大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
apap 算法:mdlt
matlab 很多内置函数都是对列操作,如mean()
1. VLFEAT库 检测和匹配 SIFT 关键点 kp1,kp2,matches
2. 关键点坐标齐次化:(x,y,1)
3. 归一化:normalise2dpts
Function translates and normalises a set of 2D homogeneous points so that their centroid is at the origin and their mean distance from the origin is sqrt(2). 将2d 齐次点的中心点坐标转移到原点,2d 齐次点和原点的平均距离为 2 \sqrt{2} 2 。
% 例如:
a = [1,2,3;
1,2,3;
1,1,1];
[a1,t1]=normalise2dpts(a);
% a1 =
% -1.5000 0 1.5000
% -1.5000 0 1.5000
% 1.0000 1.0000 1.0000
% 函数返回的a1 中心点为原点,且三个点距离原点的距离的平均值为 $\sqrt{2}$
% 可以验证:
dist = sqrt(a1(1,:).^2+a1(2,:).^2); % 2.1213 0 2.1213
meandist = mean(dist,2); % 1.4142
求normalise矩阵和新坐标 方法如下:
-
求中心点坐标
-
c = mean(pts(1:2, : )’ )’,先转置变成2长列求完平均点坐标再转置
-
或者可以mean(pts(1:2,finiteind),2) 即对行操作
-
-
所有点坐标减去中心点坐标,求平方和,然后得到平方和的平均值meandist
scale = sqrt(2)/meandist; T = [scale 0 -scale*c(1) 0 scale -scale*c(2) 0 0 1 ]; newpts = T*pts; % 归一化后的新关键点坐标
4. ransac 算法:对匹配对剔除外点,multigsSampling 得到500组残差 3040(sift匹配对数)*500
-
得到小于Ransac阈值数量最多的一组残差,找到内点的索引
-
在图中画出匹配关系图(内点)
5. 求全局单应矩阵, DLT
vgg_H_from_x_lin( xs1, xs2 ) 这里的 xs1和 xs2 都是 经过归一化的内点齐次坐标
-
condition points:
-
先调用
C1 = vgg_conditioner_from_pts(xs1),normalizes Pts to have 均值 0 and 样本标准偏差为 2 \sqrt {2} 2 的变换矩阵C其中,样本标准偏差计算公式:


返回3*3 矩阵 C1,其中第三行是[0 0 1]
-
再调用
vgg_condition_2d,得到 xs1 = C1* xs1,xs2 = C2* xs2 ,新得到的 xs1,xs2 中的关键点坐标均值为0,std 为 2 \sqrt{2} 2% 再次使用上面的例子 % a1 = % -1.5000 0 1.5000 % -1.5000 0 1.5000 % 1.0000 1.0000 1.0000 % 得到的a2 = C * a1 a2 = -1.4142 0 1.4142 -1.4142 0 1.4142 1.0000 1.0000 1.0000 % 可以验证: mean(a2(1:2,:),2); % ans = 0 0 std(a2(1:2,:)'); % ans = 1.4142 1.4142
-
-
svd 分解:
min h ∥ A h ∥ , s . t . ∥ h ∥ = 1 A = [ 0 0 0 − p 1 T p 2 y ∗ p 1 T p 1 T 0 0 0 − p 2 x ∗ p 1 T − p 2 y ∗ p 1 T p 2 x ∗ p 1 T 0 0 0 ] \min_h \left\| \mathrm Ah \right\|,s.t.\left\| \mathrm h \right\|=1 \\ \mathrm A = \begin {bmatrix} 0 & 0& 0& -p1^T & p2_y*p1^T\\ p1^T &0&0&0& -p2_x*p1^T \\ -p2_y*p1^T & p2_x*p1^T &0&0&0 \end {bmatrix} hmin∥Ah∥,s.t.∥h∥=1A=⎣⎡0p1T−p2y∗p1T00p2x∗p1T000−p1T00p2y∗p1T−p2x∗p1T0⎦⎤-
A 中任取两行代入一个关键点坐标,得到两个方程,N个关键点,得到的A为2N*9
-
取A 的svd分解中最小特征值对应的 v 向量,即 将9*9的V矩阵的最后一列作为 h向量
-
H = reshape(h,3,3)',matlab 中将h向量 按列重新排列成矩阵,所以需要转置 -
由于代入A 中计算的特征点是 condition points,即此处的 H*(C1 * xs1) = C2 * xs2,所以 decondition 后的H为 C 2 − 1 ∗ H ∗ C 1 C2^{-1}*H*C1 C2−1∗H∗C1 ,代码表示为:
H = C2\H*C1;\ 表示对 C2 求逆 -
H = H/H(3,3)H(3,3) 归一化为1
-
-
Denormalise:
由于之前使用 normalise2dpts 对原始关键点坐标做了处理,现在恢复H:
H = T2\H*T1 % 类似deconditon
6. 得到拼接画布的尺寸大小
-
Map four corners of the right image. 采用的是左图保持原状,右图进行单应变换。
由于求得的H 是将左图映射到右图,即 H*x_left = x_right,所以 x_left = inv(H) * x_right.
