大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
一、准备工作
1. 一个装有Ubuntu14.04镜像文件的U盘启动盘
2. 电脑安装EASYBCD、分区助手软件
3. 保证电脑硬盘有一个分区有足够的空间安装ROS,和Ubuntu14.04
二、制作启动盘
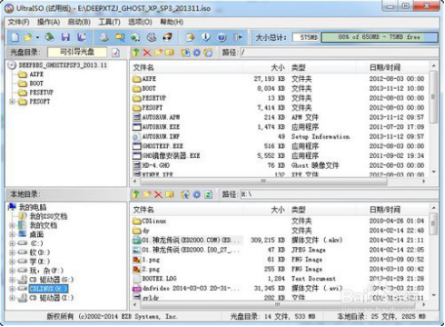
1.首先我们先安装软碟通,完成安装后打开软碟通,文件->打开,打开我们的iso镜像

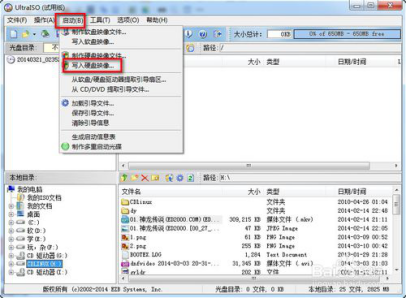
2.然后选择我们的U盘,然后点击启动->写入硬盘映像
3.写入方式有zip和hdd两种,一般我们选择hdd或hdd+,选择了写入方式之后要先格式化,格式化完毕之后点击写入等待写入完毕即可
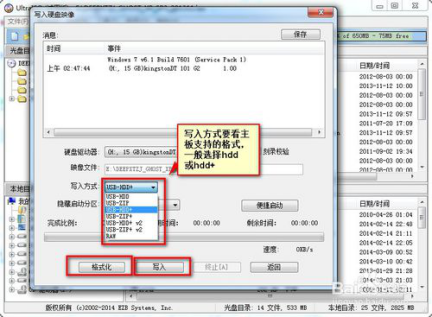
选择好写入方式直接写入即可完成U盘启动盘的制作
三、安装Ubuntu14.04
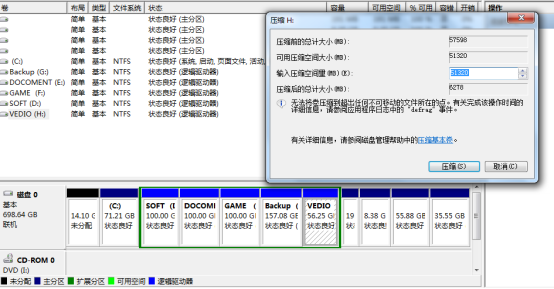
(1)在电脑磁盘中为Ubuntu分配空闲空间。
右键点击我的电脑》管理》磁盘管理,选择一个空间较大的盘,右键选择压缩卷。(安装ros最好大于100G),可根据需要划分,划分后发现我们的硬盘空间变小了。(注意:这种分区我们在Win7里面不能直接查看Ubuntu里的分区,但是在Ubuntu我们可以访问放在硬盘上的任何东西,也就是可以直接查看Win7系统的分区。)
这里适应进压缩好的,最后四个盘已经安好了UBUNTU,从自己的一个分盘,右键选着压缩卷,选好压缩盘大小,即可获得一个绿色的可用空间。
(2)将启动盘插在电脑上,启动电脑,进入电脑BOOT(一般按F12,每个牌子电脑有所不同)
在boot里选着你的U盘启动,如下图,然后就可进入Ubuntu14.04安装界面,这里最好连接有线网络

