大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
硬件平台:
1主控:SMDK Exynos4412 POP S5M8767A
2 RFID模块:君盾集团提供的RC522模块
3通信接口:SPI
软件平台:Android ICS & kernel version 3.0.15
一,使能主控端SPI
1硬件使能:
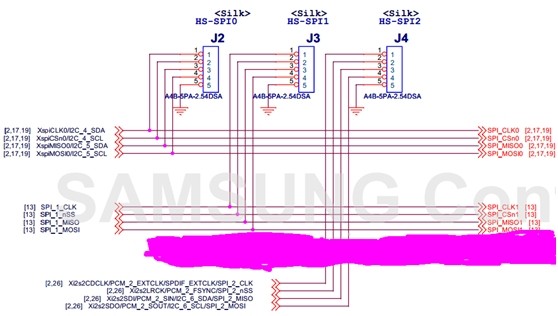
从SMDK原理图上可以看到SPI0与I2C共用,SPI1已经连接到其它设备,SPI2未用,故这里选用SPI2。

2软件使能:
SMDK Exynos4412主控端已经配置好了SPI接口,使用时只需打开宏CONFIG_S3C64XX_DEV_SPI即可。
打开方式:make menuconfigàDevice DriversàSPI supportàSamsung S3C64XX series type SPI.
编译后生成zImage,烧录进开发板。
二,测试主控端SPI
主控端SPI已经打开,接下来可以用一个通用的SPI驱动来测试主控端SPI硬件是否能正常工作。
以模块的方式编译:drivers/spi/spidev.c,生成spidev.ko,便是通用的设备端SPI驱动程序。
编译测试程序:Documentation/spi/spidev_test.c,先修改第32行:static const char *device = “/dev/spidev1.1″的设备为“/dev/spidev2.0”,然后再以应用程序的方式来编译,生成spidev_test,即为对应SPI的测试程序。
通过串口,赋予root权限和系统可读写权限:
shell@android:/ $ su root
shell@android:/ # mount -o remount -rw /system
[391.423930] EXT4-fs (mmcblk0p2): re-mounted. Opts: (null)
shell@android:/ #
通过adb把spidev.ko和spidev_test push到开发板:

加载驱动:
shell@android:/system # insmod spidev.ko
把MISO和MOSI短路,即自发自收,然后再执行测试程序:
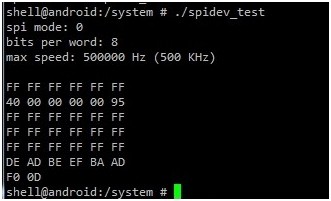
如上图所示,说明能通过SPI收发数据;如果全部显示为0,则说明SPI未正常工作。接下来可以放心地去调试我们的RC522模块了。
三,RC522设备端驱动调试
上面的实验已经证明了主控的SPI可以正常工作,接下来可以正式调试RC522了。――这里假设你的rfid_rc522驱动已经写好,现在只需要去调试――如果驱动没有写好,请看另一篇Blog。
1打开与开发板相关的文件:arch/arm/mach-exynos/mach-smdk4x12.c
由于使用的spi2,故要修改board_info里的modalias = “rfid_rc522”,与驱动里的spi_drviver.name相匹配,否则probe函数不成功。
点击(此处)折叠或打开
988 static struct spi_board_info spi2_board_info[] __initdata = {
989 {
990 .modalias = “rfid_rc522”,
991 .platform_data = NULL,
992 .max_speed_hz = 10*1000*1000,
993 .bus_num = 2,
994 .chip_select = 0,
995 .mode = SPI_MODE_0,
996 .controller_data = &spi2_csi[0],
997 }
998 };
2重新编译内核,并烧录到开发板。
3编译rc522驱动程序,并通过adb usb把生成的rfid_rc522.ko copy到开发板系统的/system目录下,然后insmodrfid_rc522.ko,这样驱动就以模块的形式加载进了内核系统。加载成功后,在/dev目录下就会有rfid_rc522_dev这个目录。

