大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全家桶1年46,售后保障稳定
脚 本:makefile
工 具:vcs 和 verdi
文 章:1. 同步FIFO的设计和功能验证(附源码)
2. Verilog的亚稳态现象和跨时钟域处理方法
写在前面
路 线:
- 【verilog实战】同步FIFO设计(附源码RTL/TB)
- 【Verilog实战】异步FIFO设计(附源码RTL/TB)
- 【Verilog实战】UART通信协议,半双工通信方式(附源码RTL/TB)
- 【Verilog实战】SPI协议接口设计(附源码RTL/TB)
- 【Verilog实战】AMBA 3 APB接口设计(附源码RTL/TB)
- 【Verilog实战】AMBA AHB接口设计(附源码RTL/TB)
- 【Verilog实战】AMBA AXI接口设计(附源码RTL/TB)
- 【Verilog实战】UART2APB bridge 设计(附源码RTL/TB)
- 【Verilog实战】AHB2APB bridge 设计(附源码RTL/TB)
文章目录
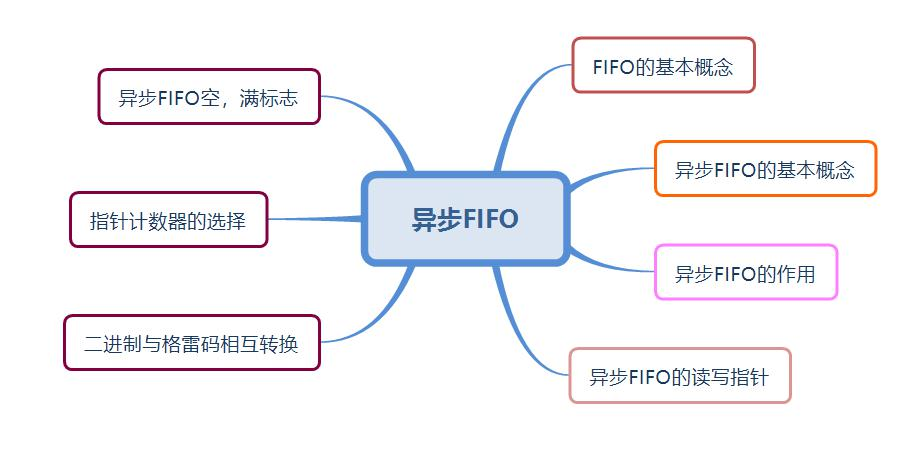
- 一、学习内容
- 二、异步FIFO
- (1)FIFO基本概念
- (2)异步FIFO基本概念
- (3)异步FIFO的作用
- (4)异步FIFO的读/写指针
- (5)异步FIFO空/满标志
- (6)指针计数器的选择
- (7)二进制与格雷码相互转换
- 三、Spec
- (1)Function descripton
- (2)Feature list
- (3)Block Diagram
- (4)Interface description
- (5)Timing
- 四、Design and Verification
- (1)RTL
- (2)Test bench
- (3)Analyse
- 五、Result
- (1)Write
- (2)Read
- (3)Write&Read
- (4)假满假空现象
- ✍✍☛ [题库入口](https://www.nowcoder.com/link/pc_csdncpt_xlin_verilog)
一、学习内容

二、异步FIFO
(1)FIFO基本概念
在写同步FIFO的时候,已经讲过FIFO的相关概念,可以参考(点击直达)。
(2)异步FIFO基本概念
对于同步FIFIO,主要是实现速率匹配,起到数据缓冲的作用。设计的关键在于array存储阵列或RAM空满标志的产生。设计的思路大概可以描述为:设置计数器elem_cnt,计数器的最小计数值为0,最大计数值,是array的最大存储深度。当写使能时,计数器计数+1,读使能时,计数器计数-1,读/写同时使能时,计数器计数值不变。当计数器的值为0时,表明此时的array没有存储数据,产生空标志;当计数值为最大存储深度值时,array存满了,此时产生满标志。详细可参考文章《同步FIFO设计与功能验证》
对于异步FIFO,主要是实现不同时钟域之间的数据交互。与同步FIFO有着明显的区别,同步FIFO是使用一个时钟,读写在同一个时钟域内。而异步FIFO使用两个时钟,读/写在不同时钟域内,这个过程就涉及了跨时钟域处理的过程,跨时钟域又会产生亚稳态问题,所以这是异步FIFO设计的一个重点,与同步FIFO一样,通过空满标志衡量存储器的使用情况,那么在异步FIFO中,空满标志产生的条件和方式是什么呢,这也是设计的重点。
(3)异步FIFO的作用
- 为什么需要异步FIFO?
