大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
进程状态
进程调度就是让进程从一种状态切换到另一种状态。Linux中进程的主要状态如下,
值
状态
缩写
含义
0
TASK_RUNNING
R
正在运行或可运行
1
TASK_INTERRUPTIBLE
S
可中断的休眠
2
TASK_UNINTERRUPTIBLE
D
不可中断的休眠
4
__TASK_STOPPED
T
停止状态,当进程接收到SIGSTOP等signal信息
8
__TASK_TRACED
t
跟踪状态,进程被debugger程序暂停,比如使用ptrace()调试
16
EXIT_ZOMBIE
Z
僵尸状态,进程结束时调用do_exit()先进入僵尸状体
32
EXIT_DEAD
X
死亡状态,父进程使用waitpid()或wait4()回收死亡的子进程后,状态由EXIT_ZOMBIE转换为EXIT_DEAD
下图粗略的展示了进程状态的切换,可以更加直观的理解各种进程状态。

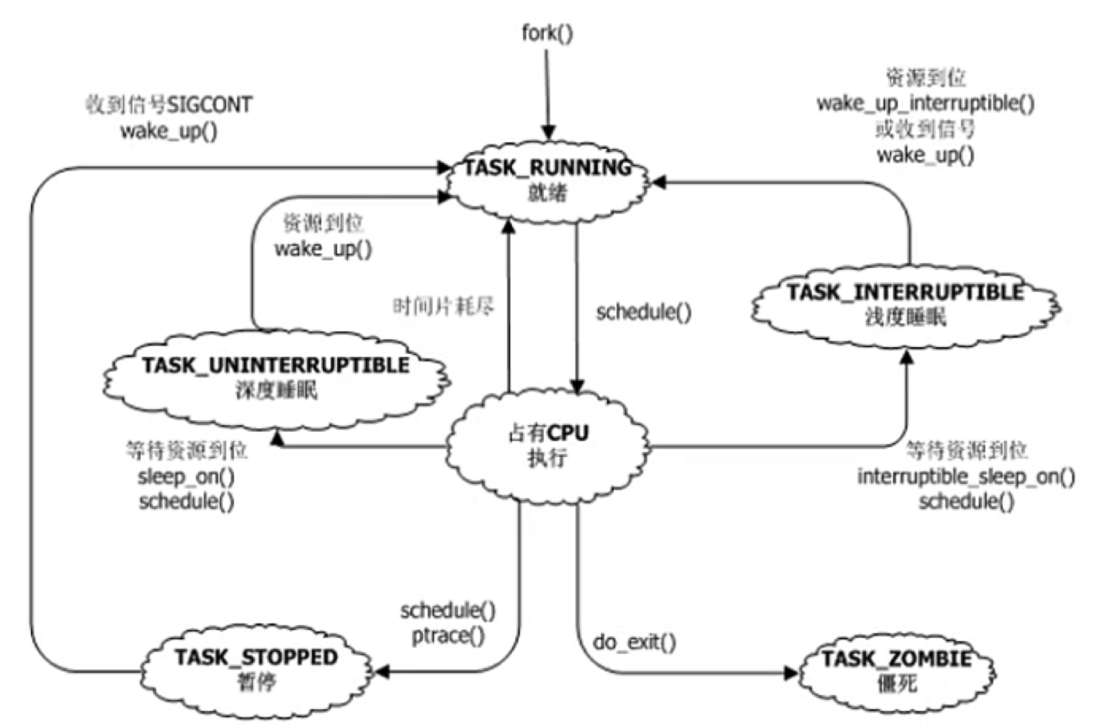
上图中需要补充说明的是,进程正在”占有CPU执行“时应该处于TASK_RUNNING状态。EXIT_ZOMBIE状态应该是很短暂的,父进程需要使用wait类系统调用回收子进程,回收后进程状态就转变为EXIT_DEAD,如果父进程一直不回收,子进程就变为僵尸进程。__TASK_TRACED状态只有在使用debugger是才会出现,例如使用gdb设置断点,进程在断点上暂停时就处于跟踪状态。
调度器
系统中包含许多进程,内核有责任让所有进程都得到运行,并让重要的进程获得更多的运行。这就需要一种机制管理所有的进程,在内核中安排进程执行的模块被称为调度器(scheduler)。
调度器从处于就绪状态的进程中挑选一个,并分配CPU时间片让它运行。
当进程运行的时间片耗尽时,调度器会将其转换为就绪状态,插入到准备执行的进程队列。
进程在放弃CPU进入睡眠或暂停状态后,如果被唤醒,调度器也会将其插入到准备队列。
所以,调度器将解决两个核心的问题:分配合适的时间片和合理安排进程执行顺序。最原始的调度策略是按照优先级排列好进程,等到一个进程运行完了再运行优先级较低的一个,但这种策略完全无法发挥多任务系统的优势。因此,随着时间推移,操作系统的调度器也多次进化。
Linux 2.4内核推出了O(n)调度器,O(n)调度器把时间分成大量的微小时间片(Epoch)。在每个时间片开始的时候,调度器会检查所有处在就绪状态的进程。调度器计算每个进程的优先级,然后选择优先级最高的进程来执行。一旦被调度器切换到执行,进程可以不被打扰地用尽这个时间片。如果进程没有用尽时间片,那么该时间片的剩余时间会增加到下一个时间片中。O(n)调度器在每次使用时间片前都要检查所有就绪进程的优先级。这个检查时间和进程中进程数目n成正比,这也正是该调度器复杂度为O(n)的原因。当计算机中有大量进程在运行时,这个调度器的性能将会被大大降低。