取右图的四个顶点的齐次坐标 分别作为 x_right 的值,得到新的四个顶点坐标:TL, BL, TR, BR
%% 例如求左顶点 TL = Hg\[1;1;1]; % 即 inv(Hg)*[1;1;1], 得到非齐次形式 TL = round([ TL(1)/TL(3) ; TL(2)/TL(3) ]); % 齐次化! -
确定画布的尺寸(cw, ch)
cw = max([1 size(img1,2) TL(1) BL(1) TR(1) BR(1)]) - min([1 size(img1,2) TL(1) BL(1) TR(1) BR(1)]) + 1; % 投影面的 宽,通过最大的x(列)-最小的x(列)+1 ch = max([1 size(img1,1) TL(2) BL(2) TR(2) BR(2)]) - min([1 size(img1,1) TL(2) BL(2) TR(2) BR(2)]) + 1; % 投影面的 高 -
确定左图的偏移量off,即左图img1 左顶点 在画布坐标系中的 坐标 (在下图中有体现)
off = [ 1 - min([1 size(img1,2) TL(1) BL(1) TR(1) BR(1)]) + 1 ; 1 - min([1 size(img1,1) TL(2) BL(2) TR(2) BR(2)]) + 1 ];
7. 使用全局单应矩阵 映射源图像
-
在空画布warped_img1 (ch, cw )中 根据偏移量off 确定 左图img1 的映射位置
-
调用
imagewarping.cpp,将matlab 中的变量传入c++ 函数,二维数组变成按列排列的一维数组指针,三维数组(如rgb 图像)变成二维数组指针(M* ( N * 3) ),不过在取像素值时也是变成一维数组按列索引void mexFunction(int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) // nlhs 代表输出参数个数,nrhs 代表输入参数个数 { // 使用DLT,则输入参数为: // double(ch),double(cw),double(img2),Hg,double(off) } -
上一步得到的TL, BL, TR, BR四个顶点坐标,是以img1 的左顶点为坐标原点.
