大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全家桶1年46,售后保障稳定
首先要记住:读数据永远是从低地址开始的!!!
正文开始
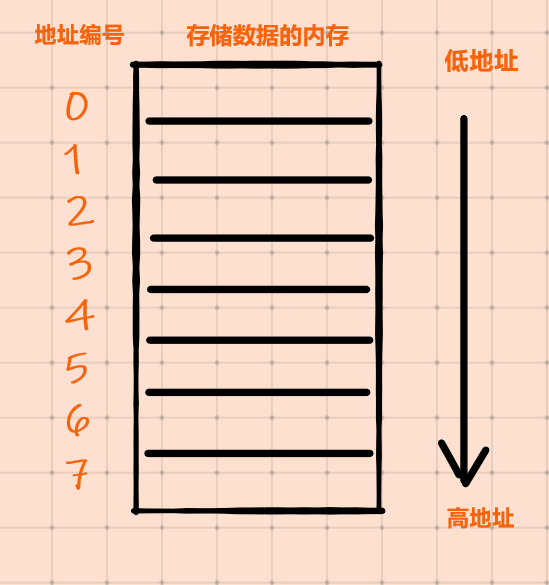
什么是低地址、高地址?
地址编号小的是低地址,地址编号大的是高地址

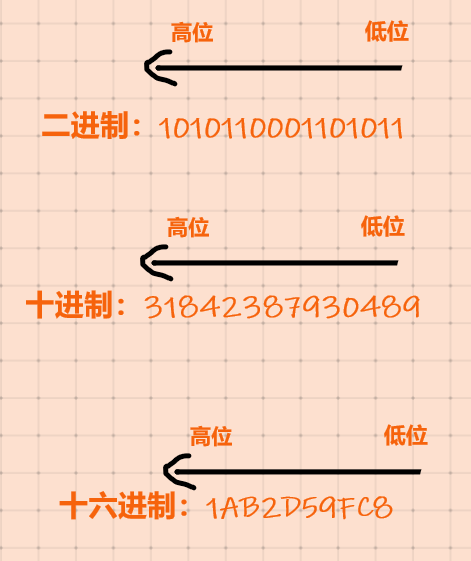
什么是数据的低位、高位?
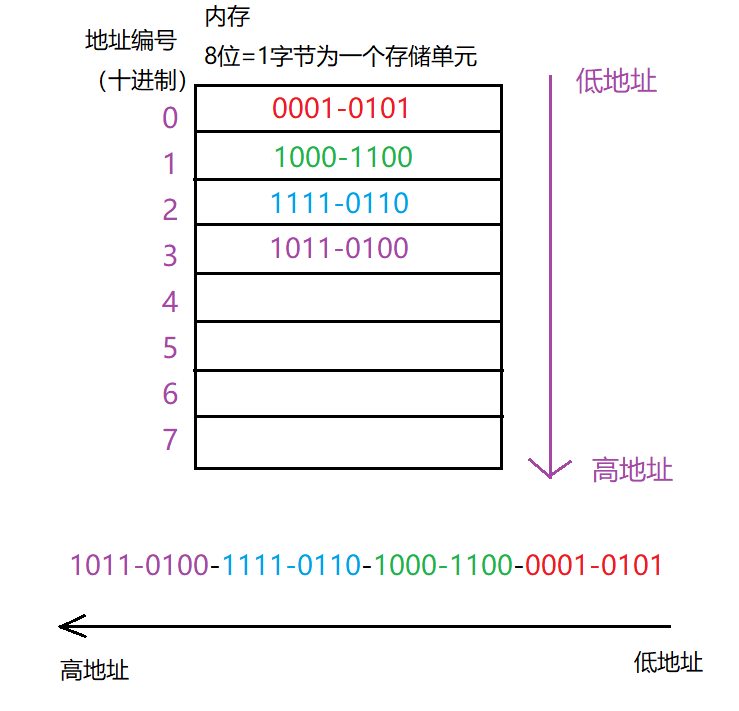
小端模式
数据的低位放在低地址空间,数据的高位放在高地址空间
简记:小端就是低位对应低地址,高位对应高地址
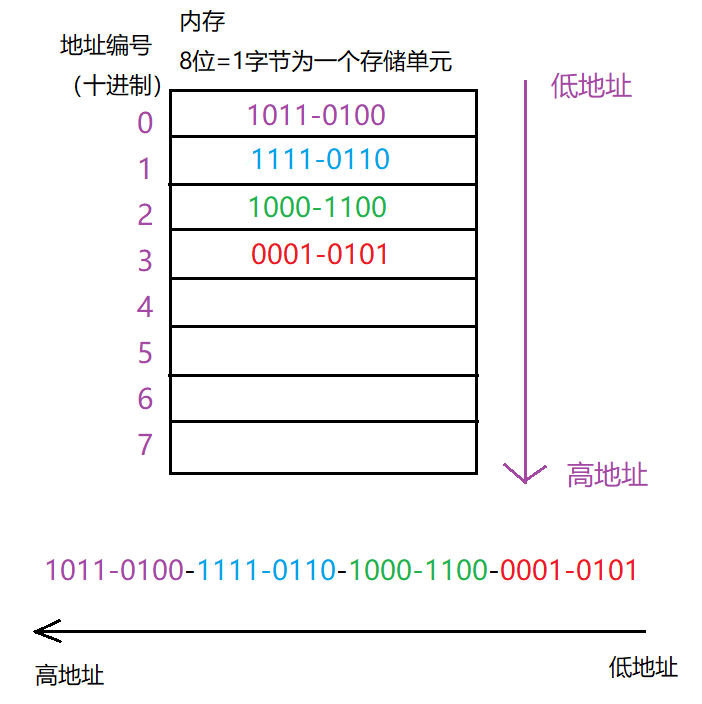
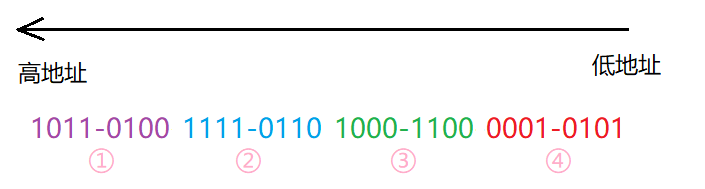
存放二进制数:1011-0100-1111-0110-1000-1100-0001-0101
注意注意:我们在存放的时候是以一个存储单元为单位来存放,存储单元内部不需要再转变顺序啦!!
