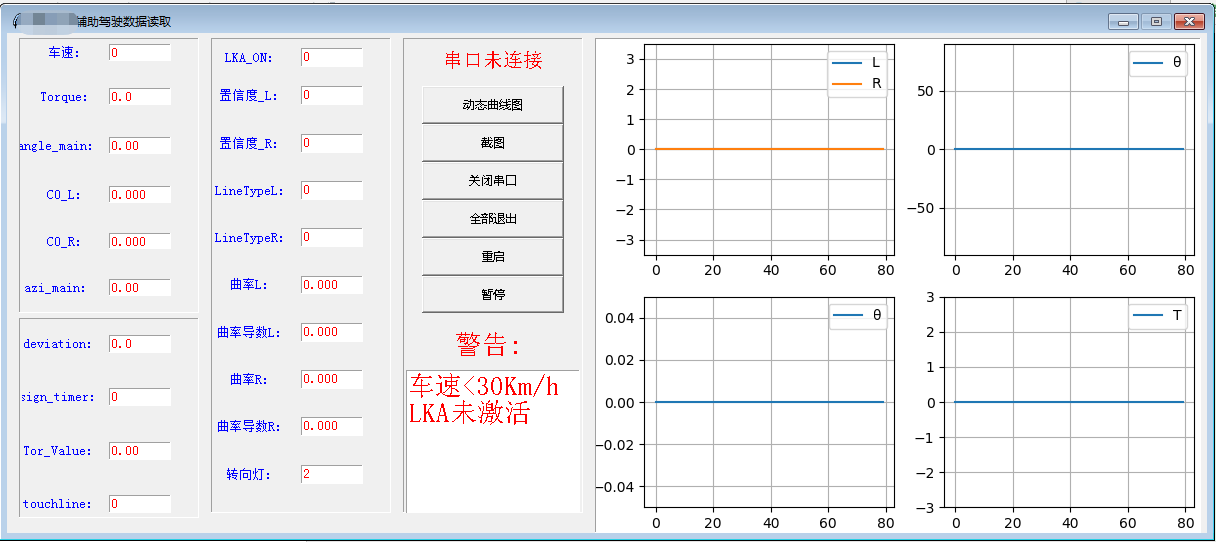
串口数据读取和动态显示Tkinter+matplotlib+pyqtgraph(详细教程)
注意 :本函数已将pyqtgraph动态绘图隐藏,在main函数中去除隐藏便可以显示,但是没有嵌入到tkinter
运行环境:
win10,python3.5.2
效果图:

代码:
# import os
# import sys
# import serial
# from tkinter import *
from tkinter.simpledialog import *
import tkinter.messagebox
import serial.tools.list_ports
import matplotlib.pyplot as plt
import matplotlib.animation as animation
import numpy as np
import datetime
#import time
import threading
# import sys
# import array
# import pyqtgraph as pg
import os
# 创建画布需要的库
from matplotlib.backends.backend_tkagg import FigureCanvasTkAgg
# 创建工具栏需要的库
# from matplotlib.backends.backend_tkagg import NavigationToolbar2Tk
import shutil
jishu1 = 0 # type: int
#接收不到数据,循环10次之后退出
exit_sum = 0
#使用matplotlib模块绘图,可以嵌入到tkinter,但是性能不好
dis = np.zeros(80) #左车道线距离
dis2 = dis
dis3 = np.zeros(80) #右车道线距离
dis4 = dis3
dis5 = np.zeros(80) #方向盘转角
dis6 = dis5
dis7 = np.zeros(80) #方位角
dis8 = dis7
dis9 = np.zeros(80) #发送扭矩大小
dis10 = dis9
#截图命名
name_sum = 0
#pyqtgraph模块绘图,不能嵌入到tkinter,但是性能较好
i = 0
gg = 0
zxd = 0
data = []
shuju = []
shuju2 = []
shuju3 = []
shuju4 = []
shuju5 = []
historyLength = 0
historyLength2 = 0
def recv(): # 从串口获取数据
# start1 = time.time()
global exit_sum
try:
data3 = serial1.readline()
data_str = str(data3)
if data_str.count(',') != 19:
data3 = b'0,0,0,0.0,0.00,0.000,0.000,0.00,0.0,0,0.00,0,0,0.000,0.000,0.000,0.000,0,0,1\n'
jishu1 = 1
exit_sum = exit_sum + 1
elif data_str.count(',') == 19:
jishu1 = 0
exit_sum = 0
# end1 = time.time()
# print(end1 - start1)
except:
data3 = b'0,0,0,0.0,0.00,0.000,0.000,0.00,0.0,0,0.00,0,0,0.000,0.000,0.000,0.000,0,0,2\n'
return data3
#主要数据处理
def lka_all():
# while 1:
global jishu1
global lka_cs_in, lka_sign_timer_in, lka_on_in, torque_in, angle_main_in, c0_l_in, c0_r_in, azi_main_in, deviation_reminder, \
touchline_sign, Tor_Value, c0_l_lctype, c0_r_rtype, c2_l, c3_l, c2_r, c3_r, degree_confidence_l, degree_confidence_r, zxd
global exit_sum
try:
data1 = recv() # 将数据进行解析
except:
data1 = b'0,0,0,0.0,0.00,0.000,0.000,0.00,0.0,0,0.00,0,0,0.000,0.000,0.000,0.000,0,0,3\n'
if exit_sum > 1000: #接收不到数据,循环10次之后退出
exit_all()
if data1 != b'':
lka_cs_in = data1.split(str.encode(','))[0] # 车速信息
text_cs.delete('1.0', 'end')
text_cs.insert(END, lka_cs_in)
lka_sign_timer_in = data1.split(str.encode(','))[1] # 程序执行到那一步的标志位.
text_sign_timer.delete('1.0', 'end')
text_sign_timer.insert(END, lka_sign_timer_in)
lka_on_in = data1.split(str.encode(','))[2] # LKA的总开关是否开启
text_lka_on_in.delete('1.0', 'end')
text_lka_on_in.insert(END, lka_on_in)