用于在不同的时钟域(clock domain)之间安全地传输数据。而同步FIFO主要是解决数据传输速率匹配问题。 - 同步器(synchronizer)
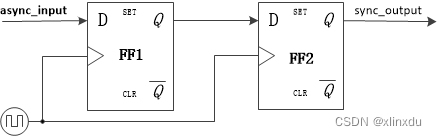
对于跨时钟域之间的信号传输,需要进行同步(synchronize)处理;一般来讲,我们可以采用同步器(由2~3级FF组成)对单bit的信号进行同步操作。注意,这里的打拍子是针对单bit信号而已的。
那么为什么不能用简单的同步器(synchronizer)对数据总线 ( 大于1bit)进行同步呢?下面分析一下。
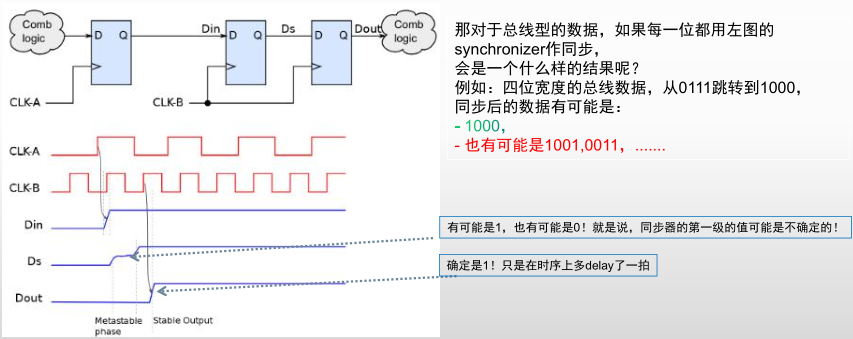
问※题:那么对于多bit信号的跨时钟域同步,可采用异步FIFO或者双口RAM。详细可参考另一篇文章《亚稳态和跨时钟域处理》。
(4)异步FIFO的读/写指针
- 写指针(write pointer)
▷ 始终指向下一次将要写入的数据的地址;
▷ 系统复位后(FIFO为空),写指针指向0地址;
▷ 每写入一笔数据,写指针地址加1; - 读指针(read pointer)
▷ 始终指向当前要读出的数据的地址;
▷ 系统复位后(FIFO为空),读指针指向0地址;
▷ 此时的数据是无效的,因为还没有数据写入,空标志有效;
(5)异步FIFO空/满标志
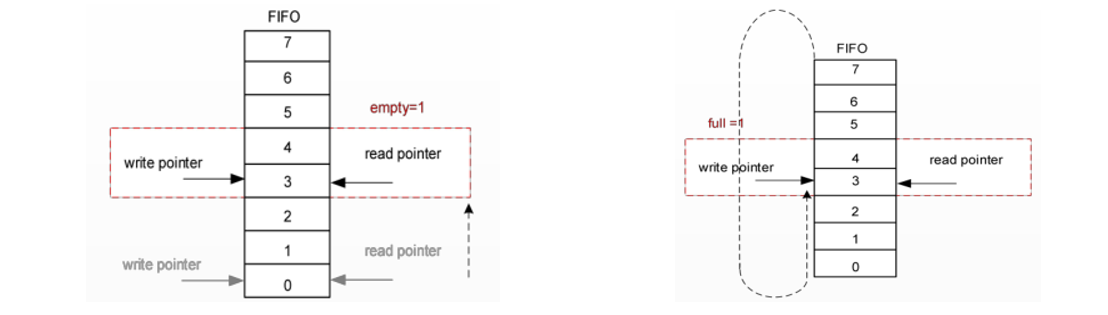
- 空标志(empty)
▷ 情形一,复位时,两指针都为0;
▷ 情形二,当读指针和写指针相等时,空标志=1; - 满标志(full)
▷ 当写指针和读指针最高位不同,其他相等时,满标志=1;
▷ 例如,写入的速度快,写指针转了一圈(wrap around),又追上了读指针; - 空满标志处理
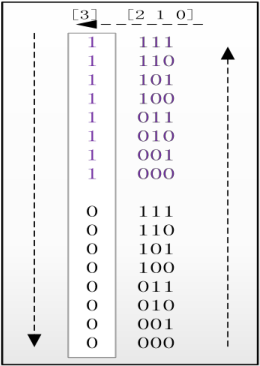
▷ 把读、写指针都额外增加1bit,假如FIFO的深度为8,理论上指针位只需要[2:0]。为了能够正确甄别空、满,需要将指针都扩展到[3:0]。
▷ 其中额外引入的最高位[3],用于辅助甄别是否已经发生了回环(wrap around)的情形。当指针计满FIFO的深度,折回头重新开始时,最高位MSB加1,其它位清0。
▷ 如果读写指针的最高位不同,就意味着写指针速度快,并已经多完成一次回环。
▷ 如果两个指针的最高位相同,就意味着双方完成了相同次数的回环。
(6)指针计数器的选择

- 普通二进制计数器(Binary counter)
- 在异步FIFO的设计中,读写两边要互相参考对方的指针,以便生成空、满标志;
- 数据同步问题:> 1 bit,从一个clock domain到另一个clock domain,由于亚稳态现象的出现,会导致数据出错;
极端情形:所有的数据位都变化;- 解决办法:采用
sample & hold机制,引入保持寄存器和握手机制,以确保接收端正确地采集到想要的数据,之后通知发送端,进行下一轮的数据传输;

- 格雷码计数器(Gray code counter):每次当从一个值变化到
相邻的一个值时,有且仅有一位发生变化;
- 由于格雷码的这种特性,我们就可以通过简单的synchronizer对指针(多位宽)进行同步操作了,而不用担心由于发生亚稳态而出现数据错误的情形;
- 但是对于我们习惯了二进制码的风格,这种码易读性稍差;
- 对于2的整数次幂的FIFO,采用格雷码计数器器; 接近2的整数次幂的FIFO, 采用接近2的幂次方格雷码修改实现;如果这两种都满足不了,就设计一种查找表的形式实现。所以,一般采用2的幂次方格雷码实现FIFO,会浪费一些地址空间,但可以简化控制电路;
