大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
原文地址:https://www.yiboard.com/thread-1567-1-1.html
使用433MHz RF模块制作一艘简易的Arduino遥控小船
https://www.yiboard.com/forum.php?mod=viewthread&tid=1567&fromuid=2110
本篇文章中,我们将制作一个远程控制的Arduino小船,可以使用433 MHz RF无线模块进行控制。我们将制作自己的433MHz发射器和接收器模块,使用自制遥控器来控制这艘小船。对于远程控制的设备或两个设备之间的通信,我们有很多选择,例如IR、蓝牙、互联网、RF等。与IR通信相比,无线射频通信具有一些优势,例如范围更广,并且不需要在发射器和接收器之间建立视线连接。同样,这些模块可以执行两种通信方式,这意味着它可以同时发送和接收。因此,让我们使用此433MHz RF模块,开始制作一艘小船。
所需的组件
● 433MHz发射器和接收器
● Arduino开发板
● HT12E和HT12D
● 按钮-4个
● 电阻
● L293d电机驱动器
● 9V电池
● 7805调节器
● 直流电动机
● 叶片
● 1uf电容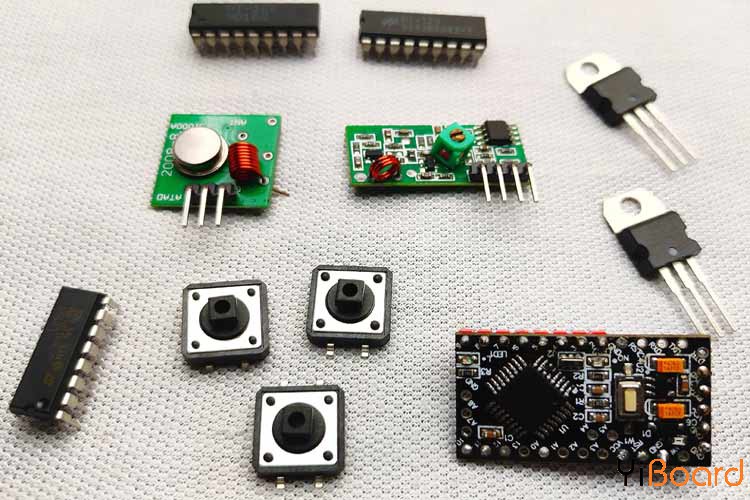
 433MHz射频发送器和接收器模块[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-PWuHQrsk-1620703376506)(C:/Users/Administrator/Pictures/typora/105815bpl5wlcp2jmmdedc.jpg)]这些类型的RF模块在创客中非常受欢迎。由于其成本低廉且连接简单。这些模块最适合所有形式的短距离通信项目。这些模块是ASK(幅移键控)类型的RF模块,幅移键控(ASK)是幅度调制的一种形式,它将数字数据表示为载波幅度的变化。在ASK系统中,二进制符号1通过在T秒的比特持续时间内发送固定幅度的载波和固定频率来表示。如果信号值为1,则将发送载波信号;否则,将发送信号值0。这意味着当发送逻辑”零”时,它们通常不消耗功率。这种低功耗使其在电池供电的项目中非常有用。
