大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全家桶1年46,售后保障稳定
目录
最近又开始看图形学以及渲染相关的内容,再次遇到了齐次坐标的问题,找到两篇文章感觉还不错。转发一下~
第一篇描述了齐次坐标对于表示无穷远的点的作用,第二篇还描述了其对于点和向量的意义,第三篇描述高维度线性变换与低维度仿射变换的关系,可以辅助理解齐次坐标的意义~
第一篇:关于齐次坐标的理解(经典)
https://blog.csdn.net/janestar/article/details/44244849
先从一个问题开始:两条平行线可以相交于一点么?
在欧氏几何空间,同一平面的两条平行线不能相交,这是我们都熟悉的一种场景。
然而,在透视空间里面,两条平行线可以相交,例如:火车轨道随着我们的视线越来越窄,最后两条平行线在无穷远处交于一点。

欧氏空间(或者笛卡尔空间)描述2D/3D几何非常适合,但是这种方法却不适合处理透视空间的问题(实际上,欧氏几何是透视几何的一个子集合),2维笛卡尔坐标可以表为(x,y)。

如果一个点在无穷远处,这个点的坐标将会(∞,∞),在欧氏空间,这变得没有意义。平行线在透视空间的无穷远处交于一点,但是在欧氏空间却不能,数学家发现了一种方式来解决这个问题。
这个方法就是:齐次坐标
简而言之,齐次坐标就是用N+1维来代表N维坐标
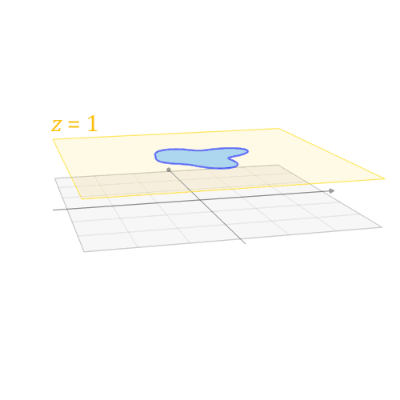
我们可以在一个2D笛卡尔坐标末尾加上一个额外的变量w来形成2D齐次坐标,因此,一个点(X,Y)在齐次坐标里面变成了(x,y,w),并且有 X = x/w Y = y/w
例如,笛卡尔坐标系下(1,2)的齐次坐标可以表示为(1,2,1),如果点(1,2)移动到无限远处,在笛卡尔坐标下它变为(∞,∞),然后它的齐次坐标表示为(1,2,0),因为(1/0, 2/0) = (∞,∞),我们可以不用”∞”来表示一个无穷远处的点了,哈哈。
为什么叫齐次坐标?
我们把齐次坐标转化为笛卡尔坐标的方法是前面n-1个坐标分量分别除以最后一个分量即可。
转化齐次坐标到笛卡尔坐标的过程中,我们有一个发现,例如:
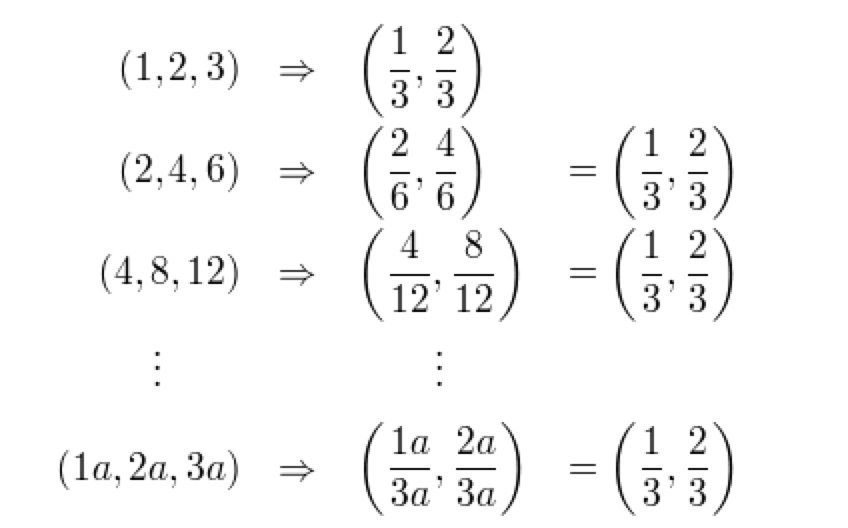
你会发现(1, 2, 3), (2, 4, 6) 和(4, 8, 12)对应同一个Euclidean point (1/3, 2/3),任何标量的乘积,例如(1a, 2a, 3a) 对应 笛卡尔空间里面的(1/3, 2/3) 。因此,这些点是“齐次的”,因为他们代表了笛卡尔坐标系里面的同一个点。换句话说,齐次坐标有规模不变性。
证明:两条直线可以相交
考虑如下方程组:
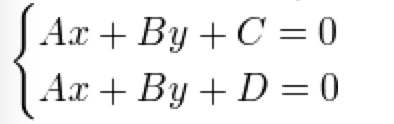
我们知道在笛卡尔坐标系里面,该方程组无解,因为C ≠ D,如果C=D,两条直线就相同了。
让我们在透视空间里面,用齐次坐标x/w, y/w代替x ,y,
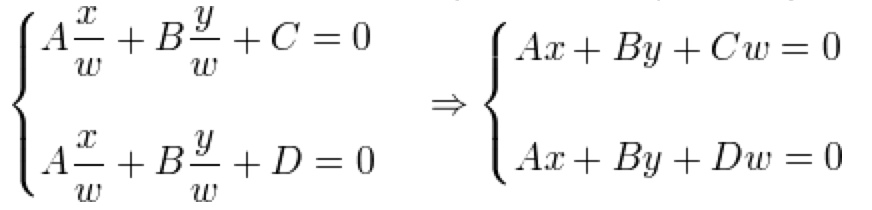
现在我们有一个解(x, y, 0),两条直线相交于(x, y, 0),这个点在无穷远处。
小结:齐次坐标在图形学中是一个非常基础的概念,例如3D场景映射到2D场景的过程中
第二篇:齐次坐标的理解
http://www.cnblogs.com/csyisong/archive/2008/12/09/1351372.html
一直对齐次坐标这个概念的理解不够彻底,只见大部分的书中说道“齐次坐标在仿射变换中非常的方便”,然后就没有了后文,今天在一个叫做“三百年 重生”的博客上看到一篇关于透视投影变换的探讨的文章,其中有对齐次坐标有非常精辟的说明,特别是针对这样一句话进行了有力的证明:“齐次坐标表示是计算机图形学的重要手段之一,它既能够用来明确区分向量和点,同时也更易用于进行仿射(线性)几何变换。”—— F.S. Hill, JR。