需要注意:格雷码计数器适用于地址范围空间为2的整数次幂的FIFO,例如8, 16, 32, 64…
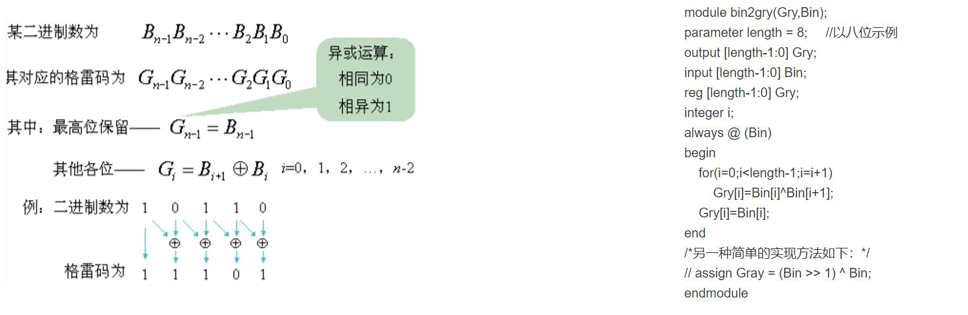
(7)二进制与格雷码相互转换
二进制到格雷码:
二进制码字整体右移一位,再与原先的码字按位做异或操作。
- 二进制转格雷码
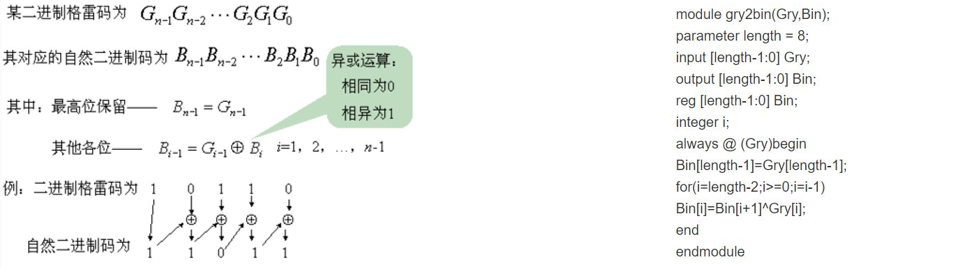
- 格雷码转二进制
三、Spec
(1)Function descripton
Asynchronization First in First out 通过控制两个不同时钟域的读/写操作,完成了两个时钟域之间数据的同步处理。
(2)Feature list
- 存储器采用宽度为16,深度为8的regs
- FIFO宽度、深度可配置
- 写时钟为3MHz,读时钟为2MHz
(3)Block Diagram
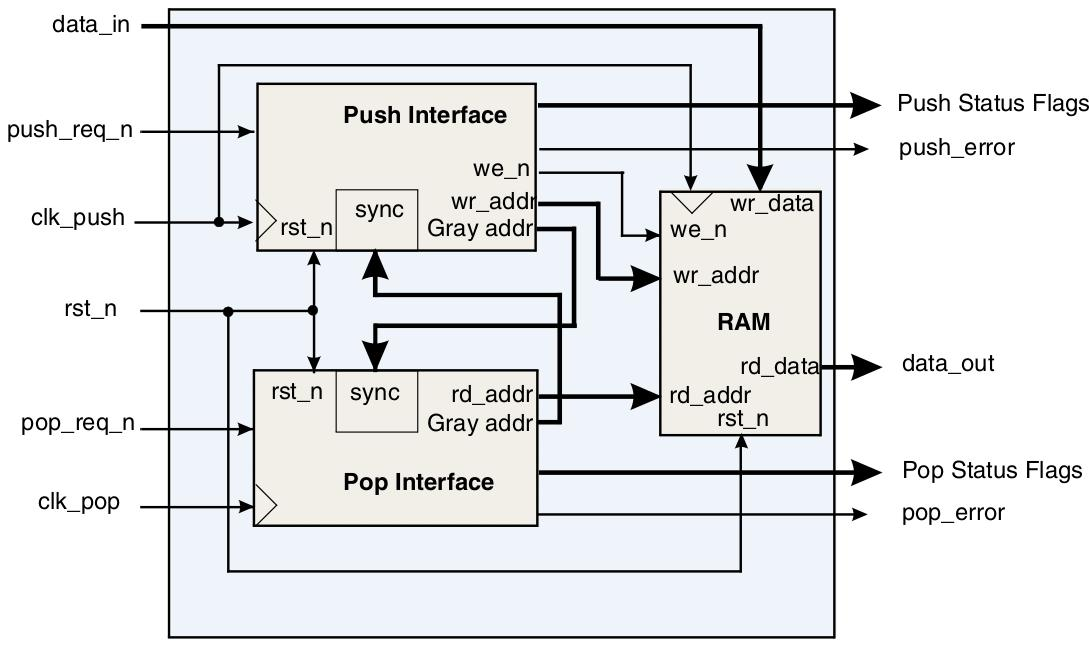 ☛ 模块设计可细分为写入接口(Push Interface)、读出接口(Pop Interface)、同步器(sync)和存储介质RAM(regs_array)
☛ 模块设计可细分为写入接口(Push Interface)、读出接口(Pop Interface)、同步器(sync)和存储介质RAM(regs_array)
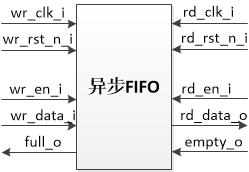
(4)Interface description
| Signal Name | Width | Direction | Description |
|---|---|---|---|
| wr_clk_i | 1 | input | write clock,2MHz |
| wr_rst_n_i | 1 | input | write reset signal |
| wr_en_i | 1 | input | write enable signal |
| wr_data_i | 16 | input | write data |
| full_o | 1 | output | full flag of regs_array |
| rd_clk_i | 1 | input | read clock,3MHz |
| rd_rst_n_i | 1 | input | read reset signal |
| rd_en_i | 1 | input | read enable signal |
| rd_data_o | 16 | input | write data |
| empty_o | 1 | output | empty flag of regs_array |
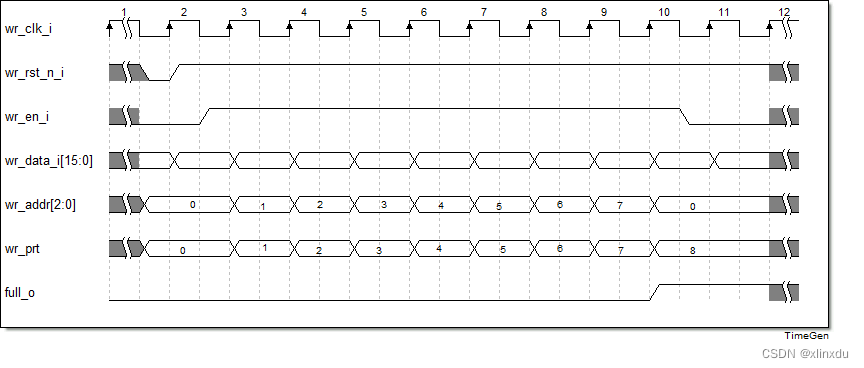
(5)Timing
- Write timing
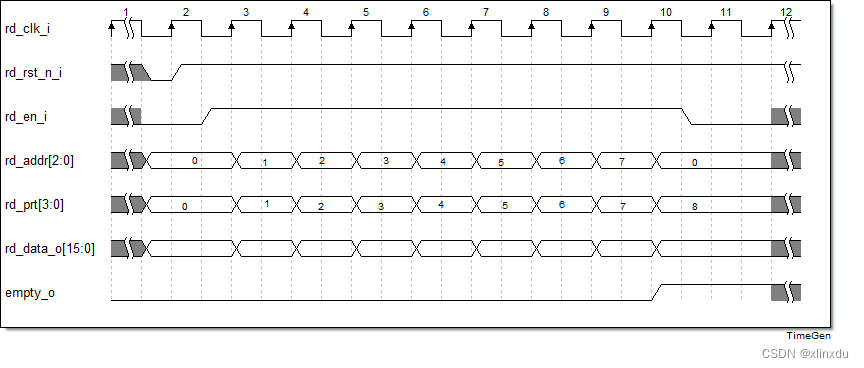
- Read Timing
四、Design and Verification
(1)RTL
//-- modified by xlinxdu, 2022/05/17
module async_fifo
#(
parameter DATA_WIDTH = 16 ,
parameter FIFO_DEPTH = 8 ,
parameter PTR_WIDTH = 4 ,
parameter ADDR_DEPTH = $clog2(FIFO_DEPTH)
)
(
//reset signal
