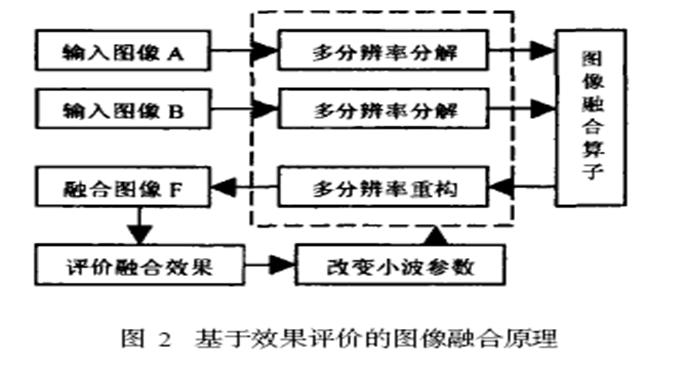
在图像融合过程中,小波基的种类和小波分解的层数对融合效果有很大的影响,对特定的图像来说,哪一种小波基的融合效果最好,分解到哪一层最合适,都是需要考虑的问题。为此可以通过引入融合效果的评价来构成一个闭环系统。如图2所示。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/230833.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