就例如下面的低位0001-0101存放在0号地址,我们不需要把它变成1010-1000,不需要!!不需要!!
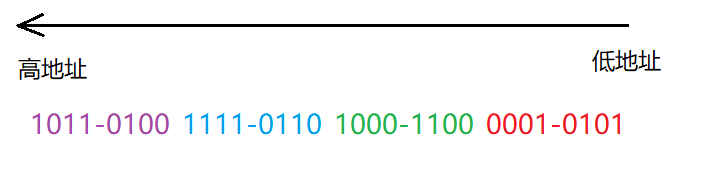
读取数据:注意一定一定是从低地址读起!!!我们知道这是小端存储,所以在读出来的时候会从低位开始放!!!
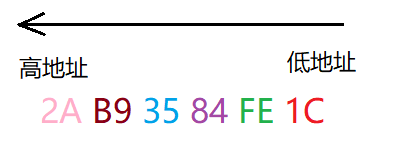
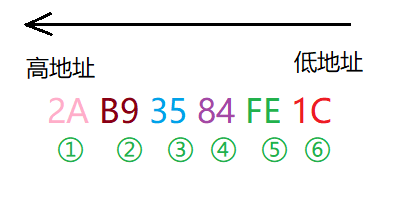
存放十六进制数:2AB93584FE1C
十六进制数每一位转化为二进制就是4位:2对应0010,A对应1010,以此类推。所以在存放的时候两个十六进制位就占用一个存储单元
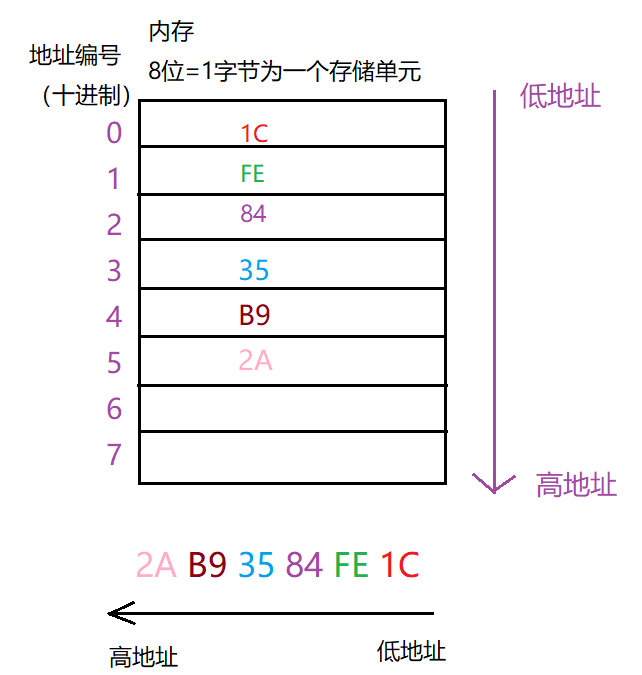
读取数据:注意从低地址开始读取!!
大端模式
数据的高位放在低地址空间,数据的低位放在高地址空间
存放二进制数:1011-0100-1111-0110-1000-1100-0001-0101
读取数据:注意仍然是从低地址开始读,我们知道这是大端模式,当我们从0号地址读到1011-0100时,我们知道它是高位,所以放到高位的位置上去
存放十六进制数:2AB93584FE1C
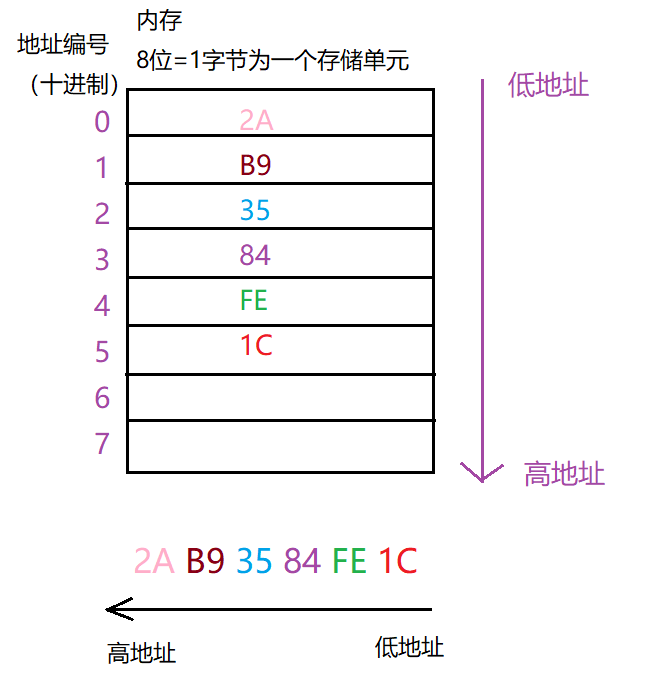
读取数据:注意从低地址开始读取,读到的从高地址开始放!!!
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/200878.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