input wire wr_rst_n_i,
input wire rd_rst_n_i,
//write interface
input wire wr_clk_i ,
input wire wr_en_i ,
input wire [DATA_WIDTH-1:0] wr_data_i,
//read interface
input wire rd_clk_i ,
input wire rd_en_i ,
output reg [DATA_WIDTH-1:0] rd_data_o,
//flag
output reg full_o ,
output reg empty_o
);
//-- memery
reg [DATA_WIDTH-1:0] regs_array [FIFO_DEPTH-1:0] ;
//-- memery addr
wire [ADDR_DEPTH-1:0] wr_addr ;
wire [ADDR_DEPTH-1:0] rd_addr ;
//-- write poiter,write poiter of gray and sync
reg [PTR_WIDTH -1:0] wr_ptr ;
wire [PTR_WIDTH -1:0] gray_wr_ptr ;
reg [PTR_WIDTH -1:0] gray_wr_ptr_d1 ;
reg [PTR_WIDTH -1:0] gray_wr_ptr_d2 ;
//-- read poiter,read poiter of gray and sync
reg [PTR_WIDTH -1:0] rd_ptr ;
wire [PTR_WIDTH -1:0] gray_rd_ptr ;
reg [PTR_WIDTH -1:0] gray_rd_ptr_d1 ;
reg [PTR_WIDTH -1:0] gray_rd_ptr_d2 ;
/*-----------------------------------------------\
-- write poiter and bin->gray --
\-----------------------------------------------*/
always @ (posedge wr_clk_i or negedge wr_rst_n_i) begin
if (!wr_rst_n_i) begin
wr_ptr <= {
(PTR_WIDTH){
1'b0}};
end
else if (wr_en_i && !full_o) begin
wr_ptr <= wr_ptr + 1'b1;
end
end
assign gray_wr_ptr = wr_ptr ^ (wr_ptr >> 1'b1);
/*-----------------------------------------------\
-- gray_wr_prt sync --
\-----------------------------------------------*/
always @ (posedge wr_clk_i or negedge wr_rst_n_i) begin
if (!wr_rst_n_i) begin
gray_wr_ptr_d1 <= {
(PTR_WIDTH){
1'b0}};
gray_wr_ptr_d2 <= {
(PTR_WIDTH){
1'b0}};
end
else begin
gray_wr_ptr_d1 <= gray_wr_ptr ;
gray_wr_ptr_d2 <= gray_wr_ptr_d1;
end
end
