大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺


加入高工智能汽车行业群(自动驾驶行业4群,车联网智能座舱3群,智能商用车行业群),加微信:15818636852,并出示名片,仅限智能网联汽车零部件及OEM厂商。

目前为止,特斯拉的Autopilot一共经历了三代硬件的更迭,分别是Autopilot1.0,2.0和2.5。按照目前特斯拉的公开信息,Autopilot3.0硬件将可能在今年底和自主研发的芯片一起推出。
此前,《高工智能汽车》陆续独家深入解读Autopilot几代硬件平台核心传感器的迭代历史,以及相关的供应商变化。(点击阅读上期解读:毫米波雷达篇 、 摄像头视觉篇)。
本期,我们解读特斯拉搭载的超声波雷达的几代变化。
一、Model S 2012-2016款,Autopilot1.0版本
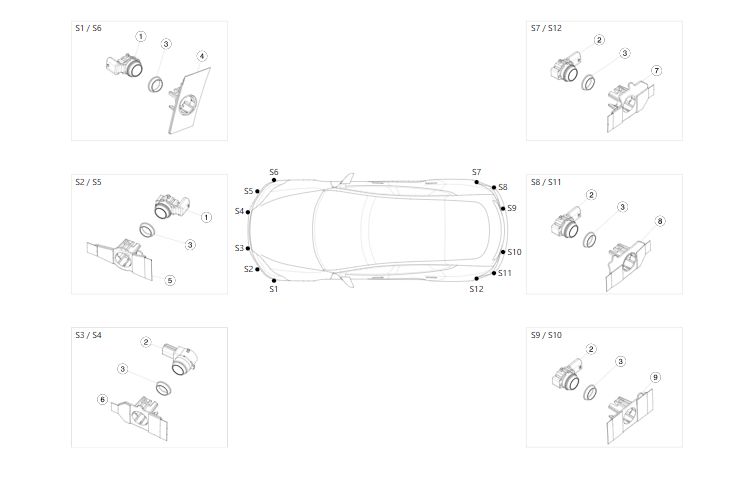
搭载来自博世的第五代超声波传感器(12颗),包括ParkAid ECU。最大测距4.5米(特斯拉官方宣称可以达到4.88-5米),最小测距15厘米(精确测定),目标物检测最小3cm;

不过由于风和传感器上的抖振,传感器在较高的速度下缩小了范围,它们在泊车或低速时工作得最好。
按照当时的功能配置,其中在泊车辅助时仅使用前后8颗雷达工作;在Autopilot辅助驾驶时,使用全部12颗雷达工作。
而去年上市的第六代博世超声波传感器最大测距5.5米,最小测距15厘米(精确测定),目标物检测最小3cm;同时满足ASIL B要求,并且满足NCAP2020 AEB-Rear的五星要求。每个超声波都提供一个信号代码,所以使得探测精度更加高,能够实现在低速状况下的紧急制动。


2、Model S/X,Model 3 Autopilot 2.0版本
搭载来自法雷奥的超声波传感器(12颗),特斯拉官方曾宣称2.0版本超声波传感器的探测最大距离是8米。

3、V9.0软件版本升级后的变化
在Autopilot中对于超声波传感器的使用也在发生一些变化,以最新发布的9.0版本软件为例,盲点监控的功能改为有8颗摄像头形成360度环视监控,以应对高速公路的路况。在V9.0之前的版本,盲点监控依赖于超声波传感器,其最大有效测距为8米。
Model S的车主手册是这样描述的:“摄像头会监控你正在行驶的车道上的标记,超声波传感器会监控周围的区域,以及是否有车辆或其他物体存在的盲点。”
关于360全景的官方描述:
现在,我们的全自动驾驶硬件在每一款Model S、Model X和Model 3中的所有8个外部摄像头都处于活动状态,通过对周围车辆的360度可视化,可以更好地感知道路上的情况。
盲点监控,以前只依靠超声波传感器,现在使用侧面和背面的摄像头来检测车辆并显示在屏幕上。当转弯信号被激活,并且在你的盲点检测到车辆时,屏幕上显示的车道线变为红色。

不过,实际的车主演示发现,仪表盘上的图像显示似乎有些滞后,尤其是当其他车道车辆超越特斯拉车时。也就是说,考虑到盲点监控使用的是来自侧面和后部摄像机的视频反馈,这些轻微的滞后可能是由于系统从一个摄像机切换到另一个摄像机造成的。
另一个变化是召唤功能。在特斯拉V8.1(2018.24.1)软件更新后,启用的召唤测试功能,自定义召唤菜单允许司机设置保险杠间隙、召唤距离和侧面间隙的距离。