433MHz射频发送器和接收器模块[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-PWuHQrsk-1620703376506)(C:/Users/Administrator/Pictures/typora/105815bpl5wlcp2jmmdedc.jpg)]这些类型的RF模块在创客中非常受欢迎。由于其成本低廉且连接简单。这些模块最适合所有形式的短距离通信项目。这些模块是ASK(幅移键控)类型的RF模块,幅移键控(ASK)是幅度调制的一种形式,它将数字数据表示为载波幅度的变化。在ASK系统中,二进制符号1通过在T秒的比特持续时间内发送固定幅度的载波和固定频率来表示。如果信号值为1,则将发送载波信号;否则,将发送信号值0。这意味着当发送逻辑”零”时,它们通常不消耗功率。这种低功耗使其在电池供电的项目中非常有用。
433MHZ射频发射器这种类型的模块非常小,有3个引脚:VCC、地和数据。还有一些模块带有额外的天线引脚。发射器模块的工作电压为3V-12V,该模块没有任何可调组件。该模块的主要优点之一是低电流消耗,它几乎需要零电流来发送位零。
Arduino遥控小船发射器功能框图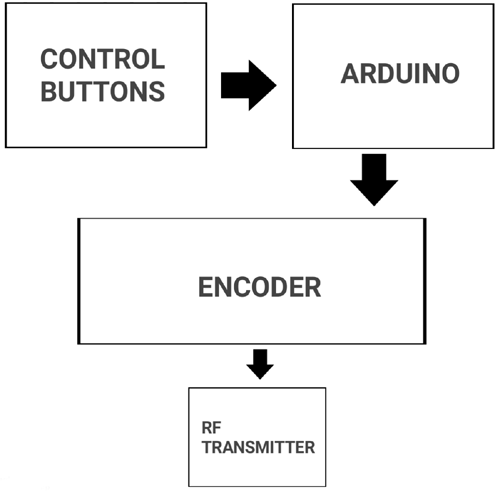
在上面的框图中,有四个按钮(控制按钮),这些按钮用于控制船的方向。分别是前进、后退、左和右。通过按钮,我们获得了控制船只的逻辑,但无法直接连接到编码器,这就是我们使用Arduino的原因。您可能会想为什么在这里使用Arduino,这仅仅是因为我们需要同时下拉编码器的两个并行数据输入,才能实现向前和向后移动,而仅通过按钮就无法实现。然后,编码器将到来的并行数据编码为串行输出。然后,我们可以借助RF发送器发送该串行数据。