/*-----------------------------------------------\
-- read poiter and bin->gray --
\-----------------------------------------------*/
always @ (posedge rd_clk_i or negedge rd_rst_n_i) begin
if (!rd_rst_n_i) begin
rd_ptr <= {
(PTR_WIDTH){
1'b0}};
end
else if (rd_en_i && !empty_o) begin
rd_ptr <= rd_ptr + 1'b1;
end
end
assign gray_rd_ptr = rd_ptr ^ (rd_ptr >> 1'b1);
/*-----------------------------------------------\
-- gray_rd_ptr sync --
\-----------------------------------------------*/
always @ (posedge rd_clk_i or negedge rd_rst_n_i) begin
if (!rd_rst_n_i) begin
gray_rd_ptr_d1 <= {
(PTR_WIDTH){
1'b0}};
gray_rd_ptr_d2 <= {
(PTR_WIDTH){
1'b0}};
end
else begin
gray_rd_ptr_d1 <= gray_rd_ptr ;
gray_rd_ptr_d2 <= gray_rd_ptr_d1;
end
end
/*-----------------------------------------------\
-- full flag and empty flag --
\-----------------------------------------------*/
assign full_o = (gray_wr_ptr == {
~gray_rd_ptr_d2[PTR_WIDTH-1],gray_rd_ptr_d2[PTR_WIDTH-2:0]})? 1'b1 : 1'b0;
assign empty_o = (gray_rd_ptr == gray_wr_ptr_d2)? 1'b1 : 1'b0;
/*-----------------------------------------------\
-- write addr and read addr --
\-----------------------------------------------*/
assign wr_addr = wr_ptr[PTR_WIDTH-2:0];
assign rd_addr = rd_ptr[PTR_WIDTH-2:0];
/*-----------------------------------------------\
-- write operation --
\-----------------------------------------------*/
integer [PTR_WIDTH-1:0] i;
always @ (posedge wr_clk_i or negedge wr_rst_n_i) begin
if (!wr_rst_n_i) begin
for(i=0;i<FIFO_DEPTH;i=i+1)begin
regs_array[i] <= {
(DATA_WIDTH){
1'b0}};
end
end
