大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
文章目录
一.S50(M1)卡介绍
1.S50(M1)卡基础知识
1.每张卡有唯一的序列号,32位
2.卡的容量是8Kbit的EEPROM
3.分为16个扇区,每个扇区分为4块,每块16个字节,以块为存取单位
4.每个扇区都有独立的一组密码和访问控制
2.内部信息
扇区0的块0用来固化厂商代码;
每个扇区的块3作为控制块,存放:密码A(6字节)、存取控制(4字节)、密码B(6字节)
每个扇区的块0、1、2作为数据块,其作用如下:
1.作为一般的数据存储,可以对其中的数据进行读写操作
2.用作数据值,可以进行初始化值、加值、减值、读值操作
3.存取控制
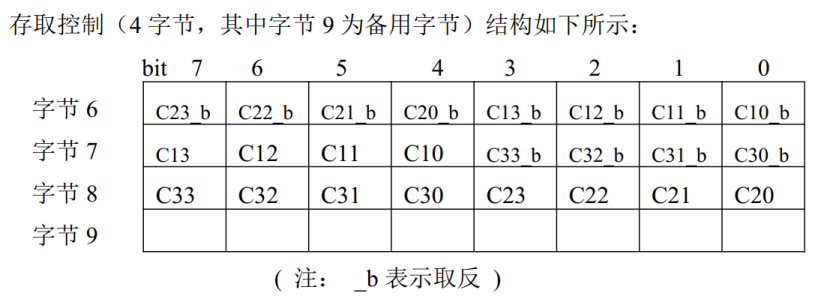
每个扇区的密码和存取控制都是独立的,存取控制是4个字节,即32位(在块3中)。
每个块都有存取条件,存取条件是由密码和存取控制共同决定的。
每个块都有相应的三个控制位,这三个控制位存在于存取控制字节中,相应的控制位决定了该块的访问权限,控制位如图:
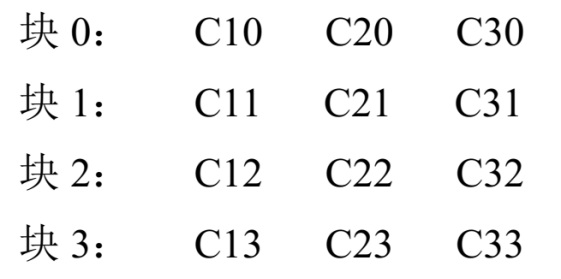

就是说,每个扇区的所有块的存取条件控制位,都放在了该扇区的块3中,如图:
4.数据块的存取控制
对数据块,与就是块0、1、2的存取控制是由对应块的控制位来决定的:
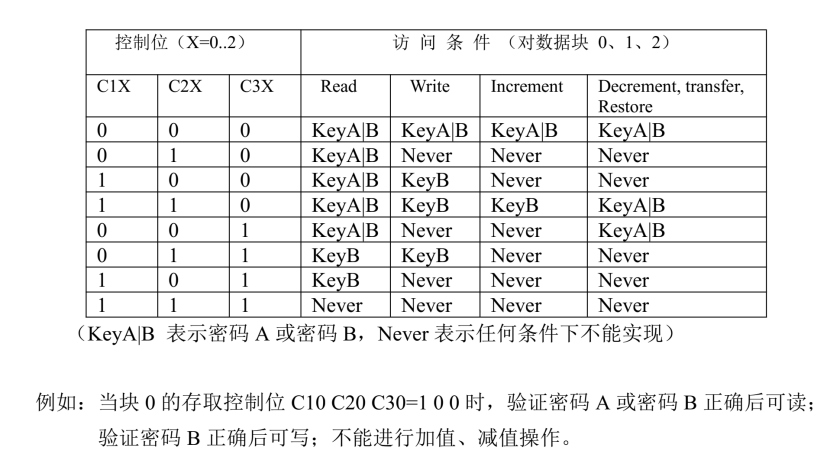
从表中得知:对数据块的存取控制,由于存取控制由三个控制位所决定,所以相应的访问条件就产生了9种。
要想对数据块进行操作,首先要看该数据块的控制位是否允许对数据块的操作,如果允许操作,再看需要验证什么密码,只有验证密码正确后才可以对该数据块执行相应操作。
一般密码A的初始值都是0xFF…
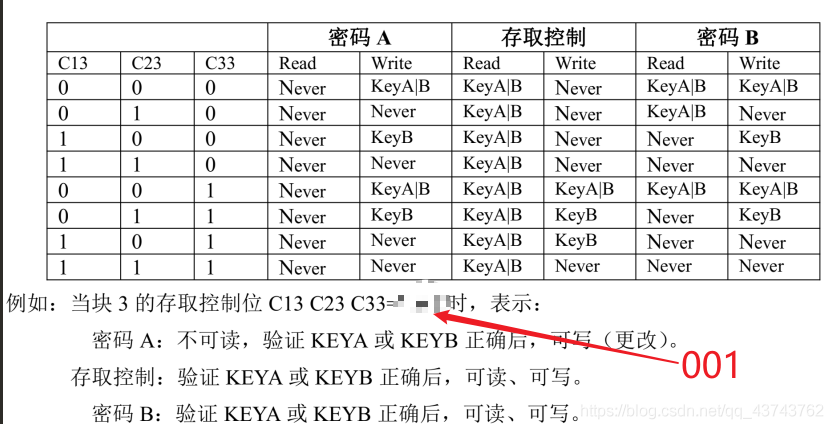
5.控制块的存取控
块3(控制块)的存取操作与数据块不同,如图:
6.工作原理
电气部分:
卡片的电气部分由一个天线和一个ASIC组成。
天线:就是几组绕线的线圈,体积小,已经封装在卡片内
