大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
文章目录
1. 先来先服务(FCFS,first come first serve)
1.1 算法思想
主要从“公平”的角度考虑
1.2 算法规则
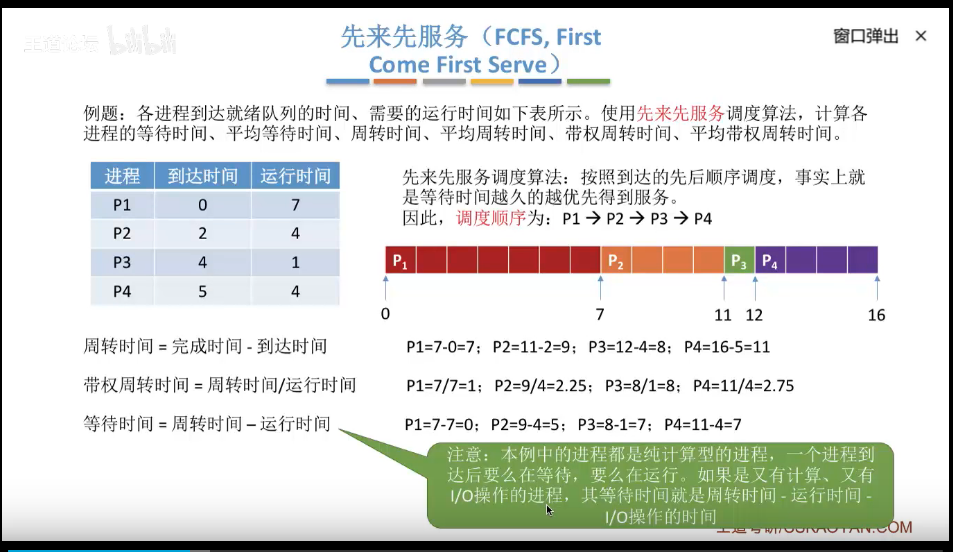
按照作业/进程到达的先后顺序进行服务。
1.3 用于作业/进程调度
用于作业调度时,考虑的是哪个作业先到达后备队列;用于进程调度时,考虑的是哪个进程先到达就绪队列
1.4 是否可抢占
非抢占式的算法
1.5 优缺点
- 优点:公平,算法实现简单
- 缺点:排在长作业(进程)后面的短作业需要等待很长时间,带权周转时间很大,对短作业来说用户体验不好。即FCFS对长作业有利,对短作业不利。
1.6 是否会导致饥饿
不会
2. 短作业优先(SJF,shortest job first)
2.1 算法思想
追求最少的平均等待时间最少的平均周转时间,最少的平均带权周转时间
2.2 算法规则
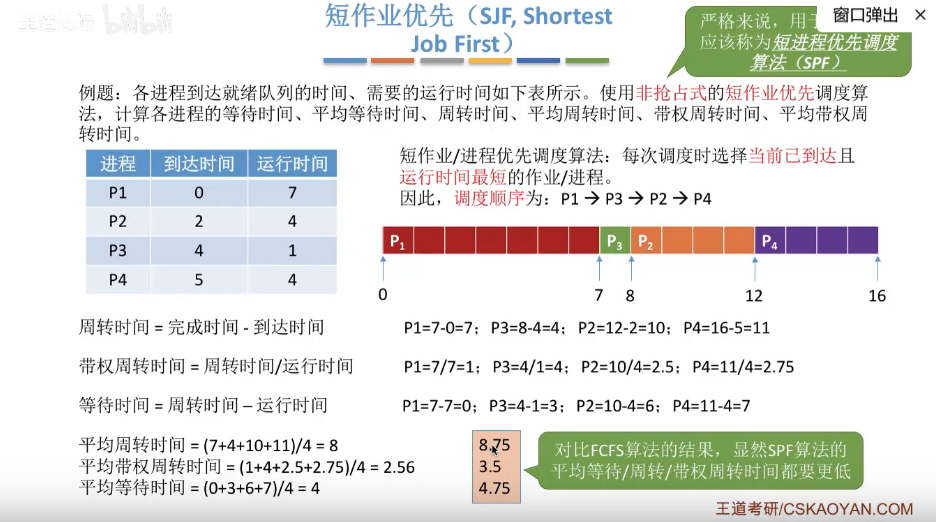
最短的作业、进程优先得到服务(所谓“最短”,是指要求服务时间最短)
2.3 用于作业/进程调度
2种都可以。。 用于进程调度时被称为“短进程优先算法”(SPF,shortest process first)
2.4 是否可抢占
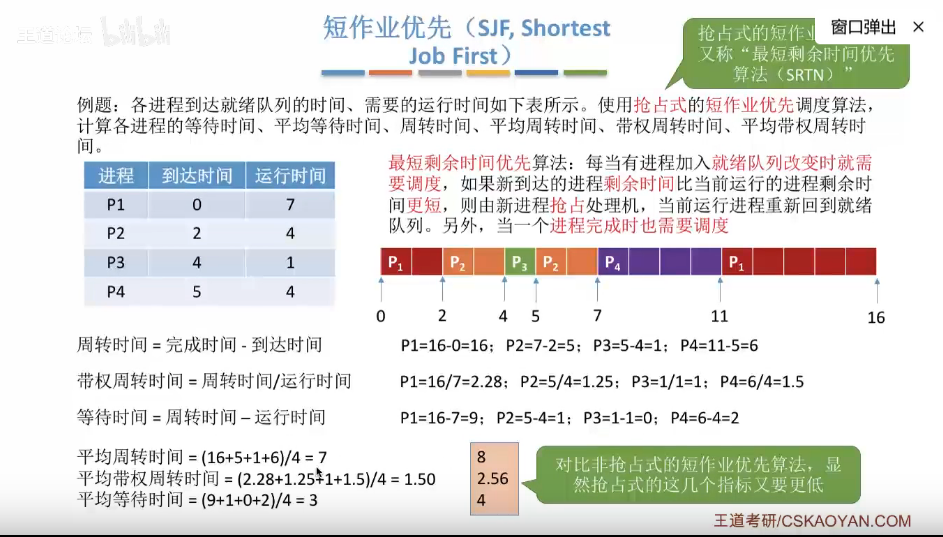