else if (wr_en_i && !full_o) begin
regs_array[wr_addr] <= wr_data_i;
end
end
/*-----------------------------------------------\
-- read operation --
\-----------------------------------------------*/
always @ (posedge rd_clk_i or negedge rd_rst_n_i) begin
if (!rd_rst_n_i) begin
rd_data_o <= {
(DATA_WIDTH){
1'b0}};
end
else if (rd_en_i && !empty_o) begin
rd_data_o <= regs_array[rd_addr];
end
end
endmodule
(2)Test bench
//-- modified by xlinxdu, 2022/05/17
module tb_async_fifo;
reg rst_n_i ;
reg wr_clk_i ;
reg wr_en_i ;
reg [15:0] wr_data_i;
reg rd_clk_i ;
reg rd_en_i ;
wire [15:0] rd_data_o;
reg full_o ;
reg empty_o ;
initial begin
rst_n_i = 1;
wr_clk_i = 0;
wr_en_i = 0;
wr_data_i= 16'b0;
rd_clk_i = 0;
rd_en_i = 0;
# 1 rst_n_i = 0;
# 2 rst_n_i = 1;
end
initial begin
#20 wr_en_i = 1;
rd_en_i = 0;
#40 wr_en_i = 0;
rd_en_i = 1;
#30 wr_en_i = 1 ;
rd_en_i = 0 ;
#13 rd_en_i = 1 ;
#10
repeat(100)
begin
#5 wr_en_i = {$random}%2 ;
rd_en_i = {
$random}%2 ;
end
end
always #1.5 wr_clk_i = ~wr_clk_i ;
always #1 rd_clk_i = ~rd_clk_i ;
always #3 wr_data_i = {$random}%16'hFF;
async_fifo u_async_fifo(
.wr_rst_n_i(rst_n_i ),
.wr_clk_i (wr_clk_i ),
.wr_en_i (wr_en_i ),
.wr_data_i (wr_data_i),
.rd_rst_n_i(rst_n_i ),
.rd_clk_i (rd_clk_i ),
.rd_en_i (rd_en_i ),
.rd_data_o (rd_data_o),
.full_o (full_o ),
.empty_o (empty_o )
);
initial begin
#1000 $finish ;
$fsdbDumpfile("async.fsdb");
$fsdbDumpvars ;
$fsdbDumpMDA ;
end
endmodule
(3)Analyse
bug1:可以看到本该同步到异时钟域的格雷码写指针和格雷码读指针,却在自己的时钟域下打拍,导致后面产生的空满标志错误。

定位到读/写指针格雷码同步代码块
/*-----------------------------------------------\