ASIC:ASIC即专用集成电路,是指应特定用户要求和特定电子系统的需要而设计、制造的集成电路。 目前用CPLD(复杂可编程逻辑器件)和 FPGA(现场可编程逻辑阵列)来进行ASIC设计是最为流行的方式之一,它们的共性是都具有用户现场可编程特性,都支持边界扫描技术,但两者在集成度、速度以及编程方式上具有各自的特点,这样理解,ASIC就是卡片特点的一个集成电路。
卡片的ASIC包含了一个高速(106KB)的RF接口、一个控制单元、一个8K的EEPROM
工作过程:
读卡器会向M1卡发送一组固定频率的电磁波,卡片内有一个LC串联谐振电路,其工作频率与读卡器发送的电磁波频率相同,遂在电磁波的激励下,LC串联谐振电路会发生共振,从而使电容内产生电荷,在电容的另一端接有一个单向导电的电子泵,电子泵将产生的电荷转移到另一个电容中存储。当存储电容中的电荷达到2V的时候,此时电容就作为电源为其他电路提供工作电压,所以卡片就可以向读卡器发送数据,或者从读卡器接收数据,实现了读卡器与卡片的通信。
7.M1与读卡器的通信
通信的流程图如示:
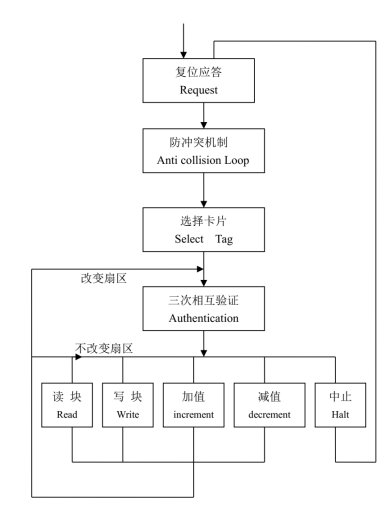
复位应答(Request)
M1卡的通信协议和通信波特率是定义好的,当有卡片进入读卡器的工作范围时,读卡器要以特定的协议与卡片通信,从而确定卡片的卡型。
防冲突机制(Anticollision Loop)
当有多张卡片进入读写器操作范围时,会从中选择一张卡片进行操作,并返回选中卡片的序列号。
选择卡片(Select Tag)
选择被选中的卡的序列号,并同时返回卡的容量代码。
三次相互确认(3 Pass Authentication)
选定要处理的卡片后,读写器就要确定访问的扇区号,并且对扇区密码进行密码校验。在三次互相认证后就可以通过加密流进行通信。每次在选择扇区的时候都要进行扇区的密码校验。
对数据块的操作
读(Read):读一个块的数据;
写(Write):在一个块中写数据;
加(Increment):对数据块中的数值进行加值;
减(Decrement):对数据块中的数值进行减值;
传输(Transfer):将数据寄存器中的内容写入数据块中;
中止(Halt):暂停卡片的工作;
二.RC522工程代码详解
1.RC522与M1通信
用户通过单片机初始化RC522,然后通过单片机控制RC522与M1通信,那单片机是怎样与RC522通信的呢?
