大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
2 永磁同步电机控制原理
2.1 从PMSM电机的数学模型出发。
dq 轴 电压方程:

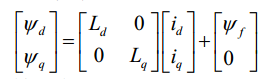
dq 轴 轴磁链方程:
dq 轴 转矩方程:

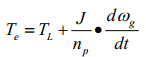
dq 轴 运动方程:

分析上述方程,如果我们能够控制 id=0
那么电压方程就可简化为:
转矩方程为:

运动方程为:
以上式中:ψf 是永磁体磁链,R 和 L 是定子绕组的电阻电感,we 是电机电角速度
,wm 是电机的机械角速度,p 为极对数,kt 是转矩常数,J 为转动惯量,B 为摩擦系数,Tl 是负载系数。
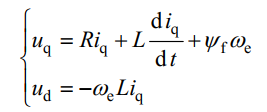
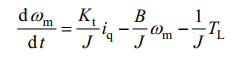
从以上方程可以看出,仅控制 iq 我们就可以控制转矩的大小,d轴电压也仅与 iq有关,这样极有益于我们的控制。
并且,当 id=0 时,相当于一台典型的他励直流电动机,定子只有交轴分量,且定子磁动势的空间矢量正好和永磁体磁场空间矢量正交。所以为了减少损耗,完全可以将id=0,降低铜耗。
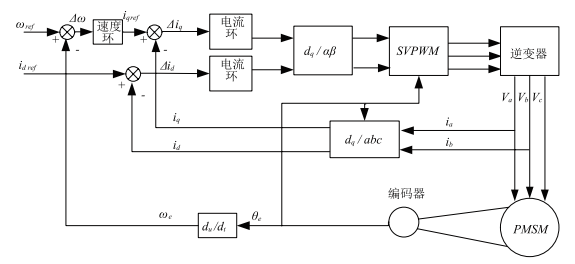
矢量控制框图如下图所示:
小结:
矢量控制的原理是在永磁同步电机上设法模拟直流电动机的转矩控制规律,经过坐标变换,使其电流矢量分解为产生磁通的电流分量和产生转矩的电流分量,两个分量互相垂直,相互独立。这样就可以对它们进行单独调节,与直流电动机的双闭环控制系统类似。(双闭环控制系统在陈伯时电力拖动控制书2.4章节有详细的介绍,大家可以回顾一下。)
2.2 坐标变换*(参考于陈伯时电力拖动自动控制系统6.6.3章节)*
2.2.1 进行坐标变换的原因
- 永磁同步电机中,定子磁势Fs、转子磁势Fr、气隙磁势之间的夹角都不是90°,耦合性强,根本无法对磁场和电磁转矩进行独立控制
- 直流电机励磁磁场垂直于电枢磁势,二者各自独立,互不影响
- 直流电机控制策略多种多样,能够使其应对不同场合
所以将永磁同步电机的数学模型分析后,进行坐标变换将其模拟为直流电机进行控制,会很大程度上提高电机可控性和运行效率。
2.2.2 坐标变换基本思路**
*
不同电机模型等效的原则:在不同坐标系所产生的磁动势完全一致。
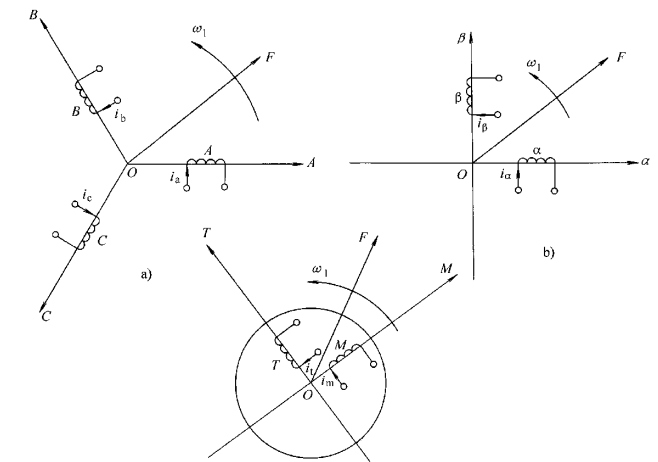
如上图中a中,电机通入三相平衡的正弦电流时,所产生的合成磁动势是旋转磁动势,它在空间上是呈正弦分布的,以同步转速w1顺着A-B-C的顺序进行旋转。而旋转磁动势,并不是只有三相绕组才可以产生,通入平衡的多相电流都可以产生想要的旋转电磁场,其中两相的最为简便。只需要通入时间上互查90°的平衡交流电就可以产生旋转磁场。如果控制a中和b中的旋转磁动势的大小和转速都相同,那么即可认为二者等效。
在看c图,两个相互垂直的绕组M和T,其中通以电流im和it,产生合成磁动势F,显然这个磁动势相对于M和T绕组是固定的,这个时候如果人为的将两个绕组在内的整个铁芯按照以上同步转速旋转,那么即可以产生跟三相绕组等效的旋转磁场。如果假设有人站在这个铁芯上看,这个电机的模型就完全与直流电机等效了。
磁动势的等效也就代表着电流的等效,iA/iB/iB 、ia/ib 和 im/it等效,他们三者能产生相同的磁动势,现在最重要的任务就是找到 以上三组电流之间准确的等效关系。