Arduino遥控小船发射器的电路图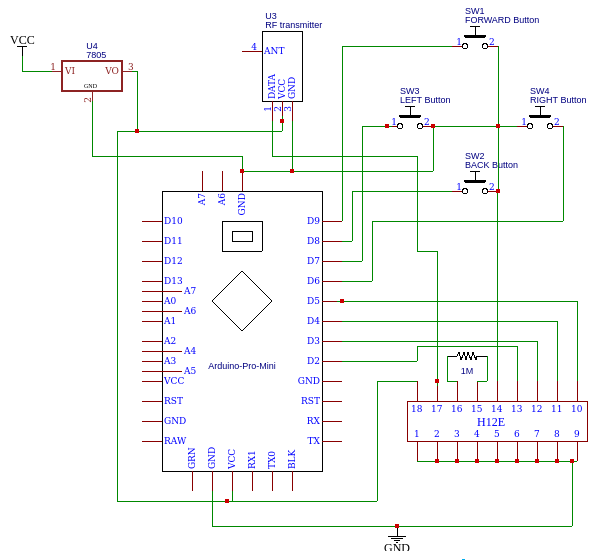 在上面的电路中,您可以看到所有四个按钮的一侧连接到Arduino(D6-D9)的四个数字引脚,而所有其他四个侧面都接地。当我们按下按钮时,相应的数字引脚变为逻辑低电平。 HT12E编码器的四个并行输入连接到Arduino(D2-D5)的另外四个数字引脚。因此,借助Arduino,我们可以确定编码器的输入。 编码器HT12E是12位编码器和并行输入-串行输出编码器。在12位中,有8位是地址位,可用于控制多个接收器。引脚A0-A7是地址输入引脚。在本文中,我们仅控制一个接收器,因此我们不需要更改其地址,因此我将所有地址引脚都接地了。如果要用一个发射器控制不同的接收器,则可以在此处使用DIP开关。 AD8-AD11是控制位输入。这些输入将控制HT12D解码器的D0-D3输出。我们需要连接一个振荡器进行通信,并且在5V操作下,振荡器频率应为3KHz。然后,对于5V,电阻值将为1.1MΩ。然后,我将HT12E的输出连接到发射器模块。
在上面的电路中,您可以看到所有四个按钮的一侧连接到Arduino(D6-D9)的四个数字引脚,而所有其他四个侧面都接地。当我们按下按钮时,相应的数字引脚变为逻辑低电平。 HT12E编码器的四个并行输入连接到Arduino(D2-D5)的另外四个数字引脚。因此,借助Arduino,我们可以确定编码器的输入。 编码器HT12E是12位编码器和并行输入-串行输出编码器。在12位中,有8位是地址位,可用于控制多个接收器。引脚A0-A7是地址输入引脚。在本文中,我们仅控制一个接收器,因此我们不需要更改其地址,因此我将所有地址引脚都接地了。如果要用一个发射器控制不同的接收器,则可以在此处使用DIP开关。 AD8-AD11是控制位输入。这些输入将控制HT12D解码器的D0-D3输出。我们需要连接一个振荡器进行通信,并且在5V操作下,振荡器频率应为3KHz。然后,对于5V,电阻值将为1.1MΩ。然后,我将HT12E的输出连接到发射器模块。
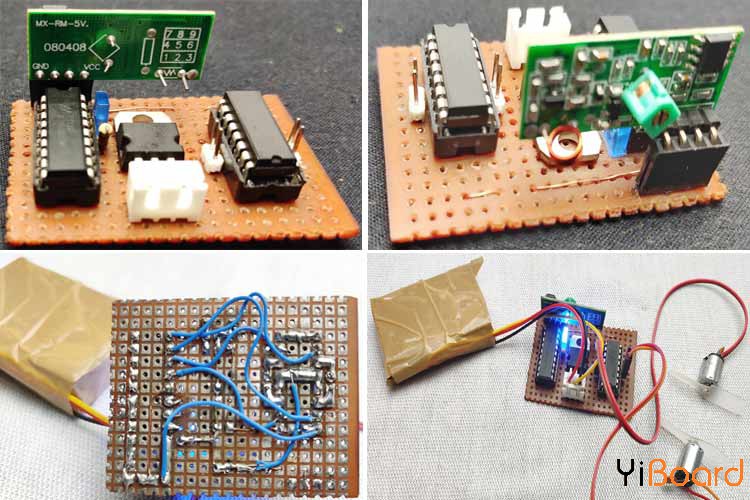
制作遥控小船发送电路
我将每个组件焊接在一块PCB面包板上。请记住,我们正在开发一个射频项目,因此有可能会遇到多种类型的干扰,因此请尽可能紧密地连接所有组件。另外,请尝试将所有东西焊接在焊盘上,而不要使用多余的电线。最后,将一根细电线连接到发射器模块,这将有助于增加总范围。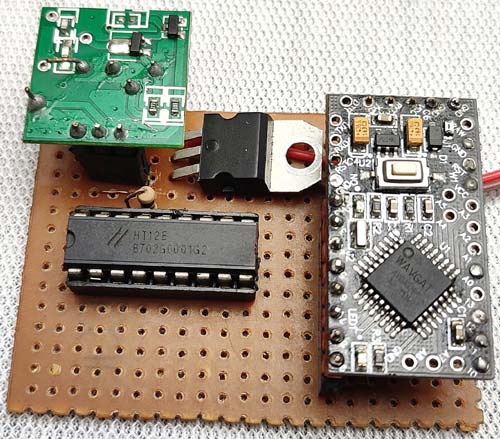