RC522通过SPI接口与单片机(STM32)通信,单片机向RC522内的寄存器写入特定的指令,RC522会根据寄存器中的值来执行相关操作,并与M1通信。所以要控制RC522,就必须了解RC522的寄存器和一些相关指令,这些东西厂家都会提供,所以我们只需要复制粘贴到我们的工程中使用即可。下面分享一下相关寄存器的地址和指令:
/
//RC522命令字
/
#define PCD_IDLE 0x00 //取消当前命令
#define PCD_AUTHENT 0x0E //验证密钥
#define PCD_RECEIVE 0x08 //接收数据
#define PCD_TRANSMIT 0x04 //发送数据
#define PCD_TRANSCEIVE 0x0C //发送并接收数据
#define PCD_RESETPHASE 0x0F //复位
#define PCD_CALCCRC 0x03 //CRC计算
/
//Mifare_One卡片命令字
/
#define PICC_REQIDL 0x26 //寻天线区内未进入休眠状态
#define PICC_REQALL 0x52 //寻天线区内全部卡
#define PICC_ANTICOLL1 0x93 //防冲撞
#define PICC_ANTICOLL2 0x95 //防冲撞
#define PICC_AUTHENT1A 0x60 //验证A密钥
#define PICC_AUTHENT1B 0x61 //验证B密钥
#define PICC_READ 0x30 //读块
#define PICC_WRITE 0xA0 //写块
#define PICC_DECREMENT 0xC0 //扣款
#define PICC_INCREMENT 0xC1 //充值
#define PICC_RESTORE 0xC2 //调块数据到缓冲区
#define PICC_TRANSFER 0xB0 //保存缓冲区中数据
#define PICC_HALT 0x50 //休眠
/* RC522 FIFO长度定义 */
#define DEF_FIFO_LENGTH 64 //FIFO size=64byte
#define MAXRLEN 18
/* RC522寄存器定义 */
// PAGE 0
#define RFU00 0x00 //保留
#define CommandReg 0x01 //启动和停止命令的执行
#define ComIEnReg 0x02 //中断请求传递的使能(Enable/Disable)
#define DivlEnReg 0x03 //中断请求传递的使能
#define ComIrqReg 0x04 //包含中断请求标志
#define DivIrqReg 0x05 //包含中断请求标志
#define ErrorReg 0x06 //错误标志,指示执行的上个命令的错误状态
#define Status1Reg 0x07 //包含通信的状态标识
#define Status2Reg 0x08 //包含接收器和发送器的状态标志
#define FIFODataReg 0x09 //64字节FIFO缓冲区的输入和输出
#define FIFOLevelReg 0x0A //指示FIFO中存储的字节数
#define WaterLevelReg 0x0B //定义FIFO下溢和上溢报警的FIFO深度
#define ControlReg 0x0C //不同的控制寄存器
#define BitFramingReg 0x0D //面向位的帧的调节
#define CollReg 0x0E //RF接口上检测到的第一个位冲突的位的位置
#define RFU0F 0x0F //保留
// PAGE 1
#define RFU10 0x10 //保留
#define ModeReg 0x11 //定义发送和接收的常用模式
#define TxModeReg 0x12 //定义发送过程的数据传输速率
#define RxModeReg 0x13 //定义接收过程中的数据传输速率
#define TxControlReg 0x14 //控制天线驱动器管教TX1和TX2的逻辑特性
#define TxAutoReg 0x15 //控制天线驱动器的设置
#define TxSelReg 0x16 //选择天线驱动器的内部源
#define RxSelReg 0x17 //选择内部的接收器设置
#define RxThresholdReg 0x18 //选择位译码器的阈值
#define DemodReg 0x19 //定义解调器的设置
#define RFU1A 0x1A //保留
#define RFU1B 0x1B //保留
#define MifareReg 0x1C //控制ISO 14443/MIFARE模式中106kbit/s的通信
#define RFU1D 0x1D //保留
#define RFU1E 0x1E //保留
#define SerialSpeedReg 0x1F //选择串行UART接口的速率
// PAGE 2
#define RFU20 0x20 //保留
#define CRCResultRegM 0x21 //显示CRC计算的实际MSB值
#define CRCResultRegL 0x22 //显示CRC计算的实际LSB值
#define RFU23 0x23 //保留
#define ModWidthReg 0x24 //控制ModWidth的设置
#define RFU25 0x25 //保留
#define RFCfgReg 0x26 //配置接收器增益
#define GsNReg 0x27 //选择天线驱动器管脚(TX1和TX2)的调制电导
#define CWGsCfgReg 0x28 //选择天线驱动器管脚的调制电导
#define ModGsCfgReg 0x29 //选择天线驱动器管脚的调制电导
#define TModeReg 0x2A //定义内部定时器的设置
#define TPrescalerReg 0x2B //定义内部定时器的设置
#define TReloadRegH 0x2C //描述16位长的定时器重装值
#define TReloadRegL 0x2D //描述16位长的定时器重装值
#define TCounterValueRegH 0x2E
#define TCounterValueRegL 0x2F //显示16位长的实际定时器值
// PAGE 3
#define RFU30 0x30 //保留
#define TestSel1Reg 0x31 //常用测试信号配置
#define TestSel2Reg 0x32 //常用测试信号配置和PRBS控制
#define TestPinEnReg 0x33 //D1-D7输出驱动器的使能管脚(仅用于串行接口)
#define TestPinValueReg 0x34 //定义D1-D7用作I/O总线时的值