2.3 3相静止-两相静止变换——3/2变换
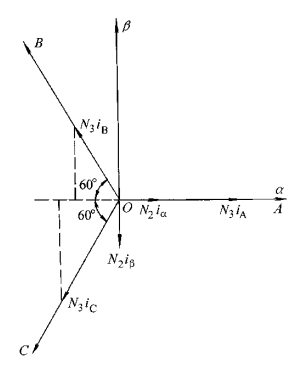
物理基础:各相磁动势=有效匝数 * 电流大小
如上图所示,为方便起见,将A相与a相重合,ABC为三相静止磁动势矢量图,ab为两相静止磁动势矢量图。
当两者磁动势相等时,两套绕组瞬时磁动势在ab轴上的投影相等。
即有以下关系式:
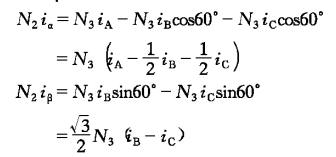
由陈伯时书籍附录4所证明,变换前后功率不变时,三相和两相的匝数比为
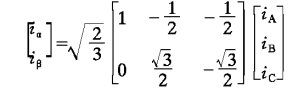
结合以上二式可得变换矩阵为:
若三相绕组是Y形联结不带零线,那么ia+ib+ic=0,代入上式可得变换矩阵:
2.4 两相静止-两相旋转变换——2s/2r变换
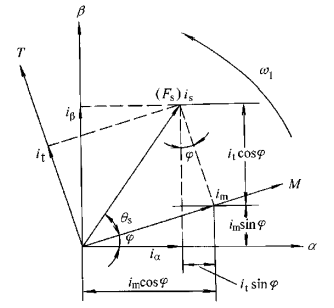
如上图所示,ab 为两相静止坐标系,MT 为两相旋转坐标系;
MT坐标系以同步转速 w1 旋转,且 it 和 im 的长度不变(由于匝数相等约去)。
而 ab 坐标系是静止不动的,a轴和M轴之间的夹角ψ随着时间而改变,
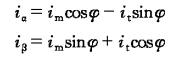
由此可推算,要使二者磁动势相等效,it 和 im 在 a 轴和 b 轴上的投影要与 ia 和 ib 等效,即可得出:
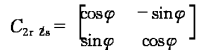
从而可得出 两相旋转变两相静止的变换矩阵为:
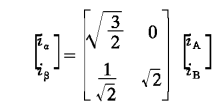
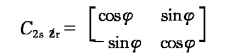
通过对矩阵变换,或者更换公式两边的位置,可得两相静止变两相旋转坐标系为:
小结:
永磁同步电机系统是一个非线性系统,通过数学变换,将这个系统拟化成一个他励直流电机模型来控制,会很大程度上降低控制难度,这是控制策略的核心。
而坐标变换的核心是不同坐标系产生磁动势一致;通过各个坐标系之间的等量关系,计算出我们需要的变换矩阵。
有了坐标变换,有了拟化的他励直流电机模型,我们下一步就是进行电流环和转速环的设计了。
需要文章资料与仿真模型的同学请博客私信我,请勿评论留下个人信息,避免信息外泄,私信看到就会发过去。
最近太忙了都没能看看博客,因此留下链接大家自取吧,里面有书籍有仿真波形也存好了,还有一些教程笔记。链接:https://pan.baidu.com/s/1MbrO5TH45CdmfaBp-gWf8A
提取码:8888

后续文章链接:
永磁同步电机矢量控制到无速度传感器控制学习教程(PMSM)
永磁同步电机矢量控制(一)——数学模型
永磁同步电机矢量控制(三)——电流环转速环 PI 参数整定
永磁同步电机矢量控制(四)——simulink仿真搭建
永磁同步电机矢量控制(五)——波形记录及其分析
永磁同步电机矢量控制(六)——MTPA最大转矩电流比控制
永磁同步电机矢量控制(七)——基于id=0的矢量控制的动态解耦策略
永磁同步电机矢量控制(八)——弱磁控制(超前角弱磁)
永磁同步电机矢量控制(九)——三闭环位置控制系统
永磁同步电机矢量控制(十)——PMSM最优效率(最小损耗)控制策略
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/190684.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