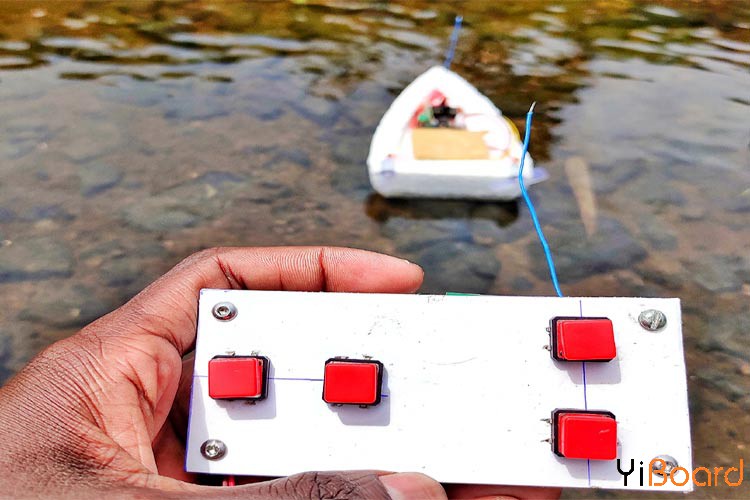
制作Arduino遥控小船发射器外壳
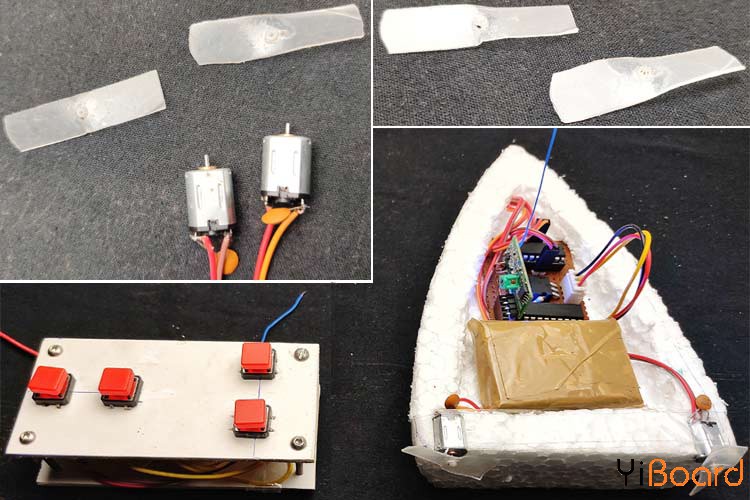
发射器需要有一个好看的外壳。我选择了4mm MDF薄板,也可以选择胶合板、泡沫薄板或硬纸板,然后从中切出两块,长度分别为10cm和宽5cm。然后标记了按钮的位置。我将方向按钮放在左侧,将前进、后退按钮放在右侧。在纸张的另一侧,我将按钮连接到主发送电路。请记住,一个普通的按钮有4个引脚,每侧有两个引脚。将一个引脚连接到Arduino,将另一个引脚连接到地。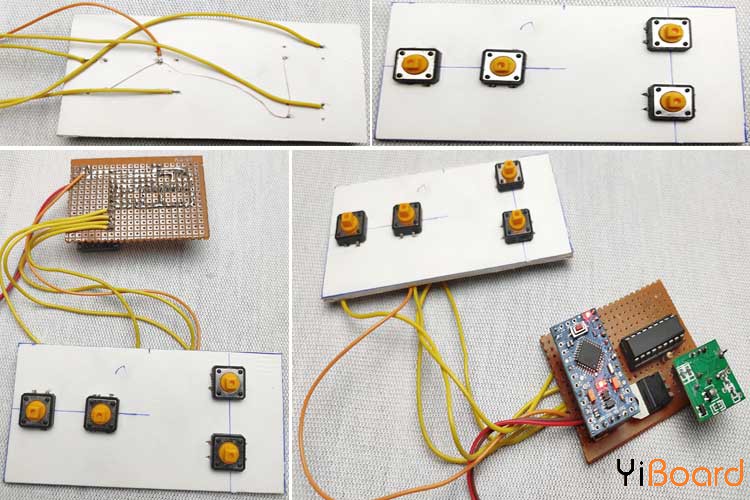 连接所有这些东西之后,我将控制电路放在两个MDF板之间,并用一些长螺栓拧紧。 433Mhz接收器模块
连接所有这些东西之后,我将控制电路放在两个MDF板之间,并用一些长螺栓拧紧。 433Mhz接收器模块
该接收器也非常小巧,有4个引脚:VCC、接地,中间的两个引脚是数据输出。该模块的工作电压为5v。
Arduino遥控小船接收器的功能框图
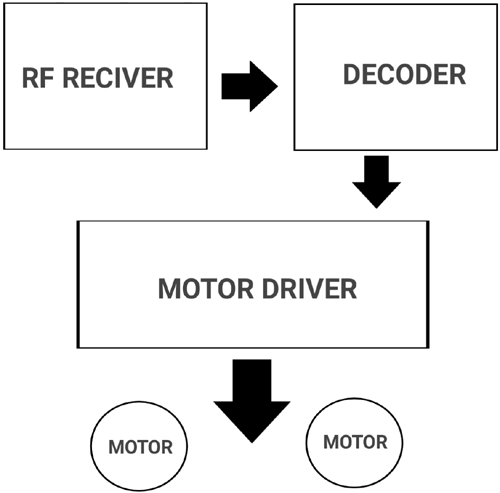
上面的框图描述了RF接收器电路的工作过程。首先,我们可以使用RF接收器模块接收发送的信号。该接收器的输出是串行数据。解码器将串行数据解码为我们的原始并行数据。在本部分中,我们不需要任何微控制器,我们可以将输出直接连接到电机驱动器。
Arduino遥控小船接收器电路图
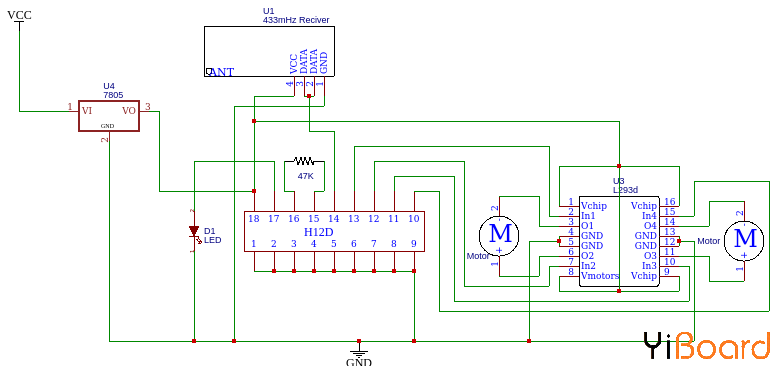
HT12D是一个12位解码器,它是一个串行输入并行输出解码器。 HT12D的输入引脚将连接到具有串行输出的接收器。在12位中,有8位(A0-A7)是地址位,并且HT12D仅在匹配其当前地址时才对输入进行解码。 D8-D11是输出位。为了使该电路与发送器电路匹配,我将所有地址引脚接地。来自模块的数据是串行类型,解码器将此串行数据解码为原始并行数据,然后通过D8-D11取出。