torque_in = data1.split(str.encode(','))[3] # 方向盘的扭矩,驾驶员驾驶的扭矩
text_torque_in.delete('1.0', 'end')
text_torque_in.insert(END, torque_in)
angle_main_in = data1.split(str.encode(','))[4] # 方向盘的转角
text_angle_main_in.delete('1.0', 'end')
text_angle_main_in.insert(END, angle_main_in)
c0_l_in = data1.split(str.encode(','))[5] # 距离左边线的距离
text_c0_l_in.delete('1.0', 'end')
text_c0_l_in.insert(END, c0_l_in)
c0_r_in = data1.split(str.encode(','))[6] # 距离右边线的距离
text_c0_r_in.delete('1.0', 'end')
text_c0_r_in.insert(END, c0_r_in)
azi_main_in = data1.split(str.encode(','))[7] # 车身的方位角
text_azi_main_in.delete('1.0', 'end')
text_azi_main_in.insert(END, azi_main_in)
deviation_reminder = data1.split(str.encode(','))[8] # 是否满足偏离条件,左偏为1,右偏为-1
text_deviation_reminder.delete('1.0', 'end')
text_deviation_reminder.insert(END, deviation_reminder)
# print(deviation_reminder)
# print(type(deviation_reminder))
touchline_sign = data1.split(str.encode(','))[9] # 是否压线
text_touchline_sign.delete('1.0', 'end')
text_touchline_sign.insert(END, touchline_sign)
# print(touchline_sign)
Tor_Value = data1.split(str.encode(','))[10] # 发送的扭矩值
text_Tor_Value.delete('1.0', 'end')
text_Tor_Value.insert(END, Tor_Value)
c0_l_lctype = data1.split(str.encode(','))[11] # 左车道线类型
text_c0_lctype.delete('1.0', 'end')
text_c0_lctype.insert(END, c0_l_lctype)
c0_r_rtype = data1.split(str.encode(','))[12] # 右车道线类型
text_c0_rtype.delete('1.0', 'end')
text_c0_rtype.insert(END, c0_r_rtype)
c2_l = data1.split(str.encode(','))[13] # zuo曲率
text_c2_l.delete('1.0', 'end')
text_c2_l.insert(END, c2_l)
c3_l = data1.split(str.encode(','))[14] # 左曲率导数
text_c3_l.delete('1.0', 'end')
text_c3_l.insert(END, c3_l)
c2_r = data1.split(str.encode(','))[15] # 右曲率
text_c2_r.delete('1.0', 'end')
text_c2_r.insert(END, c2_r)
c3_r = data1.split(str.encode(','))[16] # 右曲率倒数
text_c3_r.delete('1.0', 'end')
text_c3_r.insert(END, c3_r)
degree_confidence_l = data1.split(str.encode(','))[17] # 左置信度
text_degree_confidence_l.delete('1.0', 'end')
text_degree_confidence_l.insert(END, degree_confidence_l)
degree_confidence_r = data1.split(str.encode(','))[18] # 右置信度
text_degree_confidence_r.delete('1.0', 'end')
text_degree_confidence_r.insert(END, degree_confidence_r)
zxd = data1.split(str.encode(','))[19] # 右置信度
text_zxd.delete('1.0', 'end')
text_zxd.insert(END, zxd)
if int(lka_cs_in) >= 30:
if int(degree_confidence_r) < 2 or int(degree_confidence_l) < 2:
text_alert.delete('1.0', 'end')
text_alert.insert(END, '置信度较低\n不能识别车道线')
elif deviation_reminder == b'1.0' and jishu1 == 0:
text_alert.delete('1.0', 'end')
text_alert.insert(END, '左偏离')