#define TestBusReg 0x35 //显示内部测试总线的状态
#define AutoTestReg 0x36 //控制数字自测试
#define VersionReg 0x37 //显示版本
#define AnalogTestReg 0x38 //控制管脚AUX1和AUX2
#define TestDAC1Reg 0x39 //定义TestDAC1的测试值
#define TestDAC2Reg 0x3A //定义TestDAC2的测试值
#define TestADCReg 0x3B //显示ADCI和Q通道的实际值
#define RFU3C 0x3C //保留
#define RFU3D 0x3D //保留
#define RFU3E 0x3E //保留
#define RFU3F 0x3F //保留
/* 和RC522通信时返回的错误代码 */
#define MI_OK 0x26
#define MI_NOTAGERR 0xcc
#define MI_ERR 0xbb
既然RC522是通过SPI与单片机通信的,所以就会有相应的引脚配置,下面给出相关引脚的配置和一些引脚操作宏定义:
/* RC522引脚连接说明(SPI1的引脚) : CS:PA4( 接的SDA引脚 ) SCK:PA5 MISO:PA6 MOSI:PA7 RST:PB0 */
void RC522_GPIO_Init( void )
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB, ENABLE );
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_Init( GPIOA, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_Init( GPIOA, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_Init( GPIOA, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_Init( GPIOB, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_Init( GPIOA, &GPIO_InitStructure );
}
/* IO口操作函数 */
#define RC522_CS_Enable() GPIO_ResetBits ( GPIOA, GPIO_Pin_4 )
#define RC522_CS_Disable() GPIO_SetBits ( GPIOA, GPIO_Pin_4 )
#define RC522_Reset_Enable() GPIO_ResetBits( GPIOB, GPIO_Pin_0 )
#define RC522_Reset_Disable() GPIO_SetBits( GPIOB, GPIO_Pin_0 )
#define RC522_SCK_0() GPIO_ResetBits( GPIOA, GPIO_Pin_5 )
#define RC522_SCK_1() GPIO_SetBits( GPIOA, GPIO_Pin_5 )
#define RC522_MOSI_0() GPIO_ResetBits( GPIOA, GPIO_Pin_7 )
#define RC522_MOSI_1() GPIO_SetBits( GPIOA, GPIO_Pin_7 )
#define RC522_MISO_GET() GPIO_ReadInputDataBit( GPIOA, GPIO_Pin_6 )
我是通过软件模拟SPI与RC522通信的,SPI发送接收字节的代码如下(高位先行):
/* 软件模拟SPI发送一个字节数据,高位先行 */
void RC522_SPI_SendByte( uint8_t byte )
{
uint8_t n;
for( n=0;n<8;n++ )
{
if( byte&0x80 )
RC522_MOSI_1();
else
RC522_MOSI_0();
Delay_us(200);
RC522_SCK_0();
Delay_us(200);
RC522_SCK_1();
Delay_us(200);
byte<<=1;
}
}
/* 软件模拟SPI读取一个字节数据,先读高位 */
uint8_t RC522_SPI_ReadByte( void )
{
uint8_t n,data;
for( n=0;n<8;n++ )
{
data<<=1;
RC522_SCK_0();
Delay_us(200);
if( RC522_MISO_GET()==1 )
data|=0x01;
Delay_us(200);
RC522_SCK_1();
Delay_us(200);
}
return data;
}
单片机和RC522之间的通信基础机制就建立起来了,下一步就是建立在通信基础上的操作了。
2.STM32对RC522寄存器的操作
上面说了,单片机是向RC522的寄存器操作来驱动RC522的,所以会有这几种基本操作:
- 读取RC522指定寄存器的值
- 向RC522指定寄存器中写入指定的数据
- 置位RC522指定寄存器的指定位
- 清位RC522指定寄存器的指定位
下面给出这些操作的函数实现:
/** * @brief :读取RC522指定寄存器的值 * @param :Address:寄存器的地址 * @retval :寄存器的值 */
uint8_t RC522_Read_Register( uint8_t Address )
{
uint8_t data,Addr;
Addr = ( (Address<<1)&0x7E )|0x80;
RC522_CS_Enable();
RC522_SPI_SendByte( Addr );
data = RC522_SPI_ReadByte();//读取寄存器中的值
RC522_CS_Disable();
return data;
}
/** * @brief :向RC522指定寄存器中写入指定的数据 * @param :Address:寄存器地址 data:要写入寄存器的数据 * @retval :无 */
void RC522_Write_Register( uint8_t Address, uint8_t data )
{
uint8_t Addr;
Addr = ( Address<<1 )&0x7E;
RC522_CS_Enable();
RC522_SPI_SendByte( Addr );
RC522_SPI_SendByte( data );
RC522_CS_Disable();
}
/** * @brief :置位RC522指定寄存器的指定位 * @param :Address:寄存器地址 mask:置位值 * @retval :无 */