四,应用程序
驱动中的write函数为:
rc522_write (struct file *filp, const char *buf, size_t count, loff_t *f_pos);
用户空间的应用程序write函数为:
write(rc522_fd, bufpw1, sizeof(bufpw1));
二者如何联系的呢?
其实应用程序中的write函数通过调用操作系统中的核心函数sys_write(unsigned int fd, const char * buf, size_t count)来实现,而sys_write()函数又对驱动中的rc522_write()进行了封装。
//摘自论坛开始
下面以字符设备驱动来具体说明:
1,insmod驱动程序。驱动程序申请次设备名和主设备号,这些可以在/proc/devieces中获得。
2,从/proc/devices中获得主设备号,并使用mknod命令建立设备节点文件。这是通过主设备号将设备节点文件和设备驱动程序联系在一起。设备节点文件中的file属性中指明了驱动程序中fops方法实现的函数指针。
3,用户程序使用open打开设备节点文件,这时操作系统内核知道该驱动程序工作了,就调用fops方法中的open函数进行相应的工作。open方法一般返回的是文件标示符,实际上并不是直接对它进行操作的,而是有操作系统的系统调用在背后工作。
4,当用户使用write函数操作设备文件时,操作系统调用sys_write函数,该函数首先通过文件标示符得到设备节点文件对应的inode指针和flip指针。inode指针中有设备号信息,能够告诉操作系统应该使用哪一个设备驱动程序,flip指针中有fops信息,可以告诉操作系统相应的fops方法函数在那里可以找到。
5,然后这时sys_write才会调用驱动程序中的write方法来对设备进行写的操作。
其中1-3都是在用户空间进行的,4-5是在内核空间进行的。用户的write函数和操作系统的write函数通过系统调用sys_write联系在了一起。
注意:
对于块设备来说,还存在写的模式的问题,这应该是由GNU C库来解决的,这里不予讨论,因为我没有看过GNU C库的源代码。
//摘自论坛结束
应用程序源码如下:
点击(此处)折叠或打开
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
static enum IO_CMD {
READ_CARD = 0,
CHANGE_PASSWD = 1,
CHANGE_BLOCK = 3,
SET_RW_TIME = 4,
WRITE_CARD = 5,
};
int main(int argc, char** argv)
{
int rc522_fd;
int i, read_num;
char r[256];
printf(“test: rc522 %s %s\n”, __DATE__, __TIME__);
printf(“test: before open rc522_fd\n”);
rc522_fd = open(“/dev/rfid_rc522_dev”, O_RDWR);
printf(“test: rc522_fd=%d\n”, rc522_fd);
if(rc522_fd == -1)
{
printf(“test: Error Opening rc522\n”);
return(-1);
}
printf(“test: wait 01\n”);
sleep(1); //wait
printf(“test: wait 02\n”);
/******* Never to open ********/
#if 0
// change password as:020202020202
ioctl(rc522_fd, CHANGE_BLOCK, 0);//参数3:选第0块
ioctl(rc522_fd, CHANGE_PASSWD, 0);
char bufpw1[6] = {0xff,0xff,0xff,0xff,0xff,0xff};
write(rc522_fd, bufpw1, sizeof(bufpw1));
#endif
ioctl(rc522_fd, CHANGE_BLOCK, 0);//参数3:选第0块
ioctl(rc522_fd, READ_CARD, 0);//参数3没用
for(i = 0; i < 3; i++) //读三次卡号
{
read_num = read(rc522_fd, r, 0);
printf(“test: i=%d read_num=%d “, i, read_num);
if(read_num > 0){
printf(“r=[0x%.2X]”, r[0]);
}
printf(“\n”);
sleep(1);
}
// write something to the card
ioctl(rc522_fd, CHANGE_BLOCK, 1);//参数3:选第2块
ioctl(rc522_fd, WRITE_CARD, 1);
printf(“before write card!\n”);
char buf[11] = “186653803xx”;
if(write(rc522_fd, buf,sizeof(buf)))
{
printf(“write error\n”);
}
// read block[1], just writed with
ioctl(rc522_fd, CHANGE_BLOCK, 1);//参数3:选第1块
ioctl(rc522_fd, READ_CARD, 0);//参数3没用
read_num = read(rc522_fd, r, 0);
printf(“read block[1]\n\n\n The number you just writed is: %s\n\n\n”, r);
printf(“test: close rc522_fd\n”);
close(rc522_fd);
printf(“test: exit rc522_fd\n”);
return 0;
}
应用程序编译的Makefile如下:
点击(此处)折叠或打开
# Comment/uncomment the following line to disable/enable debugging
#DEBUG = y
DEST_BIN_DIR= drivers/
EXTRA_CFLAGS += -D_V3
#TESTFLAGS = -D_V3
# Add your debugging flag (or not) to CFLAGS
ifeq ($(DEBUG),y)
DEBFLAGS = -O -g -DSCULL_DEBUG # “-O” is needed to expand inlines
else
DEBFLAGS = -O2
endif
EXTRA_CFLAGS += $(DEBFLAGS)
EXTRA_CFLAGS += -I$(LDDINC)
EXTRA_CFLAGS += -DREV_VERSION=$(REV_VERSION)
LDFLAGS += –static
all: test
clean:
rm -rf test_rc522
cp:
cp -f test_rc522 $(DEST_BIN_DIR)
mv:
mv -f test_rc522 $(DEST_BIN_DIR)
test:
arm-linux-gcc $(CFLAGS) $(LDFLAGS) -O2 test_rc522.c -o test_rc522
depend .depend dep:
$(CC) $(CFLAGS) -M *.c > .depend
ifeq (.depend,$(wildcard .depend))
include .depend
endif
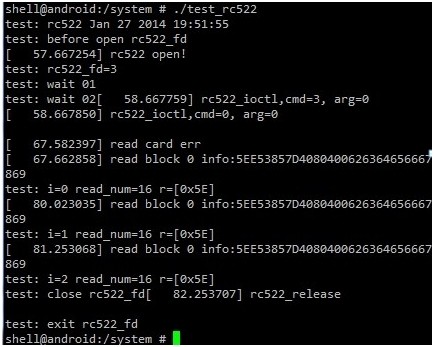
测试时,把卡靠近RC522的天线区域,即可正常读到卡ID。
五,总结
本次调试比较顺利,遇到几个比较大的问题如下:
1 SMDK开发板SPI0通信有问题,开始一直以为驱动的问题,也不知道应该如何测试开发板SPI接口是否OK,在网上找了一些资料后发现SPI驱动可以通过内核自带的驱动模块和应用程序进行测试。
2应用程序(测试程序)无法在开发板系统上运行,原因是链接库未设置成静态。
3 RC522中的VCC供电需要3.3V,MOSI,CLK等TTL高电平也是3.3V。但4412主控的GPIO输出的高电平全部是1.8V,故模块无法正常工作。由于是调试,故不可能加一个TTL电平转换的IC了。后来试着把VCC调低到2.6V,结果模块可以正常工作了。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/193357.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