if touchline_sign == b'1':
text_alert.delete('1.0', 'end')
text_alert.insert(END, '左偏离+压线\n正在退出纠正...')
elif deviation_reminder == b'-1.0' and jishu1 == 0:
text_alert.delete('1.0', 'end')
text_alert.insert(END, '右偏离')
if touchline_sign == b'1':
text_alert.delete('1.0', 'end')
text_alert.insert(END, '右偏离+压线\n正在退出纠正...')
elif touchline_sign == b'1':
text_alert.delete('1.0', 'end')
text_alert.insert(END, '压线\n正在退出纠正...')
elif jishu1 == 1:
text_alert.delete('1.0', 'end')
text_alert.insert(END, '数据错误')
elif int(zxd == 1):
text_alert.delete('1.0', 'end')
text_alert.insert(END, '已开启转向灯\nLKA未激活')
else:
text_alert.delete('1.0', 'end')
elif int(lka_cs_in) < 30:
text_alert.delete('1.0', 'end')
text_alert.insert(END, '车速<30Km/h\nLKA未激活')
# try:
# serial1.close()
# except:
# print("close_error")
def update(goo):
# start1 = time.clock()
global lka_cs_in, lka_sign_timer_in, lka_on_in, torque_in, angle_main_in, c0_l_in, c0_r_in, azi_main_in, deviation_reminder, \
touchline_sign, Tor_Value, c0_l_lctype, c0_r_rtype, c2_l, c3_l, c2_r, c3_r, degree_confidence_l, degree_confidence_r, zxd
global dis, dis2, dis3, dis4, dis5, dis6, dis7, dis8, dis9, dis10, line, line1, line2, line3, line4
global aa, bb, cc, dd, ee
# 读入模拟
try:
aa = c0_l_in
bb = c0_r_in
cc = angle_main_in
dd = azi_main_in
except:
aa = 0
bb = 0
cc = 0
dd = 0
try:
ee = Tor_Value
except:
ee = 0
# 左车道线距离
dis[0:-1] = dis2[1:]
dis[-1] = aa
dis2 = dis
# 右车道线距离
dis3[0:-1] = dis4[1:]
dis3[-1] = bb
dis4 = dis3
# 方向盘转角
dis5[0:-1] = dis6[1:]
dis5[-1] = cc
dis6 = dis5
# 方位角
dis7[0:-1] = dis8[1:]
dis7[-1] = dd
dis8 = dis7
# 发送扭矩
dis9[0:-1] = dis10[1:]
dis9[-1] = ee
dis10 = dis9
line.set_ydata(dis)
line1.set_ydata(dis3)
line2.set_ydata(dis5)
line3.set_ydata(dis7)
line4.set_ydata(dis9)
# end1 = time.clock()
# print(end1 - start1)
def display():
# start1 = time.clock()
global dis, dis2, dis3, dis4, dis5, dis6, dis7, dis8, dis9, dis10, line, line1, line2, line3, line4
fig = plt.figure(figsize=(10,8))
plt.subplots_adjust(left=0.08, right=0.99, top=0.99, bottom=0.05)
ax = fig.add_subplot(2, 2, 1, ylim=(-3.5, 3.5))
plt.grid()
# ax.set_ylabel("distance")
line, = ax.plot(dis)
line1, = ax.plot(dis3)
plt.legend('LRdistance')
# 设置坐标轴刻度
# my_y_ticks1 = np.arange(-4, 4, 1)
# plt.yticks(my_y_ticks1)
ax2 = fig.add_subplot(2, 2, 2, ylim=(-90, 90))
plt.grid()
# ax2.set_ylabel("angle")
line2, = ax2.plot(dis5)
plt.legend('θangle')
# 设置坐标轴刻度
# my_y_ticks2 = np.arange(-100, 100, 15)
# plt.yticks(my_y_ticks2)
ax3 = fig.add_subplot(2, 2, 3, ylim=(-0.05, 0.05))
plt.grid()
# ax3.set_ylabel("azi")
line3, = ax3.plot(dis7)