void RC522_SetBit_Register( uint8_t Address, uint8_t mask )
{
uint8_t temp;
/* 获取寄存器当前值 */
temp = RC522_Read_Register( Address );
/* 对指定位进行置位操作后,再将值写入寄存器 */
RC522_Write_Register( Address, temp|mask );
}
/** * @brief :清位RC522指定寄存器的指定位 * @param :Address:寄存器地址 mask:清位值 * @retval :无 */
void RC522_ClearBit_Register( uint8_t Address, uint8_t mask )
{
uint8_t temp;
/* 获取寄存器当前值 */
temp = RC522_Read_Register( Address );
/* 对指定位进行清位操作后,再将值写入寄存器 */
RC522_Write_Register( Address, temp&(~mask) );
}
知道了对RC522寄存器的操作,就可以结合相关的指令,对RC522写入指令控制RC522了,下面接收一下RC522的基本操作。
3.STM32对RC522的基础通信
上面说了寄存器、指令、对寄存器的操作,这里介绍一些对RC522的基本操作,包括:
- 开启天线
- 关闭天线
- 复位RC522
- 设置RC522工作方式
RC522与M1通信前必须开启天线,进行复位,然后设置RC522的工作方式!下面介绍一下相关代码:
/** * @brief :开启天线 * @param :无 * @retval :无 */
void RC522_Antenna_On( void )
{
uint8_t k;
k = RC522_Read_Register( TxControlReg );
/* 判断天线是否开启 */
if( !( k&0x03 ) )
RC522_SetBit_Register( TxControlReg, 0x03 );
}
/** * @brief :关闭天线 * @param :无 * @retval :无 */
void RC522_Antenna_Off( void )
{
/* 直接对相应位清零 */
RC522_ClearBit_Register( TxControlReg, 0x03 );
}
/** * @brief :复位RC522 * @param :无 * @retval :无 */
void RC522_Rese( void )
{
RC522_Reset_Disable();
Delay_us ( 1 );
RC522_Reset_Enable();
Delay_us ( 1 );
RC522_Reset_Disable();
Delay_us ( 1 );
RC522_Write_Register( CommandReg, 0x0F );
while( RC522_Read_Register( CommandReg )&0x10 )
;
/* 缓冲一下 */
Delay_us ( 1 );
RC522_Write_Register( ModeReg, 0x3D ); //定义发送和接收常用模式
RC522_Write_Register( TReloadRegL, 30 ); //16位定时器低位
RC522_Write_Register( TReloadRegH, 0 ); //16位定时器高位
RC522_Write_Register( TModeReg, 0x8D ); //内部定时器的设置
RC522_Write_Register( TPrescalerReg, 0x3E ); //设置定时器分频系数
RC522_Write_Register( TxAutoReg, 0x40 ); //调制发送信号为100%ASK
}
/** * @brief :设置RC522的工作方式 * @param :Type:工作方式 * @retval :无 M500PcdConfigISOType */
void RC522_Config_Type( char Type )
{
if( Type=='A' )
{
RC522_ClearBit_Register( Status2Reg, 0x08 );
RC522_Write_Register( ModeReg, 0x3D );
RC522_Write_Register( RxSelReg, 0x86 );
RC522_Write_Register( RFCfgReg, 0x7F );
RC522_Write_Register( TReloadRegL, 30 );
RC522_Write_Register( TReloadRegH, 0 );
RC522_Write_Register( TModeReg, 0x8D );
RC522_Write_Register( TPrescalerReg, 0x3E );
Delay_us(2);
/* 开天线 */
RC522_Antenna_On();
}
}
对于这些寄存器和指令的宏定义,查一下前面的说明即可。
4.STM32控制RC522与M1的通信
这部分是最重要的步骤,RC522与M1的通信是工程要实现的目的,而且要遵守前面提到的M1卡与RC522通信的步骤以及M1卡的内部构造,包括以下操作:
- 通过RC522和M1卡通讯(数据的双向传输)
- 寻卡
- 防冲突
- 用RC522计算CRC16(循环冗余校验)
- 选定卡片
- 校验卡片密码
- 在M1卡的指定块地址写入指定数据
- 读取M1卡的指定块地址的数据
- 让卡片进入休眠模式
话不多说,上代码,代码中都有按照我理解的一些注释:
/** * @brief :通过RC522和ISO14443卡通讯 * @param :ucCommand:RC522命令字 * pInData:通过RC522发送到卡片的数据 * ucInLenByte:发送数据的字节长度 * pOutData:接收到的卡片返回数据 * pOutLenBit:返回数据的位长度 * @retval :状态值MI_OK,成功 */
char PcdComMF522 ( uint8_t ucCommand, uint8_t * pInData, uint8_t ucInLenByte, uint8_t * pOutData, uint32_t * pOutLenBit )
{
char cStatus = MI_ERR;
uint8_t ucIrqEn = 0x00;
uint8_t ucWaitFor = 0x00;
uint8_t ucLastBits;
uint8_t ucN;
uint32_t ul;
switch ( ucCommand )
{
case PCD_AUTHENT: //Mifare认证
ucIrqEn = 0x12; //允许错误中断请求ErrIEn 允许空闲中断IdleIEn
