坐标简介(有待完善)
正则坐标:
引入正则坐标主要还是为了处理约束问题的,也就是用直角坐标描述问题可能会有多余的自由度,比如一个粒子在一个圆环上运动,用直角坐标需要两个坐标,实际上只有角度一个坐标起作用。
正则坐标和正则动量本质上还是应该从拉式量出发而不是哈密顿量出发,并不是所有的体系都可以用哈密顿量描述。首先引入拉氏量L=T-V,T是动能,V是势能,T和V只含某个广义坐标q和q对时间的一阶导数,然后一步步照着教材上正则动量,正则变换做就是了,这个该怎么做其实主要具体问题具体分析,主要还是靠经验。不过首先你要理清楚整个问题有几个自由度,比如说一个自由粒子自由度是3,它在某条固定的曲线上运动自由度是1,也就是广义坐标只能有1个,再比如一个无约束的刚体自由度是6。
参考链接:https://zhidao.baidu.com/question/871483754023207212.html
广义坐标:
对于含有n个质点的质点系,在空间有3n个坐标。若这些质点间存在k个有限约束,则约束方程可写为:fs(x1,x2,…,x3n;t)=0(s=1,2…,k)。利用约束方程消去3n个坐标中的k个变量,剩下N=3n-k个变量是独立的。利用变量转换,可将这N个变量用其他任何N个独立变量q1,q2…,qN来表示。因此,n个x坐标可用N个q表示为xi=xi(q1,q2…,qN;t)(i=1,2…,3n)。这种相互独立的变量称为广义坐标,其数目N等于完整系统的自由度。
常用的广义坐标有线量和角量两种。例如,对约束在空间固定曲线上运动的质点,可用自始点计量的路程s作广义坐标;用细杆约束在竖直平面内摆动的质点,可用杆与铅垂线的夹角θ作广义坐标。广义坐标对时间的导数称广义速度。同样,因为问题需要也会有广义加速度、广义动量、广义角动量等。
例子
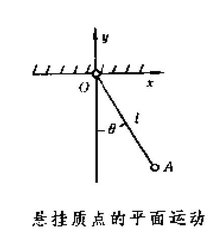

例如以长为l的细绳,悬挂一质点A于固定点O,使它在Oxy平面内运动(见图)。质点坐标为(x,y),即n=2,它与一个约束方程x+y=l相联系,故N=n-1=1,只有一个广义坐标。按问题的性质,最好选用绳与铅垂线的夹角θ为广义坐标。这样,便有 :
x=lsinθ,y=-lcosθ
参考:https://baike.so.com/doc/6661905-6875729.html
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/2150.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