SJF和SPF是非抢占式算法,但也有抢占式的版本——最短剩余时间优先算法(SRTN,shortest remaining time next)
2.5 优缺点
- 优点:“最短的”平均等待时间,平均周转时间
- 缺点:不公平。对短作业有利,对长作业不利。可能产生饥饿现象。另外,作业/进程的运行时间是由用户提供的,并不一定真实,不一定能做到真正的短作业优先。
2.6 是否会导致饥饿
会,如果源源不断地有短作业/进程到来,可能使长作业/进程长时间得不到服务,产生“饥饿”现象。如果一直得不到服务,则称为“饿死”。
3. 高响应比优先(HRRN)
3.1 算法思想
综合考虑作业/进程的等待时间和要求服务的时间
3.2 算法规则
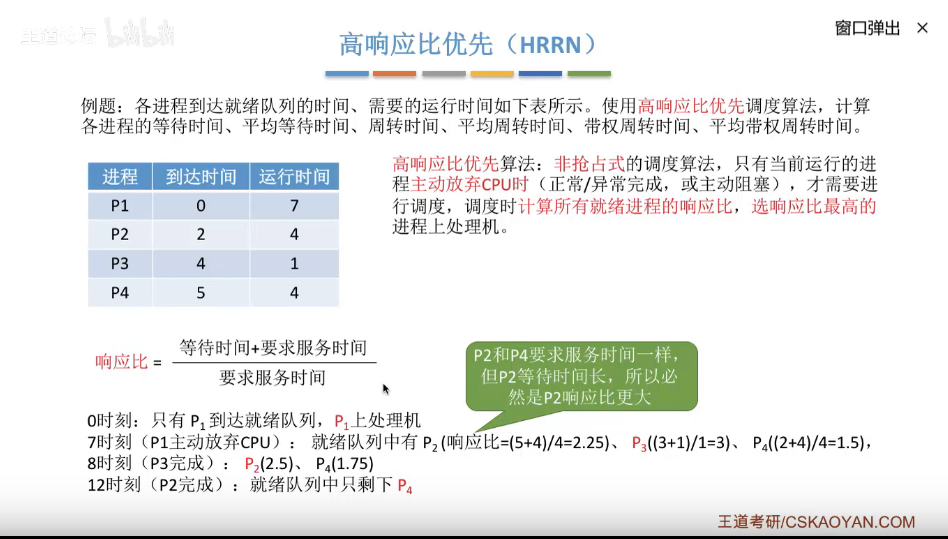
在每次调度时先计算各个作业/进程的响应比,选择响应比最高的作业/进程为其服务。
响应比 = (等待时间 + 要求服务时间) / 要求服务时间
3.3 用于作业/进程调度
都可以
3.4 是否可抢占
是非抢占式算法,因此只有当前运行的作业/进程主动放弃处理机时,才需要调度,才需要计算响应比。
3.5 优缺点
- 综合考虑了等待时间和运行时间(要求服务时间)
- 等待时间相同是,要求服务时间短的优先(SJF的优点)
- 要求服务时间相同时,等待时间长的优先(FCFS的优点)
- 对于长作业来说,随着等待时间越来越久,其响应比也会越来越大,从而避免了长作业饥饿的问题。
3.6 是否会导致饥饿
不会
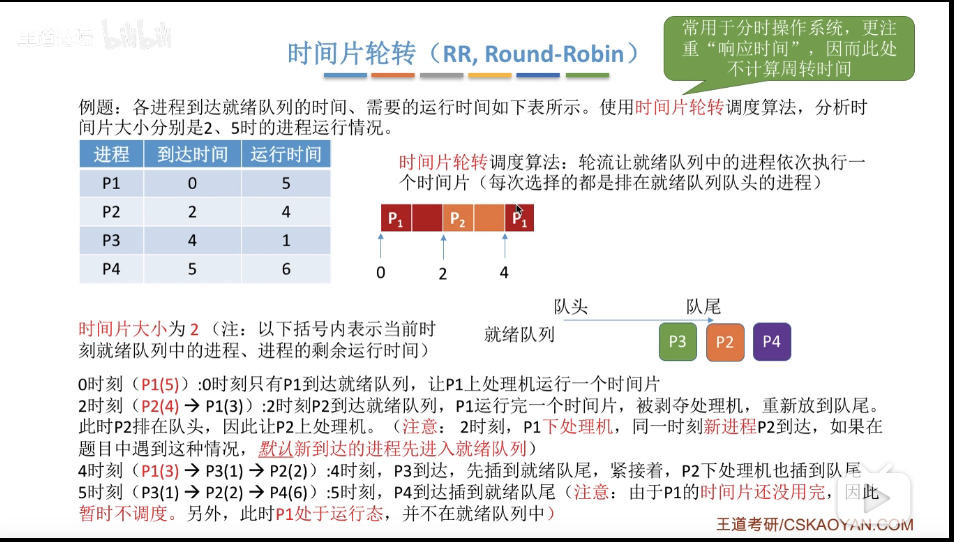