ucWaitFor = 0x10; //认证寻卡等待时候 查询空闲中断标志位
break;
case PCD_TRANSCEIVE: //接收发送 发送接收
ucIrqEn = 0x77; //允许TxIEn RxIEn IdleIEn LoAlertIEn ErrIEn TimerIEn
ucWaitFor = 0x30; //寻卡等待时候 查询接收中断标志位与 空闲中断标志位
break;
default:
break;
}
RC522_Write_Register ( ComIEnReg, ucIrqEn | 0x80 ); //IRqInv置位管脚IRQ与Status1Reg的IRq位的值相反
RC522_ClearBit_Register ( ComIrqReg, 0x80 ); //Set1该位清零时,CommIRqReg的屏蔽位清零
RC522_Write_Register ( CommandReg, PCD_IDLE ); //写空闲命令
RC522_SetBit_Register ( FIFOLevelReg, 0x80 ); //置位FlushBuffer清除内部FIFO的读和写指针以及ErrReg的BufferOvfl标志位被清除
for ( ul = 0; ul < ucInLenByte; ul ++ )
RC522_Write_Register ( FIFODataReg, pInData [ ul ] ); //写数据进FIFOdata
RC522_Write_Register ( CommandReg, ucCommand ); //写命令
if ( ucCommand == PCD_TRANSCEIVE )
RC522_SetBit_Register(BitFramingReg,0x80); //StartSend置位启动数据发送 该位与收发命令使用时才有效
ul = 1000;//根据时钟频率调整,操作M1卡最大等待时间25ms
do //认证 与寻卡等待时间
{
ucN = RC522_Read_Register ( ComIrqReg ); //查询事件中断
ul --;
} while ( ( ul != 0 ) && ( ! ( ucN & 0x01 ) ) && ( ! ( ucN & ucWaitFor ) ) ); //退出条件i=0,定时器中断,与写空闲命令
RC522_ClearBit_Register ( BitFramingReg, 0x80 ); //清理允许StartSend位
if ( ul != 0 )
{
if ( ! ( RC522_Read_Register ( ErrorReg ) & 0x1B ) ) //读错误标志寄存器BufferOfI CollErr ParityErr ProtocolErr
{
cStatus = MI_OK;
if ( ucN & ucIrqEn & 0x01 ) //是否发生定时器中断
cStatus = MI_NOTAGERR;
if ( ucCommand == PCD_TRANSCEIVE )
{
ucN = RC522_Read_Register ( FIFOLevelReg ); //读FIFO中保存的字节数
ucLastBits = RC522_Read_Register ( ControlReg ) & 0x07; //最后接收到得字节的有效位数
if ( ucLastBits )
* pOutLenBit = ( ucN - 1 ) * 8 + ucLastBits; //N个字节数减去1(最后一个字节)+最后一位的位数 读取到的数据总位数
else
* pOutLenBit = ucN * 8; //最后接收到的字节整个字节有效
if ( ucN == 0 )
ucN = 1;
if ( ucN > MAXRLEN )
ucN = MAXRLEN;
for ( ul = 0; ul < ucN; ul ++ )
pOutData [ ul ] = RC522_Read_Register ( FIFODataReg );
}
}
else
cStatus = MI_ERR;
}
RC522_SetBit_Register ( ControlReg, 0x80 ); // stop timer now
RC522_Write_Register ( CommandReg, PCD_IDLE );
return cStatus;
}
/** * @brief :寻卡 * @param ucReq_code,寻卡方式 * = 0x52:寻感应区内所有符合14443A标准的卡 * = 0x26:寻未进入休眠状态的卡 * pTagType,卡片类型代码 * = 0x4400:Mifare_UltraLight * = 0x0400:Mifare_One(S50) * = 0x0200:Mifare_One(S70) * = 0x0800:Mifare_Pro(X)) * = 0x4403:Mifare_DESFire * @retval :状态值MI_OK,成功 */
char PcdRequest ( uint8_t ucReq_code, uint8_t * pTagType )
{
char cStatus;
uint8_t ucComMF522Buf [ MAXRLEN ];
uint32_t ulLen;
RC522_ClearBit_Register ( Status2Reg, 0x08 ); //清理指示MIFARECyptol单元接通以及所有卡的数据通信被加密的情况
RC522_Write_Register ( BitFramingReg, 0x07 ); // 发送的最后一个字节的 七位
RC522_SetBit_Register ( TxControlReg, 0x03 ); //TX1,TX2管脚的输出信号传递经发送调制的13.56的能量载波信号
ucComMF522Buf [ 0 ] = ucReq_code; //存入寻卡方式
/* PCD_TRANSCEIVE:发送并接收数据的命令,RC522向卡片发送寻卡命令,卡片返回卡的型号代码到ucComMF522Buf中 */
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 1, ucComMF522Buf, & ulLen ); //寻卡
if ( ( cStatus == MI_OK ) && ( ulLen == 0x10 ) ) //寻卡成功返回卡类型
{
/* 接收卡片的型号代码 */
* pTagType = ucComMF522Buf [ 0 ];
* ( pTagType + 1 ) = ucComMF522Buf [ 1 ];
}
else
cStatus = MI_ERR;
return cStatus;
}
/** * @brief :防冲突 * @param :Snr:卡片序列,4字节,会返回选中卡片的序列 * @retval :状态值MI_OK,成功 */