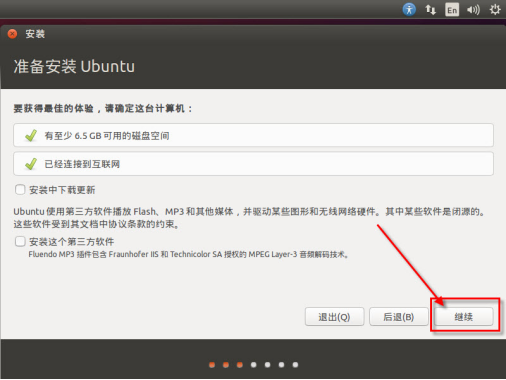
1. 将滚动条往下拉,选择“中文(简体)”,然后,点击“现在安装”;
这里选择安装第三方库,点击“继续,更新3-5分钟”;
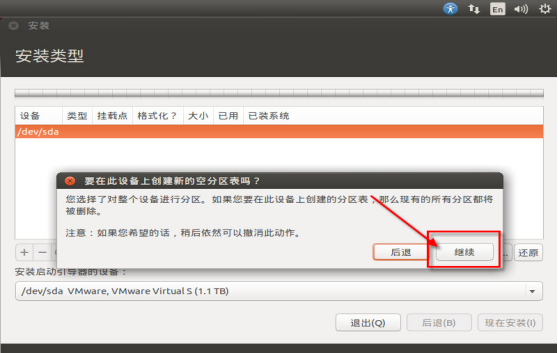
对于安装双系统的的在这里,手动磁盘分区。点击“其他选项”,再点击“继续”(注意,如果你的电脑只安装Ubuntu系统,这里直接选着第一个选项,可省略下面的分区步骤)这个过程可能要等3-5分钟

点击“新建分区表(这里有我们在win7上压缩出来的盘);

点击“继续”
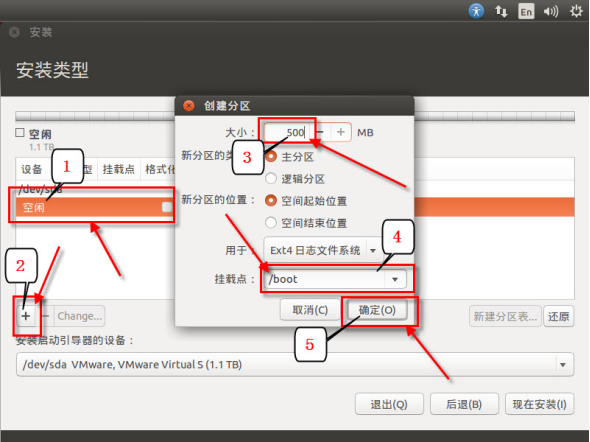
注意:分区过程中,要分出4个区,boot分区,交换分区,根分区,home分区,这里前三个分区分区类型一定是“逻辑分区”;只有home分区是“主分区”,下面的图有可能选错,要注意,其他按图示选择
boot分区(这里是安装Ubuntu的启动文件的,一般给个200M就行),这里注意下图界面选项
交换空间(SWAP)这是给内存进行分区的,一般选择自己的内存大小,注意下图选项