plt.legend('θazi')
# # 设置坐标轴刻度
# my_y_ticks3 = np.arange(-0.2, 0.2, 0.05)
# plt.yticks(my_y_ticks3)
ax4 = fig.add_subplot(2, 2, 4, ylim=(-3, 3))
plt.grid()
# ax4.set_ylabel("T_send")
line4, = ax4.plot(dis9)
plt.legend('T_send')
# # 设置坐标轴刻度
# my_y_ticks4 = np.arange(-3, 3, 0.5)
# plt.yticks(my_y_ticks4)
# 创建画布控件
canvas = FigureCanvasTkAgg(fig, master=frame5)
canvas.draw()
# 显示画布控件
canvas.get_tk_widget().pack()
ani = animation.FuncAnimation(fig, update, frames=None, interval=40) # default=200
# end1 = time.clock()
# print(end1 - start1)
plt.show()
def pause_ani():
tkinter.messagebox.showinfo('提示', '暂时没有该功能')
def screen_shot():
# #查询是否重复
# global name_sum
# ss = askstring('Input','Input filename')
# shotname = ss + str(name_sum) + '.png'
# if os.path.exists(shotname):
# tkinter.messagebox.showinfo('提示', '命名重复,再来一次吧')
# else:
# plt.savefig(shotname)
# name_sum = name_sum + 1
name_dir = str(datetime.datetime.now()).split(' ')[0]
shotname_tmp = str(str(datetime.datetime.now()) + '.png')
shotname = shotname_tmp.replace(':','-')
plt.savefig(shotname)
if os.path.exists('数据曲线截图'):
pass
else:
os.mkdir('数据曲线截图')
try:
if os.path.exists(shotname):
shutil.move(shotname, '数据曲线截图')
else:
tkinter.messagebox.showinfo('提示', '图片不存在')
except:
tkinter.messagebox.showinfo('提示', '未知错误')
# 重启程序
def restart_program():
global data1, serial1, com_0, com_kou
try:
serial1.close()
except:
pass
# tkinter.messagebox.showinfo('提示', '暂时没有该功能')
port_list22 = list(serial.tools.list_ports.comports())
if len(port_list22) == 0:
pass
else:
com_0 = str(port_list22[1])
com_kou = com_0.split(' ')[1]
try:
serial1 = serial.Serial(com_kou, 115200, timeout=0.15) # com_kou
data1 = recv() # 将数据进行解析
lb1 = Label(frame4, text='串口已连接', fg='blue', font=('宋体', 15))
lb1.place(relx=0.1, rely=0.02, relwidth=0.8, relheight=0.05)
except:
data1 = b'000,000,000,000,000,000,000,000,000,000,000,000,000,000,000,000,000,000,000,000\n'
if serial1.isOpen():
lb1 = Label(frame4, text='串口已连接', fg='blue', font=('宋体', 15))
lb1.place(relx=0.1, rely=0.02, relwidth=0.8, relheight=0.05)
else:
lb1 = Label(frame4, text='串口未连接', fg='blue', font=('宋体', 15))
lb1.place(relx=0.1, rely=0.02, relwidth=0.8, relheight=0.05)
# 退出命令
def exit_all():
# root.quit()
# root.destroy()
# os._exit(0)
# sys.exit(app.exec_())
# # sys.exit(1)
os._exit(0)
def close_com():
global serial1
serial1.close()
print('串口关闭了')
def plotData():
global gg
global lka_cs_in, c0_l_in, c0_r_in, angle_main_in, azi_main_in, Tor_Value, deviation_reminder
global idx # 内部作用域想改变外部域变量
global historyLength
global historyLength2
gg = gg + 0.01
try:
tmp = float(c0_l_in)