而在 imagewarping.cpp 中,需要以画布的左顶点为坐标原点.(在下图中有体现)
例如:img2的原左顶点(1;1;1),经过 H − 1 ∗ ( 1 ; 1 ; 1 ) H^{-1}*(1;1;1) H−1∗(1;1;1) ,得到TL = (906; -141),此时的坐标系是img1。
在以画布(3315*1844)为坐标系时,img2对应的TL = (906; 203),所以需要先减去 偏移量off (1;345)再加(1;1),得到(906; -141),再用 H * (906; -141; 1),再齐次化,即可大概得到 (1;1)。
单 应 变 换 : x ~ ′ = H x ~ x = [ x , y ] T , x ~ = [ x , y , 1 ] T 计 算 得 到 的 x ~ ′ = [ x ′ , y ′ , z ′ ] , 后 续 使 用 需 要 齐 次 形 式 , 即 x ′ = [ x ′ / z ′ , y ′ / z ′ ] . 单应变换:\widetilde{\mathrm x}’= \mathrm H \widetilde{\mathrm x} \\ \mathrm x = [x,y]^T,\widetilde{\mathrm x}=[x,y,1]^T\\ 计算得到的 \widetilde{\mathrm x}’ =[x’,y’,z’],后续使用需要齐次形式,即\mathrm x’=[x’/z’,y’/z’].\\ 单应变换:x
′=Hx
x=[x,y]T,x
=[x,y,1]T计算得到的x
′=[x′,y′,z′],后续使用需要齐次形式,即x′=[x′/z′,y′/z′].% 验证结果: Hg*[906;-141;1]= [1.2193;1.4887;0.9824]; % 齐次化后的坐标: [1.2411; 1.5153] ≈ [1; 2]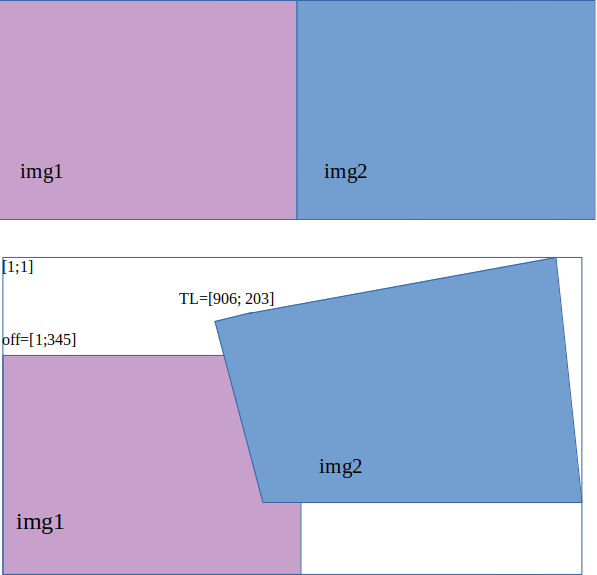
/* For each pixel in the target image... */ // H * canv = img2 for(i=0;i<canvm;i++) { for(j=0;j<canvn;j++) { /* Get projective transformation for current source point (i,j). */ // 将source image(canv) 映射到 target image(img2) 的坐标为(posa, posb) posa = round(((H[(Hm*0)+0] * (j-off[0]+1)) + (H[(Hm*1)+0] * (i-off[1]+1)) + H[(Hm*2)+0]) / ((H[(Hm*0)+2] * (j-off[0]+1)) + (H[(Hm*1)+2] * (i-off[1]+1)) + H[(Hm*2)+2])); posb = round(((H[(Hm*0)+1] * (j-off[0]+1)) + (H[(Hm*1)+1] * (i-off[1]+1)) + H[(Hm*2)+1]) / ((H[(Hm*0)+2] * (j-off[0]+1)) + (H[(Hm*1)+2] * (i-off[1]+1)) + H[(Hm*2)+2])); /* Find if the current pixel/point in the (warped) source image falls inside canvas. */ if ((posa > 1)&&(posa < img2n)&&(posb>1)&&(posb<img2m)) { // 如果映射后的点在img2 中,则进行像素赋值 /* If the current pixel in the source image hits the target (i.e., is inside the canvas) * we get its corresponding position in the 2D array. */ cidx = ((j-1)*canvm)+(i-1); sidx = ((posa-1)*img2m)+(posb-1); /* Warping pixel in source image to canvas. */ if (cidx+ch1canv >= 0 && cidx+ch3canv < canvm*canvn*3 && sidx+ch1img2 >= 0 && sidx+ch3img2 < img2m*img2n*3) { // 像素点 赋值是按照数组指针,同一个点的rgb通道依次赋值 warped_img2[cidx+ch1canv] = img2[sidx+ch1img2]; warped_img2[cidx+ch2canv] = img2[sidx+ch2img2]; warped_img2[cidx+ch3canv] = img2[sidx+ch3img2]; } } } }
8. 线性加权融合 Blending images by simple average (linear blending)