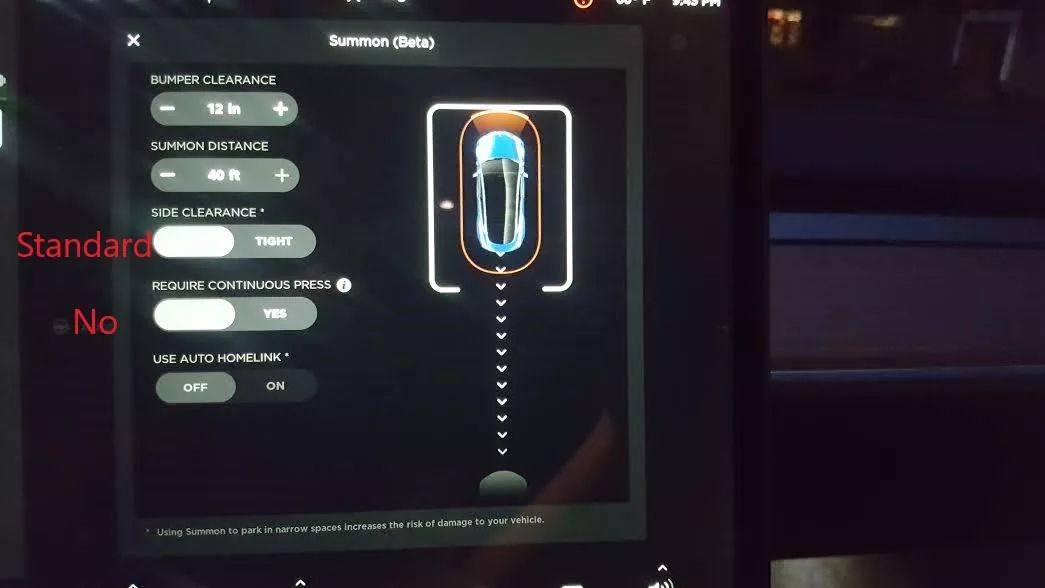
但召唤测试版本,只能在车辆纵向对正停车位的情况下启动,以便车辆可以在前进档或倒车档直行进入停车位。车主还必须将车辆停放在距停车位12 米的范围内(这是目前可以操控行进的最大距离)。
去年10月,马斯克表示,与目前仅使用超声波传感器的召唤系统不同,“新召唤系统”将开始使用来自Autopilot摄像头的数据。但目前销售至中国市场的Model 3还不具备这个功能。
4、超声波传感器的更多应用
不过一直以来,特斯拉都在投入大量精力集成传感器,这一点在Autopilot HW2.0硬件版本上的摄像头的安装位置上就可以很明显看出。同时,在超声波传感器(这个被很多主机厂所轻视的)上特斯拉也在持续创新。
比如,众所周知的Model X上的自动鹰翼门,车门内侧加装了超声波传感器以探测车辆周围的环境,并采用电动开启方式。

这种应用推动特斯拉开发了新的传感器集成方法,因为埃隆·马斯克不喜欢在门中间放置可见传感器。他在发布Model X时表示:
“我们实际上开发了一种新的超声波传感器,可以通过金属来做声纳。为了避免超声波传感器裸露在门那里,这在美观上并不理想。
早在2015年8月,特斯拉就发布了集成超声波传感器(可以穿透金属)的方法,并获得了专利申请。
专利显示,在超声波传感器和车门面板之间,增加了一层“硅树脂”制成的基体材料以及一个耦合元件。同时,在面板中使用放置在内部表面的阻尼材料来阻尼声波。
然后,通过声学泡沫来吸收空气中的声波,车门内的阻尼材料有开口,与上述耦合元件对接,并且开口面积大于耦合元件,从而使得超声波传感器可以通过开口接受回波和返回波。
虽然鹰翼舱门上的超声波传感器在打开过程中能够探测到离它很近的物体,但当它关闭时,却无法探测到在门下方的手指或障碍物,这个时候主要依靠“压力传感器”起作用。





有立场,有态度的智能网联汽车全产业链服务平台
商务合作咨询:15818636852 郑先生

长按关注:高工智能汽车公众号
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/197682.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