tmp2 = float(c0_r_in)
tmp3 = float(angle_main_in)
tmp4 = float(azi_main_in)
except:
tmp = 0
tmp2 = 0
tmp3 = 0
tmp4 = 0
try:
tmp5 = float(Tor_Value)
except:
tmp5 = 0
try:
tmp6 = float(deviation_reminder)
except:
tmp6 = 0
if len(data) <= historyLength:
data.append(tmp)
shuju.append(tmp2)
shuju2.append(tmp3)
shuju3.append(tmp4)
shuju4.append(tmp5)
shuju5.append(tmp6)
else:
data[:-1] = data[1:] # 前移
data[-1] = tmp
shuju[:-1] = shuju[1:] # 前移
shuju[-1] = tmp2
shuju2[:-1] = shuju2[1:] # 前移
shuju2[-1] = tmp3
shuju3[:-1] = shuju3[1:] # 前移
shuju3[-1] = tmp4
shuju4[:-1] = shuju4[1:] # 前移
shuju4[-1] = tmp5
shuju5[:-1] = shuju5[1:] # 前移
shuju5[-1] = tmp6
curve1.setData(data)
curve2.setData(shuju)
curve3.setData(shuju2)
curve4.setData(shuju3)
curve5.setData(shuju4)
curve6.setData(shuju5)
idx += 1
if __name__ == '__main__':
root = Tk()
root.geometry('1200x500')
root.resizable(False, False)
root.title('毕业设计 LKA辅助驾驶数据读取')
frame1 = Frame(root, relief=SUNKEN, bd=1)
frame1.place(relx=0.01, rely=0.01, relwidth=0.15, relheight=0.55)
frame2 = Frame(root, relief=SUNKEN, bd=1)
frame2.place(relx=0.01, rely=0.57, relwidth=0.15, relheight=0.4)
frame3 = Frame(root, relief=SUNKEN, bd=1)
frame3.place(relx=0.17, rely=0.01, relwidth=0.15, relheight=0.95)
frame4 = Frame(root, relief=SUNKEN, bd=1)
frame4.place(relx=0.33, rely=0.01, relwidth=0.15, relheight=0.95)
frame5 = Frame(root, relief=SUNKEN, bd=1)
frame5.place(relx=0.49, rely=0.01, relwidth=0.505, relheight=0.99)
# Tk控件的名称
text_cs = Text(frame1, fg='red', font=("宋体", 10))
lb_cs = Label(frame1, text='车速:', fg='blue', font=("宋体", 10))
text_torque_in = Text(frame1, fg='red', font=("宋体", 10))
lb_torque = Label(frame1, text='Torque:', fg='blue', font=("宋体", 10))
text_angle_main_in = Text(frame1, fg='red', font=("宋体", 10))
lb_angle_main = Label(frame1, text='angle_main:', fg='blue', font=("宋体", 10))
text_c0_l_in = Text(frame1, fg='red', font=("宋体", 10))
lb_c0_l = Label(frame1, text='C0_L:', fg='blue', font=("宋体", 10))
text_c0_r_in = Text(frame1, fg='red', font=("宋体", 10))
lb_c0_r = Label(frame1, text='C0_R:', fg='blue', font=("宋体", 10))
text_azi_main_in = Text(frame1, fg='red', font=("宋体", 10))
lb_azi_main = Label(frame1, text='azi_main:', fg='blue', font=("宋体", 10))
text_deviation_reminder = Text(frame2, fg='red', font=("宋体", 10))
lb_deviation_reminder = Label(frame2, text='deviation:', fg='blue', font=("宋体", 10))
text_sign_timer = Text(frame2, fg='red', font=("宋体", 10))
lb_sign = Label(frame2, text='sign_timer:', fg='blue', font=("宋体", 10))
text_touchline_sign = Text(frame2, fg='red', font=("宋体", 10))