为了解决O(n)调度器的性能问题,O(1)调度器被发明了出来,并从Linux 2.6内核开始使用。O(1)调度器的创新之处在于,它会把进程按照优先级排好,放入特定的数据结构中。在选择下一个要执行的进程时,调度器不用遍历进程,就可以直接选择优先级最高的进程。O(1)调度器会用两个队列来存放进程。一个队列称为活跃队列,用于存储那些待分配时间片的进程。另一个队列称为过期队列,用于存储那些已经享用过时间片的进程。O(1)调度器把时间片从活跃队列中调出一个进程。这个进程用尽时间片,就会转移到过期队列。当活跃队列的所有进程都被执行过后,调度器就会把活跃队列和过期队列对调,用同样的方式继续执行这些进程。
Linux 2.6.23版本起,完全公平调度器(CFS,Completely Fair Scheduler)取代了O(1)调度器。CFS调度器不对进程进行任何形式的估计和猜测。这一点和O(1)区分互动和非互动进程的做法完全不同。CFS调度器增加了一个虚拟运行时(virtual runtime)的概念。每次一个进程在CPU中被执行了一段时间,就会增加它虚拟运行时的记录。在每次选择要执行的进程时,不是选择优先级最高的进程,而是选择虚拟运行时最少的进程。完全公平调度器用一种叫红黑树的数据结构取代了O(1)调度器的140个队列。红黑树可以高效地找到虚拟运行最小的进程。CFS调度器会根据进程的优先级来计算一个时间片因子。同样是增加250纳秒的虚拟运行时,优先级低的进程实际获得的可能只有200纳秒,而优先级高的进程实际获得可能有300纳秒。这样,优先级高的进程就获得了更多的计算资源。
进程优先级
进程优先级影响调度器的时间片分配和进程执行顺序。Linux根据进程特性,在优先级上把进程分为两大类:实时进程和普通进程。
实时进程(Real-Time Process):优先级高、需要尽快被执行的进程。它们一定不能被普通进程所阻挡,例如视频播放、各种监测系统。
普通进程(Normal Process):优先级低、更长执行时间的进程。例如文本编译器、批处理一段文档、图形渲染。
实时进程也并不是真正的实时,同样需要经过进程调度,只是会先级于普通进程运行。进程的优先级是一个0到139的整数。数字越小,优先级越高。其中,优先级0到99留给实时进程,100到139留给普通进程。普通进程的默认优先级时120,可以通过nice命令来修改进程的默认优先级。下面的命令表示将默认优先级改为(120-20)。
$nice -n -20 ./app
普通进程的默认优先级称为静态优先级,进程运行时实际采用的是动态优先级。调度程序通过增加或减少进程静态优先级的值来奖励IO消耗型进程或惩罚cpu消耗型进程,调整后的优先级称为动态优先级。动态优先级的计算公式如下。
动态优先级 = max(100 , min(静态优先级 – bonus + 5 ,139))
bonus是范围0~10的值,值小于5表示降低动态优先级以示惩罚,值大于5表示增加动态优先级以示奖赏。
调度策略
Linux系统中,实时进程和普通进程采取了不同的调度策略。实时进程使用是实时调度策略,有三种:SCHED_FIFO,SCHED_RR,SCHED_DEADLINE。
SCHED_FIFO:先进先出的实时进程。当调度器把CPU分配给进程的时候,它把该进程描述符保留在运行队列链表的当前位置。如果没有其他可运行的更高优先级实时进程,进程就继续使用CPU,想用多久就用多久,即使还有其余具有相同优先级的实时进程处于可运行状态。由RT调度器实现。
