大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
目前个人初步接触视觉SLAM开发相关工作,现在就相关学习做一些总结以加深个人理解,同时也希望能给其他网友提供一些帮助。这篇文章主要是对之前关于视觉SLAM方案和硬件选型调研的总结,文中有关的视频是从youtube上收集的,上传到了百度网盘(链接:https://pan.baidu.com/s/1-5B4q1rtL3XcCEIDzou0JA 密码:lfm1),有需自取。由于个人能力有限,不保证文中说法的准确性,更多的是互相交流学习。
一、SLAM的引入
1.1定义
SLAM 是 Simultaneous Localization and Mapping 的缩写,中文译作“同时定位与地图构建”。它是指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。如果这里的传感器主要为相机,那就称为“视觉 SLAM”。
1.2开发背景

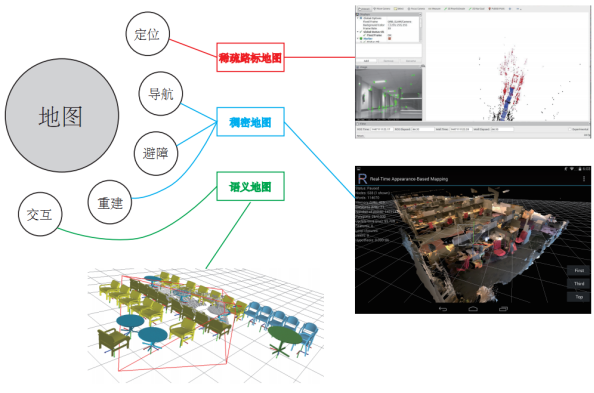
图1-1 SLAM中建图的分类与作用
引入SLAM的主要目的如下:
1)建图。使用SLAM可在传感器具有良好表现的环境下建立精度较高的全局地图,建立好的地图会为后面的定位、导航等功能提供服务。
2)定位。视觉SLAM中可通过帧间数据匹配计算相机的相对变换,对应的就是机器人的位姿信息
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/187237.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