根分区,主要是安装系统的,一般给50个G,注意下图界面选型

home分区,主要你平常存储东西的空间,可以分大点,注意界面选项
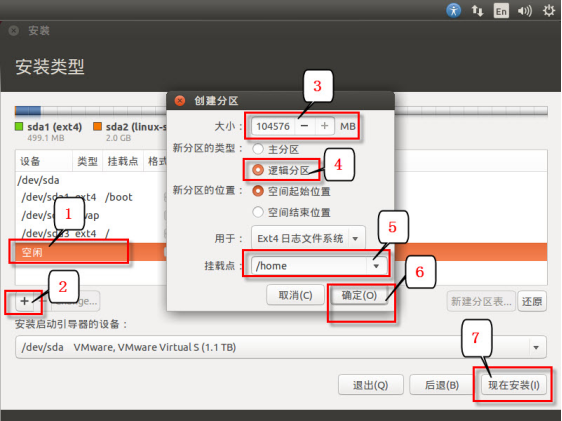
直接点击“继续”;
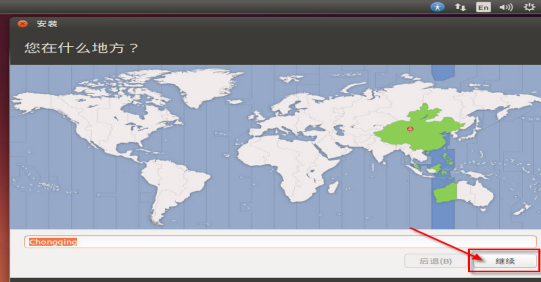
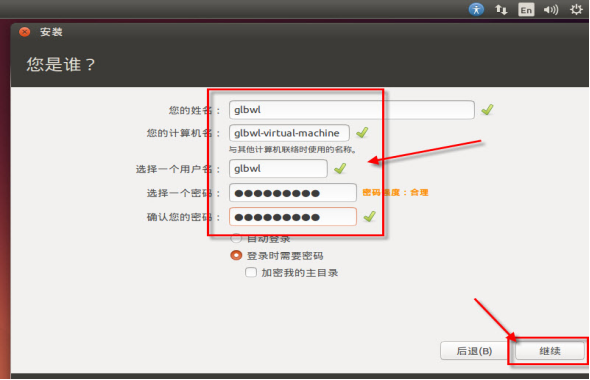
输入用户信息,然后点击“继续”
正在安装中,请等待;
安装完成,点击“现在重启”;
三、设置启动引导项
重启后我们不会进入到Ubuntu系统,因为我们的主板中还没有Ubuntu的启动引导项,我们需要进入WIN7,利用EASYBCD 来设置启动项
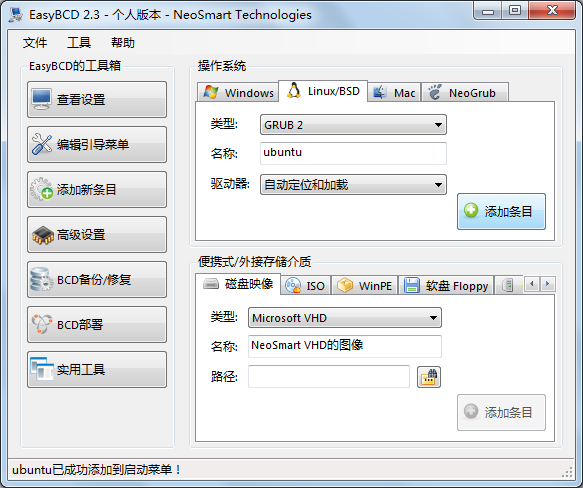
1.打开easyBCD,点击“添加新条目”,选择“linux/BSD”,类型选择’GRUB2’,名称自己选这里设为“ubuntu”,驱动器选择“自动定位和加载”,这里可下拉,选择我们创建的BOOT分区,如果你分的boot分区是200M,这里可能只有190M,点击“添加条目”,显示“ubuntu已成功添加到启动菜单”即建好ubuntu的启动项。如下图:
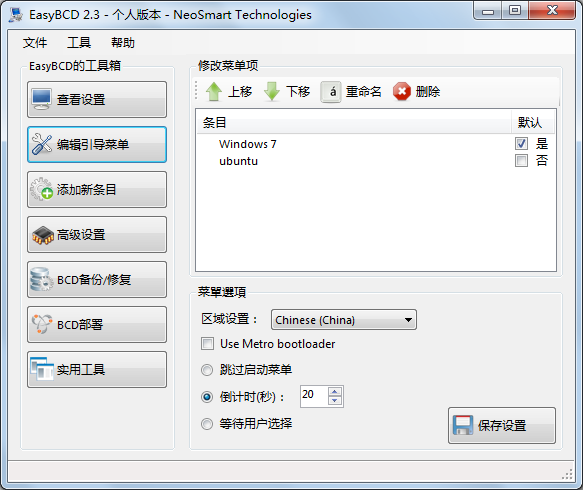
2.此时点击“编辑引导菜单”可以看到菜单项中windows 7 和ubuntu两项,默认为windows7。此时切记要修改“菜单选项”,选择“等待用户选择”或者“倒计时(秒)”,不能勾选“跳过启动菜单”!!!应为跳过启动菜单你就无法看到ubuntu的启动选项。最后,点击“保存设置”。如下图:
3.关闭easyBCD,重启即可看到win7的启动引导界面和我们设置的ubuntu启动选项。如下图:
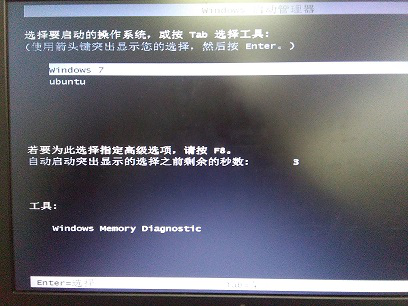
4.从此就可以在win7和ubuntu之间畅快转换了!!!大功告成!!!放张图美一美!
四、安装ROS
1.在安装ROS前需要在Ubuntu重设置一下软件更新的对话框
1)Ubuntu软件
a.可从互联网下载:mian、universe、restricted、multiverse和源代码前面打勾。(都要打勾)

