大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
概述
基于上一篇文章提到的DFS算法和BFS算法
A星算法属于图这种数据结构的搜索算法,对比于树的遍历搜索,需要考虑到的问题是:同一个节点的重复访问,所以需要对于已经访问过的节点进行标记。
曼哈顿距离:
在几何度量空间中,用以标明两个点在标准坐标系上的绝对轴距总和。
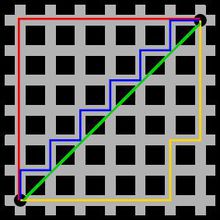

图1中绿色代表欧氏距离(直线距离),蓝色和黄色代表等价的曼哈顿距离。
d( i , j ) = |Xi – Xj| + |Yi – Yj|
优势:计算机图形学中,欧氏距离需要进行浮点运算,曼哈顿距离只涉及到加减法,运算速度大大提高。
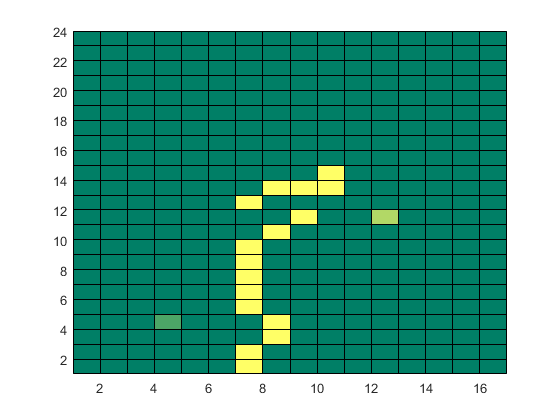
我们假设无人车需要从A点(左下侧浅绿色)移动到B点(右上侧浅黄色),但是两点之间被障碍物隔开,我们使用矩阵的形式来构建地图,其中元素为0的矩阵坐标视为可走的,值为1的视为不可走的。
clear;
clc;
clf;
figure(1);
map =[
0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0
0 0 0 .3 0 0 0 1 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 1 0 0 .7 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
];
pcolor(map)
colormap summer
[row,col] = size(map);
[start_px,start_py] = find(map == .3);
[end_px,end_py] = find(map == .7);
close = struct([]);
closelen = 0;
open = struct([]);
openlen = 0;
%% 将起点添加到open列表
open(1).row = start_px;
open(1).col = start_py;
open(1).g = 0;
open(1).h = abs(end_py - start_py) + abs(end_px - start_px);
openlen = openlen + 1;
%% 四种运动格式
sport = [0,1;0,-1;-1,0;1,0];
backNum = 0;
prev = [];
while openlen > 0
%% 获取代价最小的值
for i = 1:openlen
f(i,:) = [i,open(i).g + open(i).h];
end
f1 = sortrows(f,2);
current = open(f1(1));
choose = 0;
chooseArr = [];
%% 回溯将走过的点标记出来
if current.row == end_px && current.col == end_py
i = 1;
while(i<=size(prev,1))
if prev(i,3) == current.row && prev(i,4) == current.col
choose = choose +1;
chooseArr(choose,1) = prev(i,1);
chooseArr(choose,2) = prev(i,2);
current.row = prev(i,1);
current.col = prev(i,2);
i = 1;
else
i = i + 1;
end
end
for j = 1: size(chooseArr,1)
map(chooseArr(j,1),chooseArr(j,2)) = 0.5;
end
figure(2);
pcolor(map);
colormap winter;
return;
end
closelen = closelen + 1;
close(closelen).row = open(f1(1)).row;
close(closelen).col = open(f1(1)).col;
close(closelen).g = open(f1(1)).g;
close(closelen).h = open(f1(1)).h;
open(f1(1)) = [];
openlen = openlen -1;
for i = 1:4
dimNormal = all([current.row,current.col]+sport(i,:)>0) ...
&& current.row+sport(i,1)<=row && current.col+sport(i,2)<=col;
neighbor.row = current.row + sport(i,1);
neighbor.col = current.col + sport(i,2);
neighbor.g = abs(start_px - neighbor.row) + abs(start_py - neighbor.col);
neighbor.h = abs(end_px - neighbor.row) + abs(end_py - neighbor.col);
if dimNormal
inCloseFlag = 0;
if closelen ==0
else
for j = 1:closelen
if close(j).row == neighbor.row && close(j).col ==neighbor.col
inCloseFlag = 1;
break;
end
end
end
if inCloseFlag
continue;
end
temp_g = current.g + abs(current.row - neighbor.row) + abs(current.col - neighbor.col);
inOpenFlag = 0;
for j =1:openlen
if open(j).row == neighbor.row && open(j).col ==neighbor.col
inOpenFlag = 1;
break;
end
end
if ~inOpenFlag && map(neighbor.row,neighbor.col) ~= 1
openlen = openlen + 1;
open(openlen).row = neighbor.row;
open(openlen).col = neighbor.col;
open(openlen).g = abs(start_px - neighbor.row) + abs(start_py - neighbor.col);
open(openlen).h = abs(end_px - neighbor.row) + abs(end_py - neighbor.col);
elseif temp_g >= neighbor.g
continue;
end
backNum = backNum +1;
prev(backNum,:) = [current.row ,current.col,neighbor.row ,neighbor.col];
neighbor.g = temp_g;
else
continue;
end
end
end
生成初始图:
开始搜索
我们已经完成地图搜寻区域的准备工作,下面我们基于可以移动的四个动作(上、下、左、右)来进行搜索,我们使用openList来维护需要展开的待搜索的节点,在最开始的时候,只有起点这一项。之后,openList里面的元素可能是会经过的,也有可能是不经过的,但是经过的点都应该在openList中存在或者曾经存在。另外,对于我们已经访问过的点,我们使用closeList来进行记录,避免多次访问。
代价函数:
f(v) = g(v) + h(v)
g(v)表示由起始点到当前节点的最小cost;
h(v)表示由当前结点到目标节点的最小cost的估计值;
这里,为方便计算,笔者统一选取了曼哈顿距离用来计算g(v)和h(v)的cost值。
算法伪码:
function AStar_Routing(Gragh(V,E),src,dst)
create vertex List openList
create vertex List closeList
create prev_map
insert src into openList
while(openList.isNotEmpty)
current = the node v in openList s.t. min(f[v]) in openList
if current = dst
return reconstruction_route(prev_map,current)
endif
remove current from openList
insert current into closeList
for each neighbor u of current
if u in closeList
continue;
endif
temp_u = g[current] + h(current,u)
if u not in openList
insert u into openList
elseif temp_u >= g[u]
continue;
endif
prev_map[u] = current
g[u] = temp_cost
f[u] = g[u] + h(current,dst)
endwhile
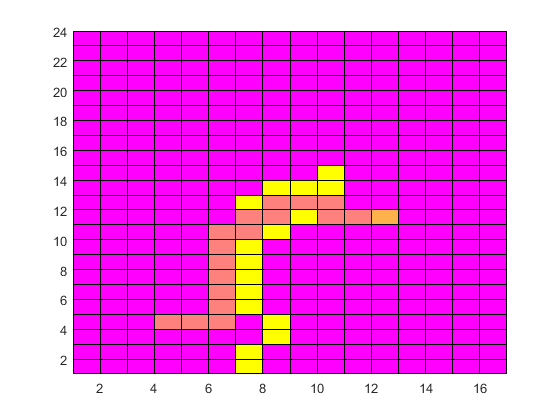
回溯后,整体PATH效果如下:
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/188079.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