char PcdAnticoll ( uint8_t * pSnr )
{
char cStatus;
uint8_t uc, ucSnr_check = 0;
uint8_t ucComMF522Buf [ MAXRLEN ];
uint32_t ulLen;
RC522_ClearBit_Register ( Status2Reg, 0x08 ); //清MFCryptol On位 只有成功执行MFAuthent命令后,该位才能置位
RC522_Write_Register ( BitFramingReg, 0x00); //清理寄存器 停止收发
RC522_ClearBit_Register ( CollReg, 0x80 ); //清ValuesAfterColl所有接收的位在冲突后被清除
ucComMF522Buf [ 0 ] = 0x93; //卡片防冲突命令
ucComMF522Buf [ 1 ] = 0x20;
/* 将卡片防冲突命令通过RC522传到卡片中,返回的是被选中卡片的序列 */
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 2, ucComMF522Buf, & ulLen);//与卡片通信
if ( cStatus == MI_OK) //通信成功
{
for ( uc = 0; uc < 4; uc ++ )
{
* ( pSnr + uc ) = ucComMF522Buf [ uc ]; //读出UID
ucSnr_check ^= ucComMF522Buf [ uc ];
}
if ( ucSnr_check != ucComMF522Buf [ uc ] )
cStatus = MI_ERR;
}
RC522_SetBit_Register ( CollReg, 0x80 );
return cStatus;
}
/** * @brief :用RC522计算CRC16(循环冗余校验) * @param :pIndata:计算CRC16的数组 * ucLen:计算CRC16的数组字节长度 * pOutData:存放计算结果存放的首地址 * @retval :状态值MI_OK,成功 */
void CalulateCRC ( uint8_t * pIndata, u8 ucLen, uint8_t * pOutData )
{
uint8_t uc, ucN;
RC522_ClearBit_Register(DivIrqReg,0x04);
RC522_Write_Register(CommandReg,PCD_IDLE);
RC522_SetBit_Register(FIFOLevelReg,0x80);
for ( uc = 0; uc < ucLen; uc ++)
RC522_Write_Register ( FIFODataReg, * ( pIndata + uc ) );
RC522_Write_Register ( CommandReg, PCD_CALCCRC );
uc = 0xFF;
do
{
ucN = RC522_Read_Register ( DivIrqReg );
uc --;
} while ( ( uc != 0 ) && ! ( ucN & 0x04 ) );
pOutData [ 0 ] = RC522_Read_Register ( CRCResultRegL );
pOutData [ 1 ] = RC522_Read_Register ( CRCResultRegM );
}
/** * @brief :选定卡片 * @param :pSnr:卡片序列号,4字节 * @retval :状态值MI_OK,成功 */
char PcdSelect ( uint8_t * pSnr )
{
char ucN;
uint8_t uc;
uint8_t ucComMF522Buf [ MAXRLEN ];
uint32_t ulLen;
/* PICC_ANTICOLL1:防冲突命令 */
ucComMF522Buf [ 0 ] = PICC_ANTICOLL1;
ucComMF522Buf [ 1 ] = 0x70;
ucComMF522Buf [ 6 ] = 0;
for ( uc = 0; uc < 4; uc ++ )
{
ucComMF522Buf [ uc + 2 ] = * ( pSnr + uc );
ucComMF522Buf [ 6 ] ^= * ( pSnr + uc );
}
CalulateCRC ( ucComMF522Buf, 7, & ucComMF522Buf [ 7 ] );
RC522_ClearBit_Register ( Status2Reg, 0x08 );
ucN = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 9, ucComMF522Buf, & ulLen );
if ( ( ucN == MI_OK ) && ( ulLen == 0x18 ) )
ucN = MI_OK;
else
ucN = MI_ERR;
return ucN;
}
/** * @brief :校验卡片密码 * @param :ucAuth_mode:密码验证模式 * = 0x60,验证A密钥 * = 0x61,验证B密钥 * ucAddr:块地址 * pKey:密码 * pSnr:卡片序列号,4字节 * @retval :状态值MI_OK,成功 */
char PcdAuthState ( uint8_t ucAuth_mode, uint8_t ucAddr, uint8_t * pKey, uint8_t * pSnr )
{
char cStatus;
uint8_t uc, ucComMF522Buf [ MAXRLEN ];
uint32_t ulLen;
ucComMF522Buf [ 0 ] = ucAuth_mode;
ucComMF522Buf [ 1 ] = ucAddr;
/* 前俩字节存储验证模式和块地址,2~8字节存储密码(6个字节),8~14字节存储序列号 */
for ( uc = 0; uc < 6; uc ++ )
ucComMF522Buf [ uc + 2 ] = * ( pKey + uc );
for ( uc = 0; uc < 6; uc ++ )
ucComMF522Buf [ uc + 8 ] = * ( pSnr + uc );
/* 进行冗余校验,14~16俩个字节存储校验结果 */
cStatus = PcdComMF522 ( PCD_AUTHENT, ucComMF522Buf, 12, ucComMF522Buf, & ulLen );
/* 判断验证是否成功 */