b.下载服务器:下载服务器站点可以随便选,建议选择国内的,我选择的是http://mirrors.tuna.tsinghua.edu.cn,现在有阿里云的境外节点建议使用;以后更改需要用户密码验证。
2)其他软件:该页面显示的四个选项全部勾选,如图3所示:
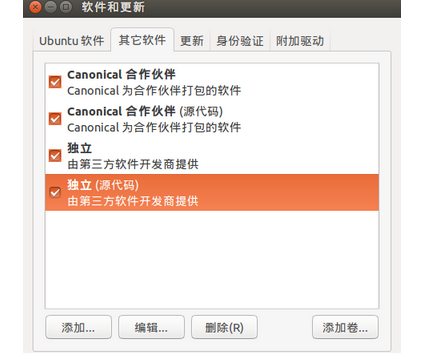
图3
3)更新:这一页面可以自主地选择,默认页面如图4所示:
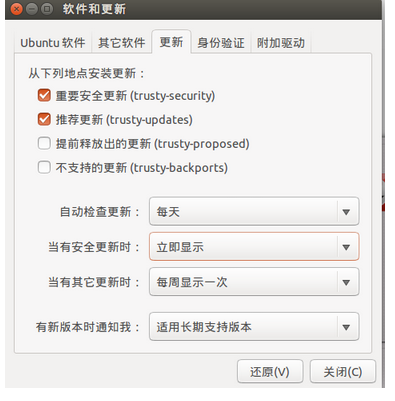
图4
4)身份验证:该页面设置暂且不管。
5)附加驱动:该页面设置也暂且不管。
完成Ubuntu知识库配置后,点击“关闭”保存退出。
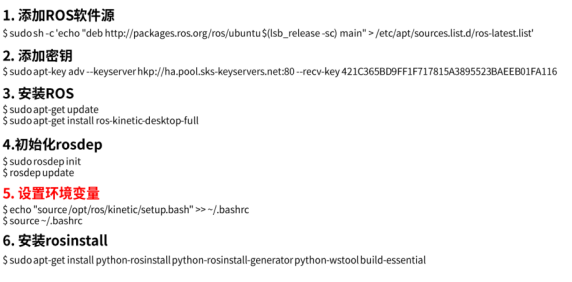
这里我们可以参考官方安装教程,尽量复制代码,不要输入 容易出现输入错误
ros indigo 安装源码如下
1. sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
2.sudo apt-key adv –keyserver hkp://ha.pool.sks-keyservers.net:80 –recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
3. sudo apt-get update
4. sudo apt-get install ros-indigo-desktop-full
5. sudo rosdep init
6. rosdep update
7. echo “source /opt/ros/indigo/setup.bash” >> ~/.bashrc
8. source ~/.bashrc
9. sudo apt-get install python-rosinstall
下图解释安装步骤和代码作用
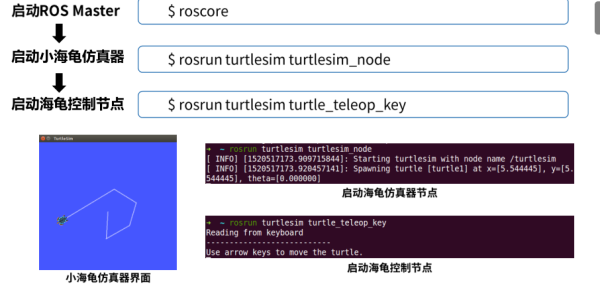
五、测试ros
一般安装好ros后 我们需要测试一下是否安装完整
安装ROS成功后,在Beginner Tutorials中有一个简单的示例程序.
1. 在Terminal中运行以下命令:
$ roscore
2. 新开一个terminal,运行以下命令,打开小乌龟窗口:
$ rosrun turtlesim turtlesim_node
3. 新开一个terminal,运行以下命令,打开乌龟控制窗口,可使用方向键控制乌龟运动:
$ rosrun turtlesim turtle_teleop_key
4. 选中控制窗口,按方向键,可看到小乌龟窗口中乌龟在运动。
5. 新开一个terminal,运行以下命令,可以看到ROS的图形化界面,展示结点的关系:
$ rosrun rqt_graph rqt_graph
6. 至此,测试完成,说明ROS安装没有问题。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/195094.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