SCHED_RR:时间片轮转实时进程。当调度程序把CPU分配给进程的时候,它把该进程的描述符放在运行链表的末尾。这种策略保证对所有具有相同时间优先级的SCHED_RR实时进程公平地分配CPU时间。由RT调度器实现。
SCHED_DEADLINE:新支持的实时进程调度策略,针对突发型计算,且对延迟和完成时间高度敏感的任务适用。基于Earliest Deadline First (EDF) 调度算法。由DL调度器实现。
实时进程使用0~99的优先级,就绪进程使用队列的方式组织。相同优先级的实时进程都保存在一个列表中,再根据优先级排列起来。调度器总是先选取优先级最高的进程来运行。实时进程在下列情况下可以让出CPU,
进程被更高优先级的实时进程抢占。
进程进入休眠状态或暂停状态。
进程调用sched_yield()自愿放弃CPU。
使用SCHED_RR策略时,进程的时间片耗光。
普通进程的调度策略有三种,由CFS调度器实现,分别是:SCHED_NORMAL,SCHED_BATCH,SCHED_IDLE。
SCHED_NORMAL:(也叫SCHED_OTHER)用于普通进程,通过CFS调度器实现。
SCHED_BATCH:SCHED_NORMAL策略的分化版本,采用分时策略,根据动态优先级分配CPU运算资源。
SCHED_IDLE:优先级最低,在系统空闲时才跑这类进程。
调度设置函数
Linux进程调度的介绍就简单说这些,主要是概念普及,实用为主。下面简单列举一下调度相关的函数。
nice():调整普通进程的优先级,nice值从-20到19。
getpriority()/setpriority():获取/设置线程的优先级。
sched_getscheduler()/sched_setscheduler():获取/设置线程的调度策略。
sched_getparam()/sched_getparam():获取/设置线程的调度参数,参数由struct sched_param描述。
sched_get_priority_max()/sched_get_priority_min():获取指定策略的最大/最小优先级。
sched_rr_get_interval():获取SCHED_RR策略下实时进程的时间片长度。
sched_getattr()/sched_setattr():获取/设置调度策略和属性。这个接口是其他调度函数的超集。
sched_getaffinity()/sched_setaffinity():获取/设置线程的CPU亲和性(affinity)。
sched_yield():当前线程主动让出CPU,让其他线程执行。
Affinity表示CPU的亲和性,就是让进程在指定的CPU上尽量长时间地运行而不被迁移到其他处理器,也称为CPU关联性。再简单的点的描述就将指定的进程或线程绑定到相应的CPU上。在多核运行的机器上,每个CPU本身自己会有缓存,缓存着进程使用的信息。如果进程被调度到其他CPU上,cache命中率就会降低。当绑定CPU后,程序就会一直在指定的CPU上运行,不会被调度到其他CPU上,可以提高性能。
参考文章:
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/188152.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
