大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
标题
本人目前是一个大一菜鸟,最近在学编码器方面的知识,希望我的经验对你有些帮助。
分享一下霍尔编码器电机的使用与测速,我用的是25GA-310直流减速电机。先来看一下最基本的
接线方法——-
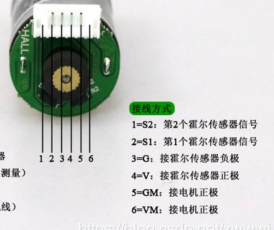

测速原理
##测速原理
这里需要用到一些基本函数,大家可以去相关网站去找一下,重要的是定时器函数和中断函数
我用的这个电机脉冲数双相300个,单相150个。(电机的型号不同可能会不一样,如果店家那没有的话可以抠出来下面一部分程序测)
具体思路:首先使用定时器定时一个时间,我这里用的是50ms。编码器转一圈会发送脉冲,一个脉冲可以产生一个中断,在中断函数里令一个变量自加,每产生一个脉冲该变量就加1。所以该变量就是脉冲数。
通过50ms内产生得脉冲数就可以算出速度了(这里是角速度,如果要具体算速度的话乘以轮子半径即可)。用脉冲数/150( 这里用单相或者双相都一样,我用的单相得)即可得到在这50ms内电机转动得圈数。再乘以20就是一秒内转的圈数,再乘以60就是一分钟转的圈数 。 下面是代码
打开串口绘图器即可观察数据(打印函数一定要用 Serial.println()才可以显示哦)
#include <TimerOne.h>
float v;
volatile long counter_val0=0;
volatile long counter_val1=0; //该变量用于存储编码器的值,所以用类型修饰符volatile;
int j=0; //定时器标志;
void setup()
{
delay(2000);
pinMode(2, INPUT);
pinMode(3, INPUT); //设置为输入模式,并且2,3号引脚是中断口0,1;
Serial.begin(115200); //初始化波特率为115200
attachInterrupt(0, counter0, RISING);//设置编码器A相位上升沿中断
attachInterrupt(1, counter1, RISING);//设置编码器B相位上升沿中断
Timer1.initialize(50000); // 设置定时器中断时间,单位微秒 ,这里是50毫秒
Timer1.attachInterrupt( timerIsr ); // 打开定时器中断
interrupts(); //打开外部中断
}
void loop()
{
long lTemp = 0; //定义临时存储数据变量
if(j==1) //判断是否发生定时器中断,这里是50ms发生一次
{
j=0; //清除标记
}
}
//外部中断处理函数
void counter0()
{
counter_val0++; //每一个中断加一
}
void counter1()
{
counter_val1++; //每一个中断加一
}
//定时器中断处理函数
void timerIsr()
{
j=1; //定时时间达到标志
v=60*20*counter_val0/150.0; //这里的单位是转每分钟:r/min
Serial.println(v);
counter_val0=0;
counter_val1=0; //清空该时间段内的脉冲数
return v;
}
PID
如果有对PID算法感兴趣的我们可以讨论下,根据编码器测速写了一个控制电机速度的算法,但是参数我还没调出来。下面是源代码。如果有错误希望大佬们给我提醒一下
#include <TimerOne.h>
#define set_point 100
float v;
long counter_val0=0;
long counter_val1=0;
int j=0;
void setup()
{
delay(2000);
pinMode(2, INPUT);
pinMode(3, INPUT);
pinMode(8,OUTPUT);
pinMode(9,OUTPUT); //启用电机A的三个管脚,全部设置为输出状态
digitalWrite(9, LOW); //松开电机A的制动
digitalWrite(8, HIGH); //设置方向为正向旋转
Serial.begin(115200);//初始化波特率为115200
attachInterrupt(0, counter0, RISING);//设置编码器A相位上升沿中断
attachInterrupt(1, counter1, RISING);//设置编码器B相位上升沿中断
Timer1.initialize(50000); // 设置定时器中断时间,单位微秒
Timer1.attachInterrupt( timerIsr ); // 打开定时器中断
interrupts(); //打开外部中断
}
void loop()
{
long lTemp = 0; //定义临时存储数据变量
if(j==1) //判断是否发生定时器中断,即定时时间是否到达
{
j=0; }
int v1=(int)v;
analogWrite(9,PIDControl_L(50,v1));
analogWrite(8,0);
}
//外部中断处理函数
void counter0()
{
counter_val0++; //每一个中断加一
}
void counter1()
{
counter_val1++; //每一个中断加一
}
//定时器中断处理函数
void timerIsr()
{
j=1; //定时时间达到标志
v=1200*counter_val0/150.0;
Serial.println(v);
counter_val0=0;
counter_val1=0;
return v;
}
float PIDControl_L(int SpeedSet,int speed) //pid
{
float Kp=50,Ki=9,kd=0.1;
float cap;
int e=0,e1=0,e2=0;
static float PwmControl;
static float pwm;
e2=e1;
e1 = e;
e=SpeedSet-speed;
PwmControl+=Kp *(e-e1)+ Ki*e+kd*(e-2e1+e2);
pwm=map(PwmControl,0, 60, 0, 255);
cap = pwm;
return pwm;
}
`
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/187028.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