-- gray_wr_prt sync --
\-----------------------------------------------*/
always @ (posedge wr_clk_i or negedge wr_rst_n_i) begin
if (!wr_rst_n_i) begin
gray_wr_ptr_d1 <= {
(PTR_WIDTH){
1'b0}};
gray_wr_ptr_d2 <= {
(PTR_WIDTH){
1'b0}};
end
else begin
gray_wr_ptr_d1 <= gray_wr_ptr ;
gray_wr_ptr_d2 <= gray_wr_ptr_d1;
end
end
/*-----------------------------------------------\
-- gray_rd_ptr sync --
\-----------------------------------------------*/
always @ (posedge rd_clk_i or negedge rd_rst_n_i) begin
if (!rd_rst_n_i) begin
gray_rd_ptr_d1 <= {
(PTR_WIDTH){
1'b0}};
gray_rd_ptr_d2 <= {
(PTR_WIDTH){
1'b0}};
end
else begin
gray_rd_ptr_d1 <= gray_rd_ptr ;
gray_rd_ptr_d2 <= gray_rd_ptr_d1;
end
end
两处更改了对应的时钟沿触发条件
/*-----------------------------------------------\
-- gray_rd_prt sync --
\-----------------------------------------------*/
always @ (posedge wr_clk_i or negedge wr_rst_n_i) begin
if (!wr_rst_n_i) begin
gray_rd_ptr_d1 <= {
(PTR_WIDTH){
1'b0}};
gray_rd_ptr_d2 <= {
(PTR_WIDTH){
1'b0}};
end
else begin
gray_rd_ptr_d1 <= gray_rd_ptr ;
gray_rd_ptr_d2 <= gray_rd_ptr_d1;
end
end
/*-----------------------------------------------\
-- gray_wr_ptr sync --
\-----------------------------------------------*/
always @ (posedge rd_clk_i or negedge rd_rst_n_i) begin
if (!rd_rst_n_i) begin
gray_wr_ptr_d1 <= {
(PTR_WIDTH){
1'b0}};
gray_wr_ptr_d2 <= {
(PTR_WIDTH){
1'b0}};
end
else begin
gray_wr_ptr_d1 <= gray_wr_ptr ;
gray_wr_ptr_d2 <= gray_wr_ptr_d1;
end
end
bug2:在只读情况下,写满之后,没有产生满标志。

定位到空满标志代码块
/*-----------------------------------------------\
-- full flag and empty flag --