if ( ( cStatus != MI_OK ) || ( ! ( RC522_Read_Register ( Status2Reg ) & 0x08 ) ) )
cStatus = MI_ERR;
return cStatus;
}
/** * @brief :在M1卡的指定块地址写入指定数据 * @param :ucAddr:块地址 * pData:写入的数据,16字节 * @retval :状态值MI_OK,成功 */
char PcdWrite ( uint8_t ucAddr, uint8_t * pData )
{
char cStatus;
uint8_t uc, ucComMF522Buf [ MAXRLEN ];
uint32_t ulLen;
ucComMF522Buf [ 0 ] = PICC_WRITE;//写块命令
ucComMF522Buf [ 1 ] = ucAddr;//写块地址
/* 进行循环冗余校验,将结果存储在& ucComMF522Buf [ 2 ] */
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
/* PCD_TRANSCEIVE:发送并接收数据命令,通过RC522向卡片发送写块命令 */
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
/* 通过卡片返回的信息判断,RC522是否与卡片正常通信 */
if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) || ( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )
cStatus = MI_ERR;
if ( cStatus == MI_OK )
{
//memcpy(ucComMF522Buf, pData, 16);
/* 将要写入的16字节的数据,传入ucComMF522Buf数组中 */
for ( uc = 0; uc < 16; uc ++ )
ucComMF522Buf [ uc ] = * ( pData + uc );
/* 冗余校验 */
CalulateCRC ( ucComMF522Buf, 16, & ucComMF522Buf [ 16 ] );
/* 通过RC522,将16字节数据包括2字节校验结果写入卡片中 */
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 18, ucComMF522Buf, & ulLen );
/* 判断写地址是否成功 */
if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) || ( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )
cStatus = MI_ERR;
}
return cStatus;
}
/** * @brief :读取M1卡的指定块地址的数据 * @param :ucAddr:块地址 * pData:读出的数据,16字节 * @retval :状态值MI_OK,成功 */
char PcdRead ( uint8_t ucAddr, uint8_t * pData )
{
char cStatus;
uint8_t uc, ucComMF522Buf [ MAXRLEN ];
uint32_t ulLen;
ucComMF522Buf [ 0 ] = PICC_READ;
ucComMF522Buf [ 1 ] = ucAddr;
/* 冗余校验 */
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
/* 通过RC522将命令传给卡片 */
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
/* 如果传输正常,将读取到的数据传入pData中 */
if ( ( cStatus == MI_OK ) && ( ulLen == 0x90 ) )
{
for ( uc = 0; uc < 16; uc ++ )
* ( pData + uc ) = ucComMF522Buf [ uc ];
}
else
cStatus = MI_ERR;
return cStatus;
}
/** * @brief :让卡片进入休眠模式 * @param :无 * @retval :状态值MI_OK,成功 */
char PcdHalt( void )
{
uint8_t ucComMF522Buf [ MAXRLEN ];
uint32_t ulLen;
ucComMF522Buf [ 0 ] = PICC_HALT;
ucComMF522Buf [ 1 ] = 0;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
return MI_OK;
}
详情请看代码。
5.测试函数
通过测试函数来试一下对M1卡的识别,读取数据等。
在这里插入代码片char cStr [ 30 ];
/* 卡的ID存储,32位,4字节 */
u8 ucArray_ID [ 4 ];
/** * @brief : 测试代码,读取卡片ID * @param :无 * @retval :无 */
void IC_test ( void )
{
uint8_t ucStatusReturn; //返回状态
while ( 1 )
{
/* 寻卡(方式:范围内全部),第一次寻卡失败后再进行一次,寻卡成功时卡片序列传入数组ucArray_ID中 */
if ( ( ucStatusReturn = PcdRequest ( PICC_REQALL, ucArray_ID ) ) != MI_OK )
ucStatusReturn = PcdRequest ( PICC_REQALL, ucArray_ID );
if ( ucStatusReturn == MI_OK )
{
/* 防冲突操作,被选中的卡片序列传入数组ucArray_ID中 */
if ( PcdAnticoll ( ucArray_ID ) == MI_OK )
{
sprintf ( cStr, "The Card ID is: %02X%02X%02X%02X", ucArray_ID [ 0 ], ucArray_ID [ 1 ], ucArray_ID [ 2 ], ucArray_ID [ 3 ] );
printf ("%s\r\n",cStr );
}
}
}
}
代码亲测可以用,有什么疑问可以多交流。
q:2723808286
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/191674.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
