Anchor 锚点概念
特征图上一点在原图中的对应点称为anchor。
以锚点为中心的9种不同大小和纵横比的矩形框称为anchor的点框
Epoch, Batch, Iteration概念


Epoch(时期):
当一个完整的数据集通过了神经网络一次并且返回了一次,这个过程称为一次>epoch。(也就是说,所有训练样本在神经网络中都 进行了一次正向传播 和一次反向传播 )
再通俗一点,一个Epoch就是将所有训练样本训练一次的过程。
然而,当一个Epoch的样本(也就是所有的训练样本)数量可能太过庞大(对于计算机而言),就需要把它分成多个小块,也就是就是分成多个Batch 来进行训练。**
Batch(批 / 一批样本):
将整个训练样本分成若干个Batch。
Batch_Size(批大小):
每批样本的大小。
Iteration(一次迭代):
训练一个Batch就是一次Iteration(这个概念跟程序语言中的迭代器相似)。
为什么要使用多于一个epoch?
在神经网络中传递完整的数据集一次是不够的,而且我们需要将完整的数据集在同样的神经网络中传递多次。但请记住,我们使用的是有限的数据集,并且我们使用一个迭代过程即梯度下降来优化学习过程。如下图所示。因此仅仅更新一次或者说使用一个epoch是不够的。
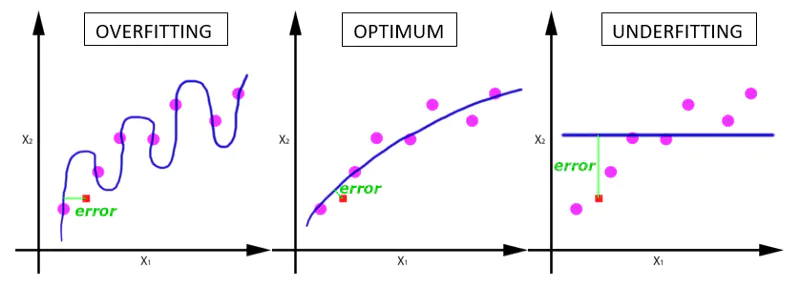
随着epoch数量增加,神经网络中的权重的更新次数也在增加,曲线从欠拟合变得过拟合。
那么,问题来了,几个epoch才是合适的呢?
不幸的是,这个问题并没有正确的答案。对于不同的数据集,答案是不一样的。但是数据的多样性会影响合适的epoch的数量。比如,只有黑色的猫的数据集,以及有各种颜色的猫的数据集。
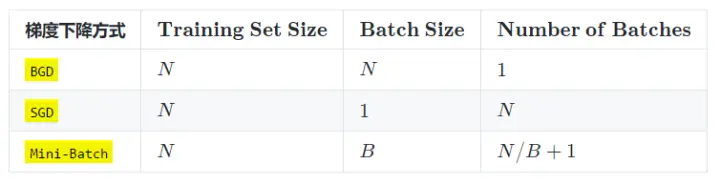
换算公式:

实际上,梯度下降的几种方式的根本区别就在于上面公式中的 Batch_Size 不同
举个例子:
mnist 数据集有60000张图片作为训练数据,10000张图片作为测试数据。假设现在选择 Batch_Size = 100 对模型进行训练。迭代30000次。
每个 Epoch 要训练的图片数量:60000(训练集上的所有图像)
训练集具有的 Batch 个数: 60000/100=600
每个 Epoch 需要完成的 Batch 个数:600
每个 Epoch 具有的 Iteration 个数:600(完成一个Batch训练,相当于参数迭代一次)
每个 Epoch 中发生模型权重更新的次数:600
训练 10 个Epoch后,模型权重更新的次数: 600*10=6000
不同Epoch的训练,其实用的是同一个训练集的数据。第1个Epoch和第10个Epoch虽然用的都是训练集的60000图片,但是对模型的权重更新值却是完全不同的。因为不同Epoch的模型处于代价函数空间上的不同位置,模型的训练代越靠后,越接近谷底,其代价越小。
总共完成30000次迭代,相当于完成了30000/600=50个Epoch
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/2152.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