为了匹配振荡频率,应将33-56k电阻连接到振荡器引脚。第17引脚上的LED指示灯指示有效的传输,只有在接收器连接到发送器后才会点亮。接收器的电压输入也是6-12伏。 为了控制电动机,我使用了L293D,选择该IC是因为减小了尺寸和重量,并且该IC最适合在两个方向上控制两个电动机。 L293D有16个引脚,下图显示了引脚排列。
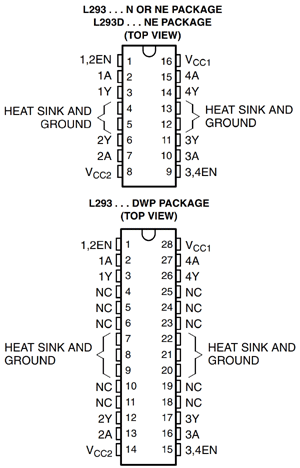
1、9个引脚为使能引脚,我们将其连接到5v,电动机1A、2A、3A和4A为控制引脚。如果引脚1A变为低电平而2A变为高电平,则电动机将向右旋转;如果引脚1A变为低电平而2A变为高电平,电动机将向左侧旋转。因此,我们将这些引脚连接到解码器的输出ps。 1Y、2Y、3Y和4Y是电机连接引脚。 Vcc2是电动机驱动电压引脚,如果使用高压电动机,则将该引脚连接到相应的电压源。
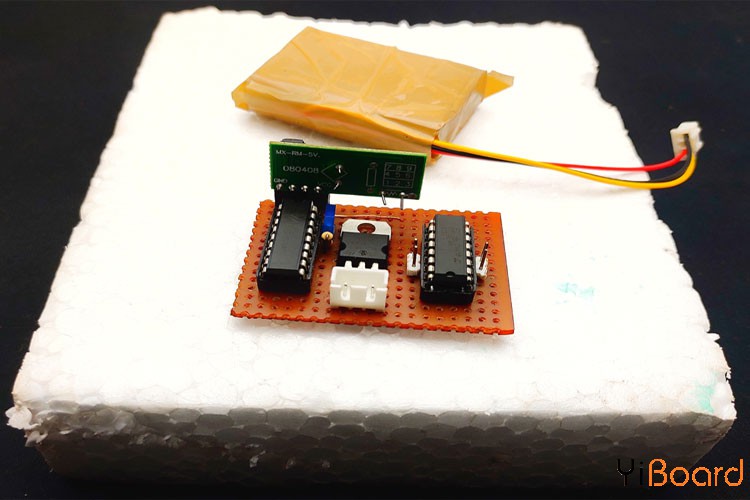
制作Arduino遥控小船的接收器电路
与发射器电路相同,将所有组件焊接在一块小的PCB面包板中,并尝试使用最少的导线。我使用的是5V电机,因此将电机驱动器的引脚8连接到5v。
制作遥控小船
我尝试了不同的材料来制作船体。使用Thermocol Sheet我得到了更好的结果。所以我决定用Thermocol来制造船体。首先,我拿出一块3厘米厚的Thermocol片,并将接收器电路放在顶部,然后用Thermocol标记船的形状并切开。
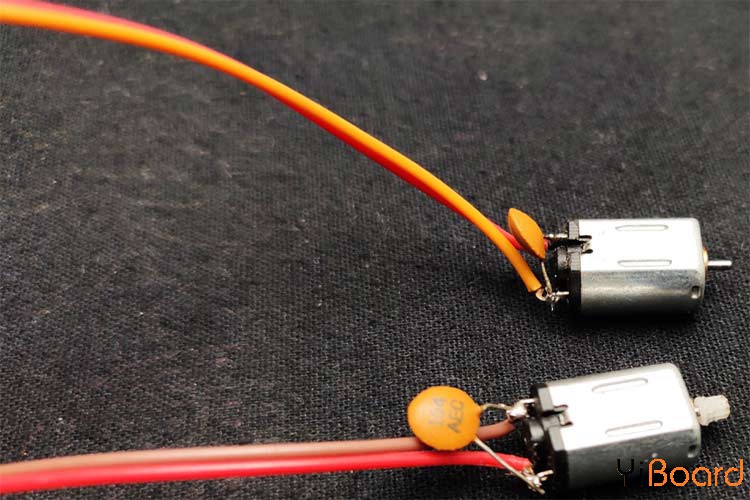
Arduino小船电机和推进器选择正确的电动机非常重要,我选择了体积小且重量轻的5V,n20型普通直流电动机。
对于螺旋桨,我用塑料片制成螺旋桨。为了制作螺旋桨,首先,我取了一个小塑料片,并从中切下了两个小块,然后借助蜡烛加热将其弯曲。最后,我在马达中心放置了一个小孔,并将其固定在马达上。
遥控小船的Arduino代码
编程代码非常简单,我们只需要一些逻辑切换。而且我们可以使用Arduino基础函数来实现所有功能。 首先,在代码中定义四个输入按钮和解码器输入引脚的编号。
