大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
一. Mask-RCNN 介绍
上篇文章介绍了 FCN,这篇文章引入个新的概念 Mask-RCNN,看着比较好理解哈,就是在 RCNN 的基础上添加 Mask。
Mask-RCNN 来自于年轻有为的 Kaiming 大神,通过在 Faster-RCNN 的基础上添加一个分支网络,在实现目标检测的同时,把目标像素分割出来。
论文下载:Mask R-CNN 部分翻译
代码下载:【Github】
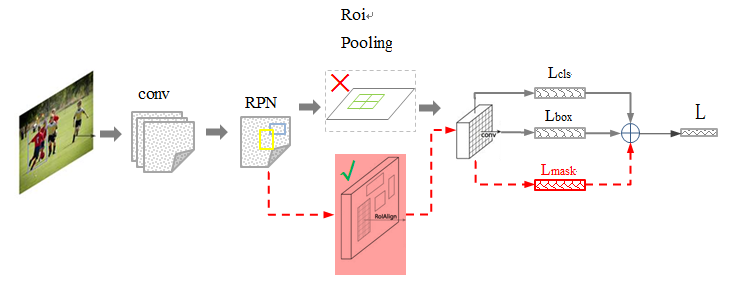
Mask-RCNN 的网络结构示意(在作者原图基础上修改了一下):

假设大家对 Faster 已经很熟悉了,不熟悉的同学建议先看下之前的博文:【目标检测-RCNN系列】
其中 黑色部分为原来的 Faster-RCNN,红色部分为在 Faster网络上的修改:
1)将 Roi Pooling 层替换成了 RoiAlign;
2)添加并列的 FCN 层(mask 层);
先来概述一下 Mask-RCNN 的几个特点(来自于 Paper 的 Abstract):
1)在边框识别的基础上添加分支网络,用于 语义Mask 识别;
2)训练简单,相对于 Faster 仅增加一个小的 Overhead,可以跑到 5FPS;
3)可以方便的扩展到其他任务,比如人的姿态估计 等;
4)不借助 Trick,在每个任务上,效果优于目前所有的 single-model entries;
包括 COCO 2016 的Winners。
PS:写到这儿提醒一句,建议大家先读一遍 原 Paper,这样再回来看的话会有第二次理解。
二. RCNN行人检测框架
基于最早的 Faster RCNN 框架,出现不少改进,主要有三篇需要看:
1)作者推荐的这篇
Speed/accuracy trade-offs for modern convolutional object detectors
论文下载【arxiv】
2)ResNet
MSRA也算是作者自己的作品,可以 refer to blog【ResNet残差网络】
论文下载【arxiv】
3)FPN
Feature Pyramid Networks for Object Detection,通过特征金字塔来融合多层特征,实现CNN。
论文下载【arxiv】
来看下 后面两种 RCNN 方法与 Mask 结合的示意图(直接贴原图了):
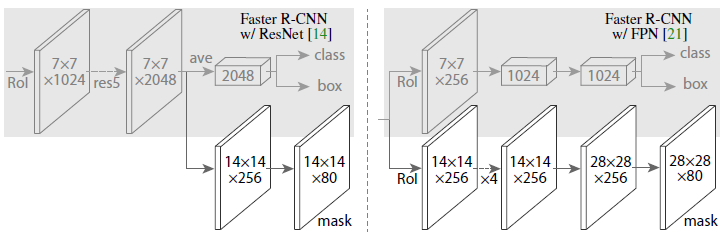