由于作者对齐次坐标真的解释的不错,我就原封不动的摘抄过来:
对于一个向量v以及基oabc,可以找到一组坐标(v1,v2,v3),使得v = v1 a + v2 b + v3 c (1)
而对于一个点p,则可以找到一组坐标(p1,p2,p3),使得 p – o = p1 a + p2 b + p3 c (2),
从上面对向量和点的表达,我们可以看出为了在坐标系中表示一个点(如p),我们把点的位置看作是对这个基的原点o所进行的一个位移,即一个向量——p – o(有的书中把这样的向量叫做位置向量——起始于坐标原点的特殊向量),我们在表达这个向量的同时用等价的方式表达出了点p:p = o + p1 a + p2 b + p3 c (3)
(1)(3)是坐标系下表达一个向量和点的不同表达方式。这里可以看出,虽然都是用代数分量的形式表达向量和点,但表达一个点比一个向量需要额外的信息。如果我写出一个代数分量表达(1, 4, 7),谁知道它是个向量还是个点!
我们现在把(1)(3)写成矩阵的形式:
v = (v1 v2 v3 0) X (a b c o)
p = (p1 p2 p3 1) X (a b c o),
这里(a,b,c,o)是坐标基矩阵,右边的列向量分别是向量v和点p在基下的坐标。这样,向量和点在同一个基下就有了不同的表达:3D向量的第4个代数分量是0,而3D点的第4个代数分量是1。像这种这种用4个代数分量表示3D几何概念的方式是一种齐次坐标表示。
这样,上面的(1, 4, 7)如果写成(1,4,7,0),它就是个向量;如果是(1,4,7,1),它就是个点。下面是如何在普通坐标(Ordinary Coordinate)和齐次坐标(Homogeneous Coordinate)之间进行转换:
-
(1)从普通坐标转换成齐次坐标时
如果(x,y,z)是个点,则变为(x,y,z,1);
如果(x,y,z)是个向量,则变为(x,y,z,0)
-
(2)从齐次坐标转换成普通坐标时
如果是(x,y,z,1),则知道它是个点,变成(x,y,z);
如果是(x,y,z,0),则知道它是个向量,仍然变成(x,y,z)
以上是通过齐次坐标来区分向量和点的方式。从中可以思考得知,对于平移T、旋转R、缩放S这3个最常见的仿射变换,平移变换只对于点才有意义,因为普通向量没有位置概念,只有大小和方向.
而旋转和缩放对于向量和点都有意义,你可以用类似上面齐次表示来检测。从中可以看出,齐次坐标用于仿射变换非常方便。
此外,对于一个普通坐标的点P=(Px, Py, Pz),有对应的一族齐次坐标(wPx, wPy, wPz, w),其中w不等于零。比如,P(1, 4, 7)的齐次坐标有(1, 4, 7, 1)、(2, 8, 14, 2)、(-0.1, -0.4, -0.7, -0.1)等等。因此,如果把一个点从普通坐标变成齐次坐标,给x,y,z乘上同一个非零数w,然后增加第4个分量w;如果把一个齐次坐标转换成普通坐标,把前三个坐标同时除以第4个坐标,然后去掉第4个分量。
由于齐次坐标使用了4个分量来表达3D概念,使得平移变换可以使用矩阵进行,从而如F.S. Hill, JR所说,仿射(线性)变换的进行更加方便。由于图形硬件已经普遍地支持齐次坐标与矩阵乘法,因此更加促进了齐次坐标使用,使得它似乎成为图形学中的一个标准。
以上很好的阐释了齐次坐标的作用及运用齐次坐标的好处。其实在图形学的理论中,很多已经被封装的好的API也是很有研究的,要想成为一名专业的计算机图形学的学习者,除了知其然必须还得知其所以然。这样在遇到问题的时候才能迅速定位问题的根源,从而解决问题。
第三篇:如何通俗的解释仿射变换?
https://www.matongxue.com/madocs/244.html
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/213959.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