4. 时间片轮转(RR,round-robin)
4.1 算法思想
公平的,轮流地为各个进程服务,让每一个进程在一定时间间隔内都可以得到相应。
4.2 算法规则
按照各进程到达就绪队列的顺序,轮流让各个进程执行一个时间片(如100ms)。若进程未在一个时间片内执行完,则剥夺处理机,将进程重新放到就绪队列队尾重新排队。
4.3 用于作业/进程调度
用于进程调度(只有作业放入内存建立了相应的进程后,才能被分配处理机时间片)
4.4 是否可抢占
可抢占式。若进程在时间片内运行完,将被强行剥夺处理机使用权,因此时间片轮转调度算法属于抢占式的算法。由时钟装置发出时钟中断来通知CPU时间已到。
4.5 优缺点
- 优点:公平,响应快,适用于分时操作系统。
- 缺点:由于高频率的进程切换,因此有一定开销;不区分任务的紧急程度。
4.6 是否会导致饥饿
不会。
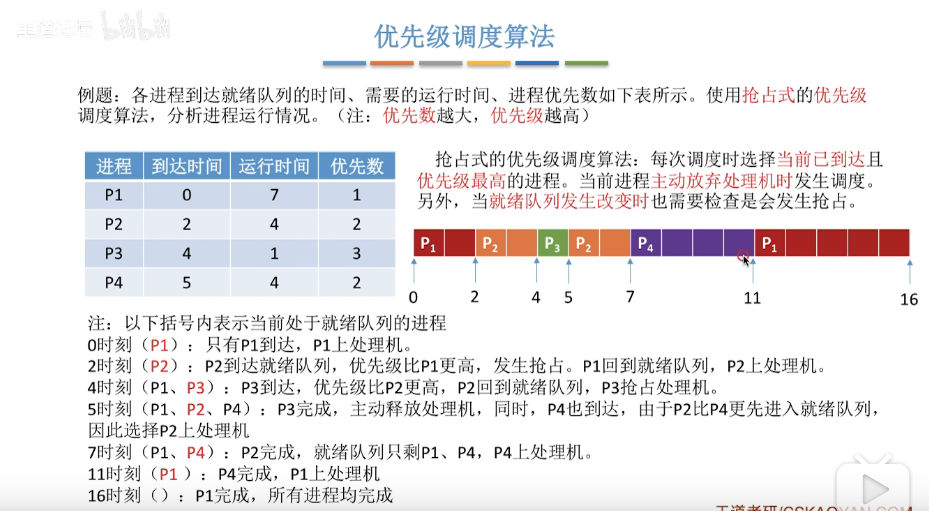
5. 优先级调度
5.1 算法思想
随着计算机的发展,特别是实时操作系统的出现,越来越多的应用场景需要根据任务的紧急程度来决定处理顺序。
5.2 算法规则
每个作业/进程有各自的优先级,调度时选择优先级最高的作业/进程
5.3 用于作业/进程调度
都可以。甚至,还会用于I/O调度中。
5.4 是否可抢占
抢占/非抢占都有。区别在于非抢占式只需在进程主动放弃处理机时进行调度即可,而抢占式还需在就绪队列变化时,检查是否会发生抢占。
5.5 优缺点
- 用优先级区分紧急程度,重要程度,适用于实时操作系统。可灵活的调整对各种作业/进程的偏好程度。