图中灰色部分是 原来的 RCNN 结合 ResNet or FPN 的网络,下面黑色部分为新添加的并联 Mask层,这个图本身与上面的图也没有什么区别,旨在说明作者所提出的Mask RCNN 方法的泛化适应能力 – 可以和多种 RCNN框架结合,表现都不错。
三. Mask-RCNN 技术要点
● 技术要点1 – 强化的基础网络
通过 ResNeXt-101+FPN 用作特征提取网络,达到 state-of-the-art 的效果。
● 技术要点2 – ROIAlign
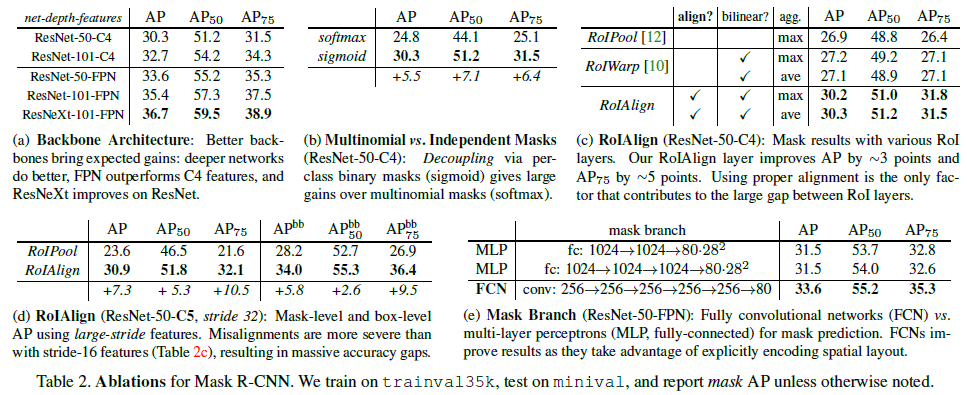
采用 ROIAlign 替代 RoiPooling(改进池化操作)。引入了一个插值过程,先通过双线性插值到14*14,再 pooling到7*7,很大程度上解决了仅通过 Pooling 直接采样带来的 Misalignment 对齐问题。
PS: 虽然 Misalignment 在分类问题上影响并不大,但在 Pixel 级别的 Mask 上会存在较大误差。
后面我们把结果对比贴出来(Table2 c & d),能够看到 ROIAlign 带来较大的改进,可以看到,Stride 越大改进越明显。
● 技术要点3 – Loss Function
每个 ROIAlign 对应 K * m^2 维度的输出。K 对应类别个数,即输出 K 个mask,m对应 池化分辨率(7*7)。Loss 函数定义:
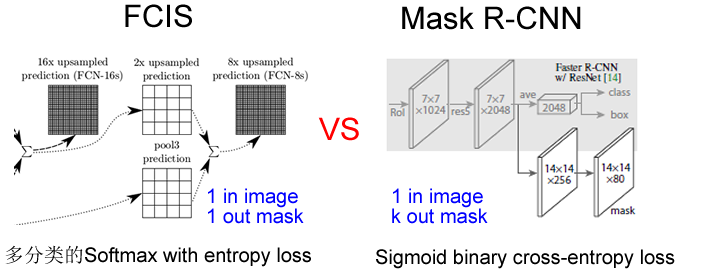
Lmask(Cls_k) = Sigmoid (Cls_k), 平均二值交叉熵 (average binary cross-entropy)Loss,通过逐像素的 Sigmoid 计算得到。
Why K个mask?通过对每个 Class 对应一个 Mask 可以有效避免类间竞争(其他 Class 不贡献 Loss )。
通过结果对比来看(Table2 b),也就是作者所说的 Decouple 解耦,要比多分类 的 Softmax 效果好很多。
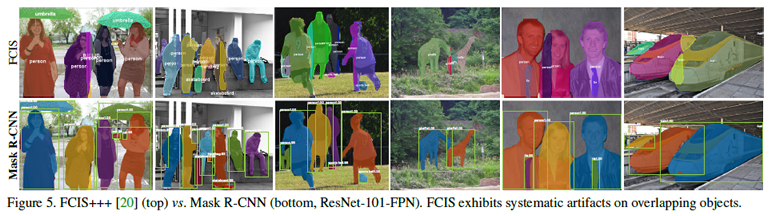
四. 对比实验效果
另外,作者给出了很多实验分割效果,就不都列了,只贴一张 和 FCIS 的对比图(FCIS 出现了Overlap 的问题):
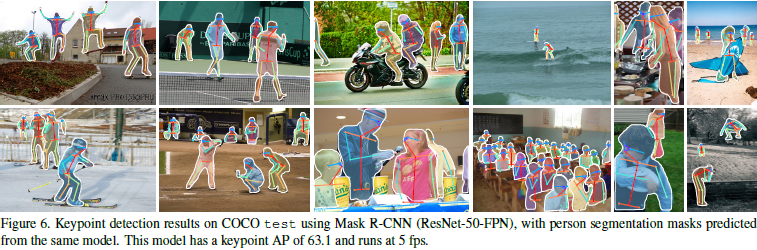
五. Mask-RCNN 扩展
Mask-RCNN 在姿态估计上的扩展,效果不错,有兴趣的童鞋可以看Paper。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/189006.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