上一步得到的warped_img1是左图所在位置,warped_img2是右图所在位置,都是ch*cw 的尺寸
调用imageblending(warped_img1, warped_img2):
-
二值化
imfill(img, 'holes') -
将二值化的值 作为左右图在每个像素点的权重,简单加权:(img1* w1+ img2* w2) / (w1+w2)
9. APAP,Moving DLT (projective)
-
左图img1 的内点的原始坐标 K p \mathrm{Kp} Kp,以左图左顶点为参考
-
将画布划分成99*99个网格,记录网格所有顶点的坐标:则 X, Y 维度都是100 *100,以画布左顶点为参考
变换画布顶点的坐标,则
Mv = [X(:)-off(1), Y(:)-off(2)];此时以左图左顶点为参考 -
对每一个网格顶点,计算其与 img1 中所有内点的高斯权重 Gki :
Gki = exp(-pdist2(Mv(i,:),Kp)./sigma^2);算法理论:
w ∗ i = exp ( − ∥ x ∗ − x i ∥ 2 / σ 2 ) 这 里 的 x ∗ 是 网 格 的 顶 点 坐 标 , x i 是 经 过 R A N S A C 算 法 筛 选 后 的 匹 配 对 ( x i , x i ′ ) 中 的 左 图 关 键 点 坐 标 ! 写 成 矩 阵 形 式 : h ∗ = arg min h ∥ W ∗ A h ∥ 2 , 这 是 一 个 W S V D 问 题 , 其 解 为 W ∗ A 对 应 的 最 小 特 征 值 的 右 奇 异 特 征 向 量 ! 其 中 , 权 重 矩 阵 W ∗ = d i a g ( [ w ∗ 1 w ∗ 1 ⋯ w ∗ N w ∗ N ] ) ∈ R 2 N × 2 N w_*^i=\exp(-\left\|\mathrm x_*-\mathrm x_i\right\|^2/\sigma^2) \\ 这里的 \mathrm x_*是网格的顶点坐标,\mathrm x_i 是经过\mathrm{RANSAC}算法筛选后的匹配对(\mathrm x_i,\mathrm x_i’)中的左图关键点坐标! \\ 写成矩阵形式:\\ \mathrm h_*= \mathop{\arg\min}_{\mathrm h} \ \ \| \mathrm{W_*Ah}\|^2,这是一个\mathrm {WSVD}问题,其解为\mathrm{W_*A}对应的最小特征值的右奇异特征向量! \\其中,权重矩阵 \mathrm W_*=\mathrm{diag}([w_*^1 w_*^1\cdots w_*^N w_*^N])\in \mathbb{R}^{2N×2N} w∗i=exp(−∥x∗−xi∥2/σ2)这里的x∗是网格的顶点坐标,xi是经过RANSAC算法筛选后的匹配对(xi,xi′)中的左图关键点坐标!写成矩阵形式:h∗=argminh ∥W∗Ah∥2,这是一个WSVD问题,其解为W∗A对应的最小特征值的右奇异特征向量!其中,权重矩阵W∗=diag([w∗1w∗1⋯w∗Nw∗N])∈R2N×2N
-
为了避免数值问题,将权重过于接近0的数以一个小量 γ \gamma γ 来代替:
Wi = max(gamma,Gki); -
进行 wsvd 分解,调用
wsvd.cpp得到各个网格顶点对应的 局部单应矩阵 -
同样地,进行
De-condition和De-normalize处理 !
10. Warping images with Moving DLT 映射左右图到画布
imagewarping 函数传入的参数有:double(ch),double(cw),double(img2),Hmdlt,double(off),X(1,:),Y(:,1)'
其中,Hmdlt 矩阵的每一行是网格顶点的局部单应矩阵 按列排列后的结果
-
在空画布warped_img1 (ch, cw )中 根据偏移量off 确定 左图img1 的映射位置
-
确定空画布warped_img2 (ch, cw )中 每一点使用哪一个局部单应矩阵
/* Get grid point for current pixel(i,j) */ for(xinx=0; xinx < xn && j >= X[xinx]; xinx++); // xn =100,yn=100 for(yinx=0; yinx < yn && i >= Y[yinx]; yinx++); inx = yinx + xinx*yn; -
将该点映射到img2 中,如果在范围内,则进行颜色通道间的像素赋值
11. 线性加权融合 (方法同 DLT)
That’s all ! B y e b y e . {\color{Green} Byebye.} Byebye.
-
遗留问题:
- 将关键点匹配对内点代入A 矩阵时,符号有点问题 (vgg_H_from_x_lin.m)
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/190527.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