- 若源源不断地有高优先级进程到来,则可能导致饥饿。
5.6 是否会导致饥饿
会
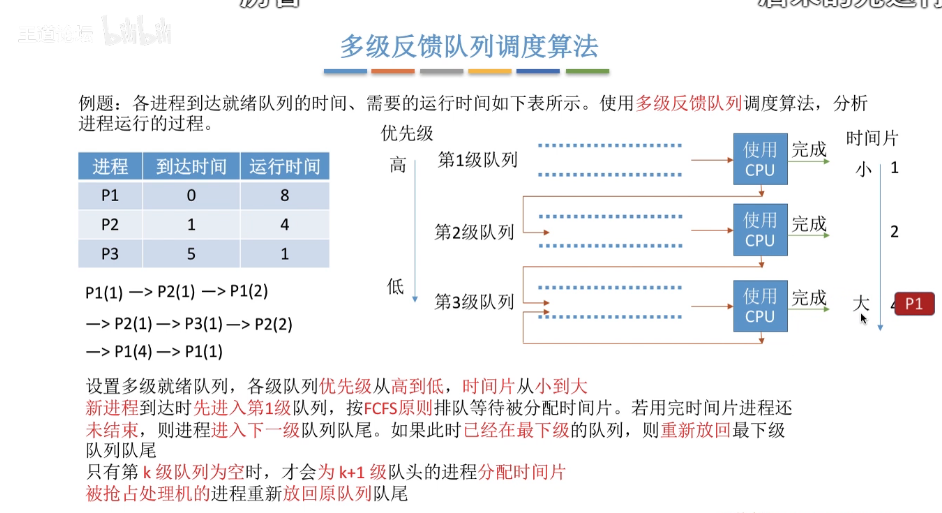
6. 多级反馈队列
6.1 算法思想
对其他调度算法的折中权衡。
6.2 算法规则
- 设置多级就绪队列,各级队列优先级从高到低,时间片从小到大
- 新进程到达时先进入第一队列……
- 只有第k即队列为空时,才会为第 k+1 级对头的进程分配时间片
6.3 用于作业/进程调度
用于进程调度。
6.4 是否可抢占
抢占式的算法。在k级队列的进程运行过程中,若更上级的队列(1-【k-1】级)中进入了一个新进程,则由于新进程处于优先级更高的队列中,因此新进程会抢占处理机,原来运行的进程放回k级队列队尾。
6.5 优缺点
- 对各类型进程相对公平(FCFS优点)
- 每个新到达的进程都可以很快得到相应(RR的优点)
- 短进程只用较少的时间就可完成(SPF的优点)
- 不必实现估计进程的运行时间(避免用户作假)
- 可灵活地调整对各类进程的偏好程度,比如CPU密集型进程,I/O密集型进程
6.6 是否会导致饥饿
会
7.例题解析
7.1 先来先服务

7.2 短作业优先
7.2.1 最短时间剩余
7.3 高响应比
7.4 时间片轮转
7.5 优先级调度
7.6 多级反馈队列
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/187911.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