\-----------------------------------------------*/
assign full_o = (gray_wr_ptr == {
~gray_rd_ptr_d2[PTR_WIDTH-1],gray_rd_ptr_d2[PTR_WIDTH-2:0]})? 1'b1 : 1'b0;
更改满标志的条件,因为在这里是比较格雷码,和原来二进制比较不同,二进制是高位取反,然后所有位相等即产生满标志。格雷码是最高位和次高位取反,然后所有位相同,即产生满标志。
/*-----------------------------------------------\
-- full flag and empty flag --
\-----------------------------------------------*/
assign full_o = (gray_wr_ptr == {
~gray_rd_ptr_d2[PTR_WIDTH-1:PTR_WIDTH-2],gray_rd_ptr_d2[PTR_WIDTH-3:0]})? 1'b1 : 1'b0;
五、Result
(1)Write

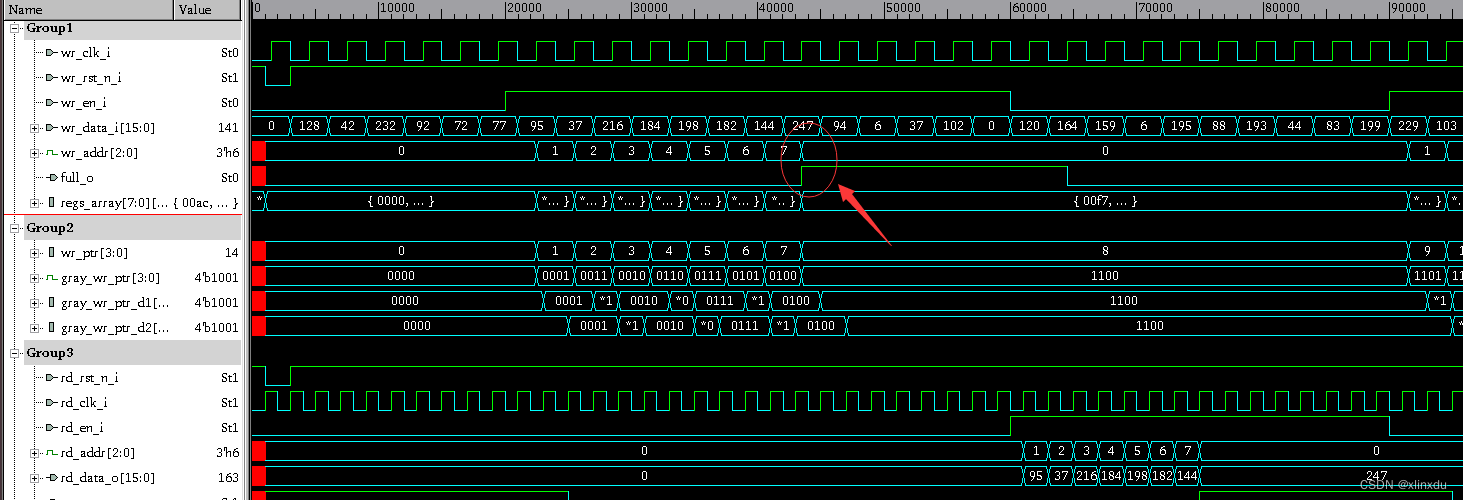
在只读阶段,读使能,写指针和写地址开始递增,并将data_i依次写入regs_array。在地址增加到写满了8个地址(0~7)后,写指针继续增加(回环,表示第二圈了),写地址回到第一个地址,并产生满标志。(写指针总指向将要写入的地址,前面有说)
(2)Read
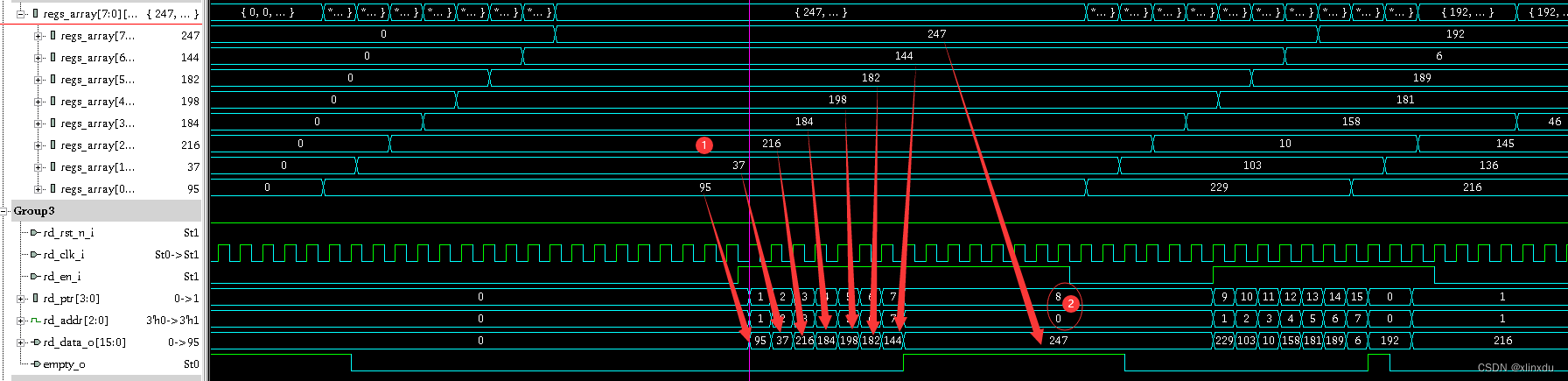
在只读阶段,这个阶段regs_array已经存满,开始读出数据,读指针和读地址开始递增,当读到regs_array的第八个存储地址(0~7)后,读指针继续增加(回环,表示第二圈了),读地址回到第一个地址,并产生空标志。(读指针总指向将要读出的地址,前面有说)
(3)Write&Read
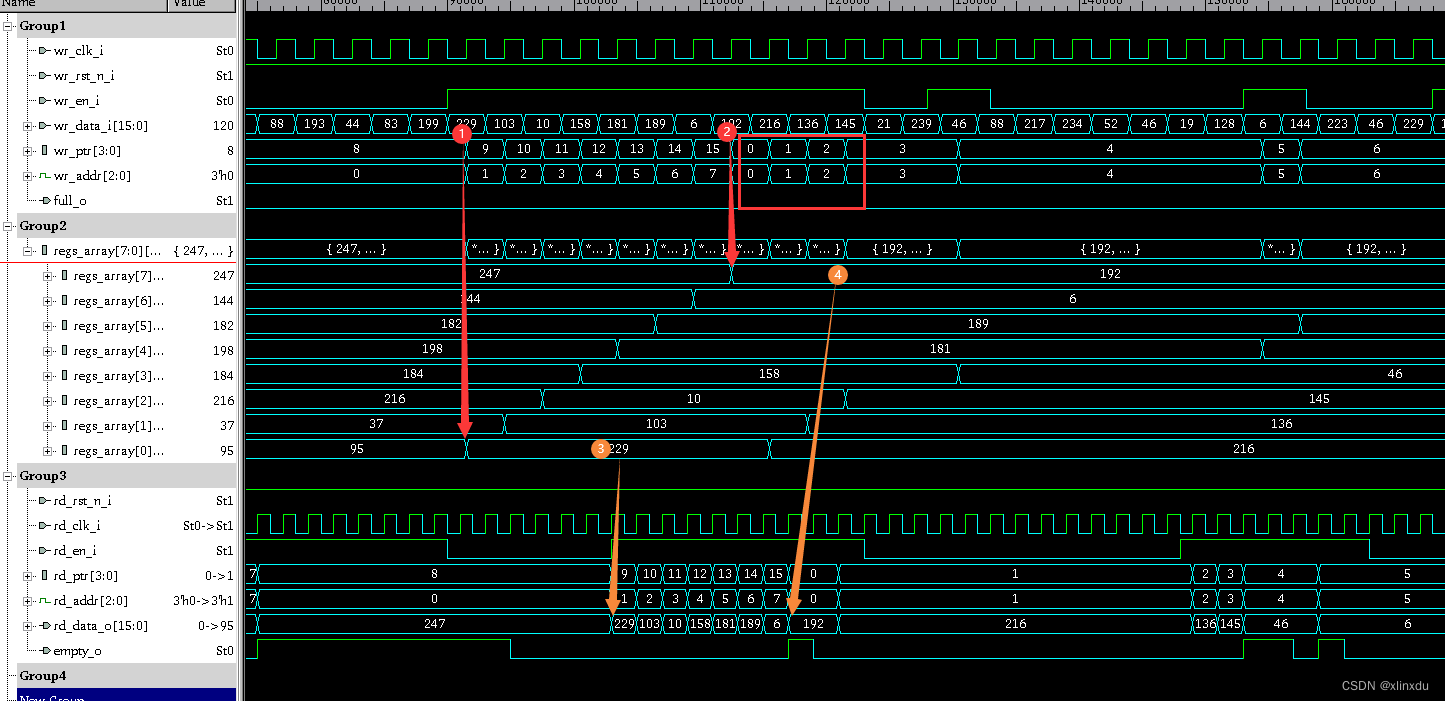
在读/写同时使能的时候,写操作依次往存储单元里面写入新数据,读操作依次往存储单元里读出数据,结果见上图。
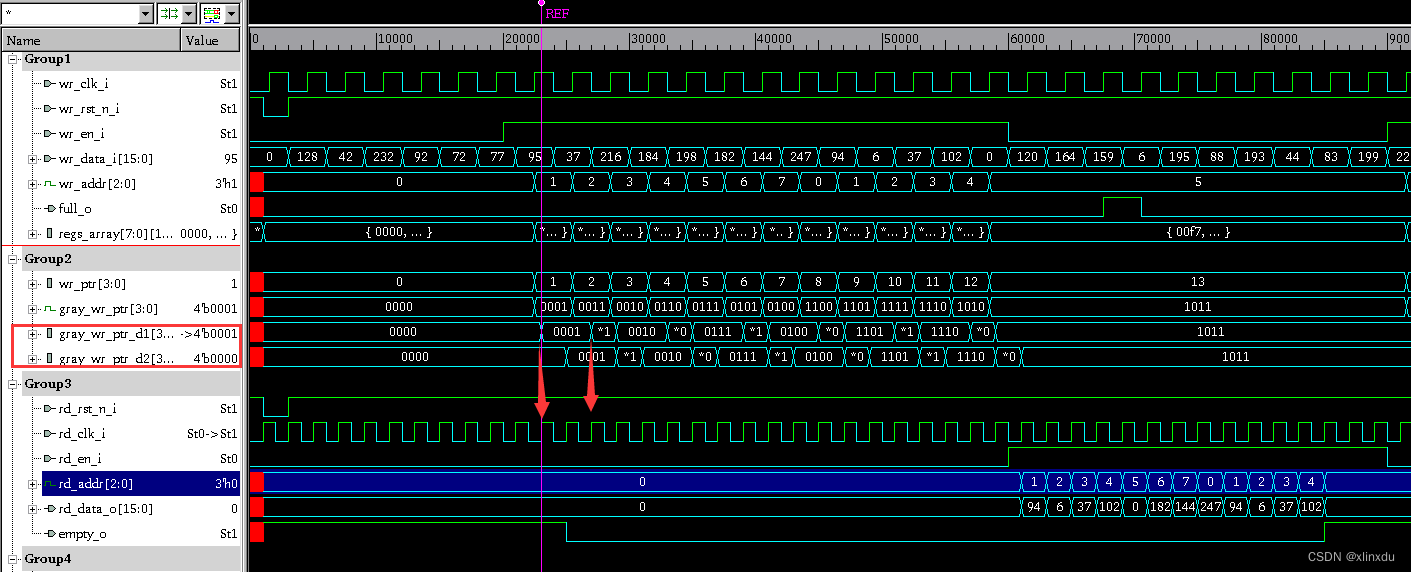
(4)假满假空现象

由上图标号1可以知道,在满标志拉低时刻之前,其实regs_array是一个假满的状态,因为这时刻之前,已经读出了三个数据了;由上图标号2可以知道,读空的时候,产生了空标志,其实regs_array是一个假空的状态,因为这时刻之前,写操作已经写入了两个数据。
※原因:因为在格雷码指针同步的时候,格雷码指针信号在两个时钟域之间存在两个时钟周期的延时,但这并不会影响FIFO的正常工作逻辑。
✍✍☛ 题库入口
经过一段时间的沉淀,发现入行IC行业,自己的底子还是很差,写的文章质量参差不齐,也没能解答大家的疑问。还是要实打实从基础学起,由浅入深。因此决定推倒重来,通过补充/完善基础知识的同时,通过题库刷题不断提高自己的设计水平,题库推荐给大家(点击直达),<题库记录>栏目不定期更新,欢迎前来讨论。2022.08.29 记
作者:xlinxdu
版权:本文版权归作者所有
转载:未经作者允许,禁止转载,转载必须保留此段声明,必须在文章中给出原文连接。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/203466.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
