大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
PDAF点亮主要参考《MT6763_MT6757_PDAF_Driver_and_Buf_mgr_Porting_Guide.pdf》
1、什么是PDAF
1.1 PDAF的原理
在了解相位对焦PDAF,Phase Detection Auto Focus之前,在网上肯定会搜到其他对焦方式。比如对比度对焦(反差对焦)CDAF,Contrast Detection Auto Focus、激光对焦LDAF,Laser Detection Auto Focus、双核对焦等。
下面整理三种对焦方式对比
| 对焦方式 | 原理 | 优点 | 缺点 |
| 对比度对焦 CDAF |
对焦的过程就是通过移动镜片来使对焦区域的图像达到最清晰的过程,所以对焦成功以后,直观的感受就是焦点的清晰度最高,而焦点以外的区域则表现为相对模糊状态 | 成本低,精度高 | 速度慢 |
| 相位对焦 PDAF |
单反相机普遍采用相位对焦系统,相比于数码单反相机上的相位对焦,手机上的相位对焦则是直接将自动对焦传感器与像素传感器直接集成在一起,即从像素传感器上拿出左右相对的成对像素点,分别对场景中的物体进行进光量等信息的检测,通过比对左右两侧的相关值情况,便会迅速找出准确的对焦点,之后镜间马达便会一次性将镜片推动到相应位置完成对焦 | 对焦速度极快,降低处理器计算负担 | 弱光环境下容易对不上焦,成本较高 |
| 激光对焦
LDAF |
后置摄像头旁边的红外激光传感器向被摄物体发射低功率激光,经过反射后被传感器接收,并计算出与被摄物体之间的距离 | 成功率高 | 弱光环境下,对焦一般,成本高。激光对焦在使用上还是一定限制 |
下面左图展示了成像的现象,有前焦,对焦和后焦。推lens的方向和幅度,由当前的相位差和模组的PD calibration data来决定
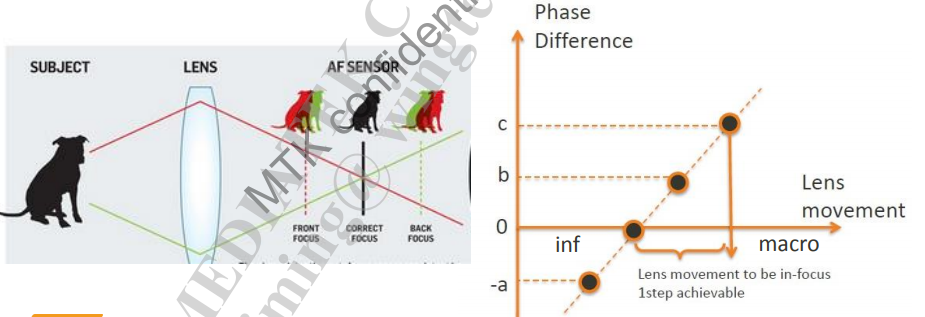

PDAF 通过对比L/R PD pixel构成的两幅图画,PD算法计算出相位差。
根据相位差和模组 PD calibration data,估算出像距,从而移动lens快速对焦
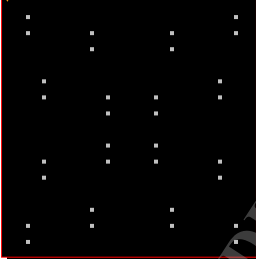
PD点分布长这样
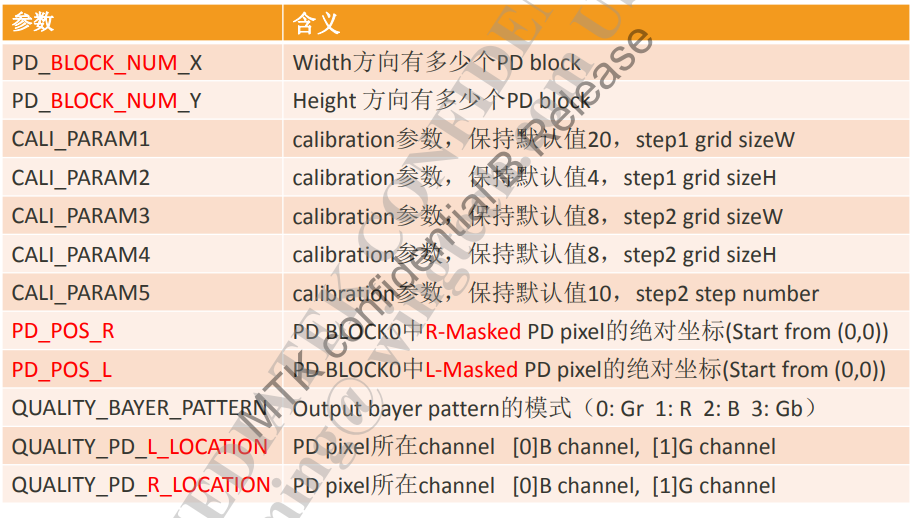
1.2 PDAD INI 文档
INI文档是sensor厂商给模组厂商提供做PD calibration时的配置文件,描述PD Sensor的输出信息和PD calibration 参数,其内容会被烧录到eeprom

1.3 PD Type

/alps/kernel-4.14/drivers/misc/mediatek/imgsensor/inc/kd_imgsensor_define.h
enum IMGSENSOR_PDAF_SUPPORT_TYPE_ENUM {
PDAF_SUPPORT_NA = 0,
PDAF_SUPPORT_RAW = 1,
PDAF_SUPPORT_CAMSV = 2,
PDAF_SUPPORT_CAMSV_LEGACY = 3,
PDAF_SUPPORT_RAW_DUALPD = 4,
PDAF_SUPPORT_CAMSV_DUALPD = 5,
PDAF_SUPPORT_RAW_LEGACY = 6,
};二、驱动相关
具体配置还得看sensor spec 和MTK PDAF 点亮文档
vendor仓:

kernel仓:


发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/196597.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