lb_touchline_sign = Label(frame2, text='touchline:', fg='blue', font=("宋体", 10))
text_Tor_Value = Text(frame2, fg='red', font=("宋体", 10))
lb_text_Tor_Value = Label(frame2, text='Tor_Value:', fg='blue', font=("宋体", 10))
text_lka_on_in = Text(frame3, fg='red', font=("宋体", 10))
lb_lka_on = Label(frame3, text='LKA_ON:', fg='blue', font=("宋体", 10))
text_degree_confidence_l = Text(frame3, fg='red', font=("宋体", 10))
lb_text_degree_confidence_l = Label(frame3, text='置信度_L:', fg='blue', font=("宋体", 10))
text_degree_confidence_r = Text(frame3, fg='red', font=("宋体", 10))
lb_text_degree_confidence_r = Label(frame3, text='置信度_R:', fg='blue', font=("宋体", 10))
text_c0_lctype = Text(frame3, fg='red', font=("宋体", 10))
lb_text_c0_lctype = Label(frame3, text='LineTypeL:', fg='blue', font=("宋体", 10))
text_c0_rtype = Text(frame3, fg='red', font=("宋体", 10))
lb_text_c0_rtype = Label(frame3, text='LineTypeR:', fg='blue', font=("宋体", 10))
text_c2_l = Text(frame3, fg='red', font=("宋体", 10))
lb_text_c2_l = Label(frame3, text='曲率L:', fg='blue', font=("宋体", 10))
text_c3_l = Text(frame3, fg='red', font=("宋体", 10))
lb_text_c3_l = Label(frame3, text='曲率导数L:', fg='blue', font=("宋体", 10))
text_c2_r = Text(frame3, fg='red', font=("宋体", 10))
lb_text_c2_r = Label(frame3, text='曲率R:', fg='blue', font=("宋体", 10))
text_c3_r = Text(frame3, fg='red', font=("宋体", 10))
lb_text_c3_r = Label(frame3, text='曲率导数R:', fg='blue', font=("宋体", 10))
text_zxd = Text(frame3, fg='red', font=("宋体", 10))
lb_text_zxd = Label(frame3, text='转向灯:', fg='blue', font=("宋体", 10))
text_alert = Text(frame4, fg='red', font=("宋体", 20))
lb_text_alert = Label(frame4, text='警告:', fg='red', font=("宋体", 20))
# 界面显示相对于frame1的位置
text_cs.place(relx=0.5, rely=0.02, relwidth=0.35, relheight=0.06)
lb_cs.place(relx=0.1, rely=0.02, relwidth=0.3, relheight=0.06)
text_torque_in.place(relx=0.5, rely=0.18, relwidth=0.35, relheight=0.06)
lb_torque.place(relx=0.1, rely=0.18, relwidth=0.3, relheight=0.06)
text_angle_main_in.place(relx=0.5, rely=0.36, relwidth=0.35, relheight=0.06)
lb_angle_main.place(relx=0.0, rely=0.36, relwidth=0.4, relheight=0.06)
text_c0_l_in.place(relx=0.5, rely=0.54, relwidth=0.35, relheight=0.06)
lb_c0_l.place(relx=0.1, rely=0.54, relwidth=0.3, relheight=0.06)
text_c0_r_in.place(relx=0.5, rely=0.71, relwidth=0.35, relheight=0.06)
lb_c0_r.place(relx=0.1, rely=0.71, relwidth=0.3, relheight=0.06)
text_azi_main_in.place(relx=0.5, rely=0.88, relwidth=0.35, relheight=0.06)
lb_azi_main.place(relx=0.0, rely=0.88, relwidth=0.4, relheight=0.06)
# 界面显示相对于frame2的位置
text_deviation_reminder.place(relx=0.5, rely=0.08, relwidth=0.35, relheight=0.09)