int f_button = 9;
int b_button = 8;
int l_button = 7;
int r_button = 6;
int m1=2;
int m2=3;
int m3=4;
int m4=5;
在setup函数中,定义了引脚模式。按钮连接到数字引脚,因此这些引脚应定义为输入;我们需要获取解码器输入的输出,因此我们应将这些引脚定义为输出。
pinMode(f_button,INPUT_PULLUP);
pinMode(b_button,INPUT_PULLUP);
pinMode(l_button,INPUT_PULLUP);
pinMode(r_button,INPUT_PULLUP);
pinMode(m1,OUTPUT);
pinMode(m2,OUTPUT);
pinMode(m3,OUTPUT);
pinMode(m4,OUTPUT);
接下来,在loop函数中,我们将使用Arduino的digitalread()函数读取按钮状态。如果引脚状态变为低电平,则意味着相应的引脚被按下,那么我们将执行以下条件:
if ( digitalRead(f_button)==LOW)
这意味着按下前进按钮:
{
digitalWrite(m1, LOW);
digitalWrite(m3, LOW);
digitalWrite(m2, HIGH);
digitalWrite(m4, HIGH);
}
这将下拉编码器的m1和m2,并激活接收器侧的两个电机。同样,向后移动
{
digitalWrite(m1, HIGH);
digitalWrite(m3, HIGH);
digitalWrite(m2, LOW);
digitalWrite(m4, LOW);
}
编译代码后,将其上传到Arduino开发板。 故障排除:将船放在水面上,请检查船是否在正确移动,如果没有,改变电动机和螺旋桨的极性。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/191521.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