lb_deviation_reminder.place(relx=0.01, rely=0.08, relwidth=0.4, relheight=0.09)
text_sign_timer.place(relx=0.5, rely=0.35, relwidth=0.35, relheight=0.09)
lb_sign.place(relx=0.01, rely=0.35, relwidth=0.4, relheight=0.09)
text_Tor_Value.place(relx=0.5, rely=0.62, relwidth=0.35, relheight=0.09)
lb_text_Tor_Value.place(relx=0.01, rely=0.62, relwidth=0.4, relheight=0.09)
text_touchline_sign.place(relx=0.5, rely=0.89, relwidth=0.35, relheight=0.09)
lb_touchline_sign.place(relx=0.01, rely=0.89, relwidth=0.4, relheight=0.09)
# 界面显示相对于frame3的位置
text_lka_on_in.place(relx=0.5, rely=0.02, relwidth=0.35, relheight=0.04)
lb_lka_on.place(relx=0.01, rely=0.02, relwidth=0.4, relheight=0.04)
text_degree_confidence_l.place(relx=0.5, rely=0.1, relwidth=0.35, relheight=0.04)
lb_text_degree_confidence_l.place(relx=0.01, rely=0.1, relwidth=0.4, relheight=0.04)
text_degree_confidence_r.place(relx=0.5, rely=0.2, relwidth=0.35, relheight=0.04)
lb_text_degree_confidence_r.place(relx=0.01, rely=0.2, relwidth=0.4, relheight=0.04)
text_c0_lctype.place(relx=0.5, rely=0.3, relwidth=0.35, relheight=0.04)
lb_text_c0_lctype.place(relx=0.01, rely=0.3, relwidth=0.4, relheight=0.04)
text_c0_rtype.place(relx=0.5, rely=0.4, relwidth=0.35, relheight=0.04)
lb_text_c0_rtype.place(relx=0.01, rely=0.4, relwidth=0.4, relheight=0.04)
text_c2_l.place(relx=0.5, rely=0.5, relwidth=0.35, relheight=0.04)
lb_text_c2_l.place(relx=0.01, rely=0.5, relwidth=0.4, relheight=0.04)
text_c3_l.place(relx=0.5, rely=0.6, relwidth=0.35, relheight=0.04)
lb_text_c3_l.place(relx=0.01, rely=0.6, relwidth=0.4, relheight=0.04)
text_c2_r.place(relx=0.5, rely=0.7, relwidth=0.35, relheight=0.04)
lb_text_c2_r.place(relx=0.01, rely=0.7, relwidth=0.4, relheight=0.04)
text_c3_r.place(relx=0.5, rely=0.8, relwidth=0.35, relheight=0.04)
lb_text_c3_r.place(relx=0.01, rely=0.8, relwidth=0.4, relheight=0.04)
text_zxd.place(relx=0.5, rely=0.9, relwidth=0.35, relheight=0.04)
lb_text_zxd.place(relx=0.01, rely=0.9, relwidth=0.4, relheight=0.04)
# 界面显示相对于root的位置
text_alert.place(relx=0.01, rely=0.7, relwidth=0.98, relheight=0.35)
lb_text_alert.place(relx=0.13, rely=0.62, relwidth=0.7, relheight=0.05)
port_list = list(serial.tools.list_ports.comports())
if len(port_list) == 0:
print('找不到串口')
else:
com_0 = str(port_list[0])
com_kou = com_0.split(' ')[0]
try:
serial1 = serial.Serial(com_kou, 115200, timeout=0.15) # com_kou
data1 = recv() # 将数据进行解析
lb1 = Label(frame4, text='串口已连接', fg='blue', font=('宋体', 15))
lb1.place(relx=0.1, rely=0.02, relwidth=0.8, relheight=0.05)
except:
data1 = b'555,555,555,555,555,555,555,555,555,555,555,555,555,555,555,555,555,555,555,555\n'
lb1 = Label(frame4, text='串口未连接', fg='red', font=('宋体', 15))
lb1.place(relx=0.1, rely=0.02, relwidth=0.8, relheight=0.05)
btn2 = Button(frame4, text='动态曲线图', command=display)
btn2.place(relx=0.1, rely=0.1, relwidth=0.8, relheight=0.08)
btn3 = Button(frame4, text='截图', command=screen_shot)
btn3.place(relx=0.1, rely=0.18, relwidth=0.8, relheight=0.08)
btn4 = Button(frame4, text="关闭串口", command=close_com)
btn4.place(relx=0.1, rely=0.26, relwidth=0.8, relheight=0.08)
btn5 = Button(frame4, text="全部退出", command=exit_all)
btn5.place(relx=0.1, rely=0.34, relwidth=0.8, relheight=0.08)
btn6 = Button(frame4, text="重启", command=restart_program)
btn6.place(relx=0.1, rely=0.42, relwidth=0.8, relheight=0.08)
btn7 = Button(frame4, text="暂停", command=pause_ani)
btn7.place(relx=0.1, rely=0.50, relwidth=0.8, relheight=0.08)
#使用pyqt显示曲线图
# app = pg.mkQApp() # 建立app
# win = pg.GraphicsWindow() # 建立窗口
# win.setWindowTitle(u'实时监测卡车参数')
# win.resize(800, 400) # 小窗口大小
#
# data = array.array('d') # 可动态改变数组的大小,double型数组
# shuju = array.array('d') # 可动态改变数组的大小,double型数组
# historyLength = 100 # 横坐标长度
# p = win.addPlot() # 把图p加入到窗口中
# p.showGrid(x=True, y=True) # 把X和Y的表格打开
# # p.setRange(xRange=[0, historyLength], yRange=[-4.0, 4.0], padding=0)
# p.setLabel(axis='left', text='左右车道线距离') # 靠左
# p.setLabel(axis='bottom', text='time')
# p.setTitle('车道线距离') # 表格的名字
# curve1 = p.plot(pen='w') # 绘制一个图形
# curve2 = p.plot(pen='g') # 绘制一个图形
# angle_steer = win.addPlot(left='方向盘转角', bottom='time',title='方向盘转角')
# # angle_steer.setRange(xRange=[0, historyLength], yRange=[-600, 600], padding=0)
# curve3 = angle_steer.plot(pen='w')
# win.nextRow()
# azi = win.addPlot(left='方位角', bottom='time', title='方位角')
# azi.setRange(xRange=[0, historyLength], yRange=[-0.2, 0.2], padding=0)
# curve4 = azi.plot(pen='w')
# T_send = win.addPlot(left='发送扭矩', bottom='time', title='发送扭矩')
# T_send.setRange(xRange=[0, historyLength], yRange=[-2, 2], padding=0)
# curve5 = T_send.plot(pen='r')
# curve6 = T_send.plot(pen='g')
#
# idx = 0
# timer = pg.QtCore.QTimer()
# timer.timeout.connect(plotData) # 定时调用plotData函数
# timer.start(20) # 多少ms调用一次
thread_1 = threading.Thread(target=lka_all)
thread_1.start() # 开启T1
#使用pyqt显示曲线图
# thread_2 = threading.Thread(target=plotData)
# thread_2.start() # 开启T2
thread_3 = threading.Thread(target=recv)
thread_3.start() # 开启T1
root.mainloop()
# app.exec_()
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/2174.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
