大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
第1节 Q-learning逐步教程
本教程将通过一个简单但又综合全面的例子来介绍Q-learning 算法。该例子描述了一个利用无监督训练来学习未知环境的agent。
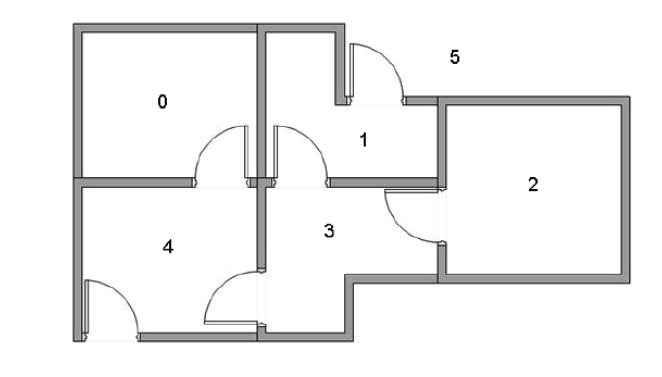
假设一幢建筑里面有5个房间,房间之间通过门相连。我们将这五个房间按照从0至4进行编号,且建筑的外围可认为是一个大的房间,编号为5。房间结构如下图:

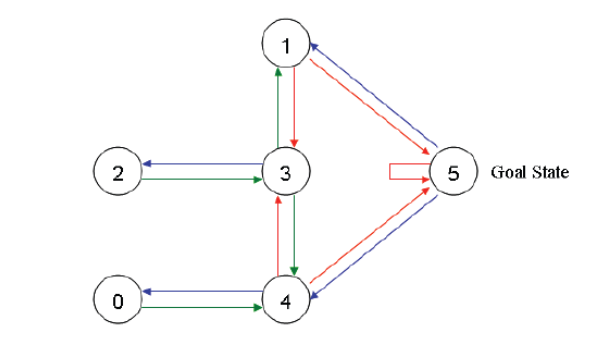
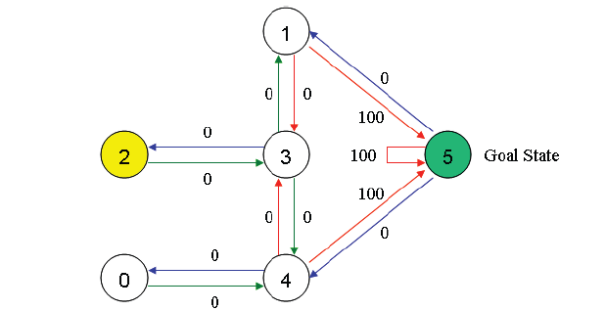
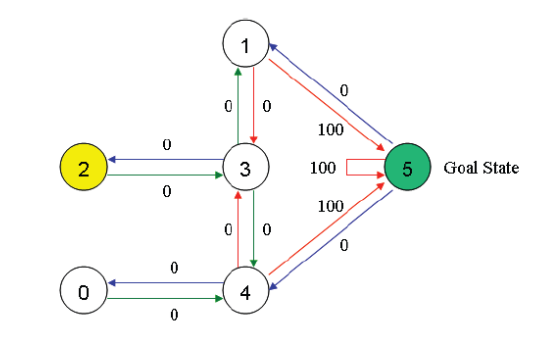
上图的房间也可以通过一个图来表示,房间作为图的节点,两个房间若有门相连,则相应节点间对应一条边。如下图所示:
对于这个例子,我们首先将agent置于建筑中的任意一个房间,然后从那个房间开始让其走到建筑外,那是我们的目标房间(即编号为5的房间)。为了将编号为5的房间设置为目标,我们为每一扇门(即相应的边)关联一个reward值:直接连接到目标房间的门的reward值为100,其他门的rewad值为0。因为每一扇门都有两个方向(如由0号房间可以去4号房间,而由4号房间也可以返回0号房间),因此每一个房间上指定两个箭头(一个指进一个指出),且每个箭头上带有一个reward值。如下图所示:
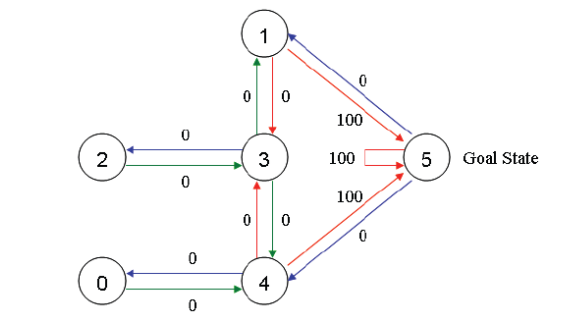
注意,编号为5的房间有一个指向自己的箭头,其reward值为100,其他直接指向目标房间的边的reward值也为100。Q-learning的目标是达到reward值最大的state,因此当 agent到达目标房间后将永远停留在那里。这种目标也称为“吸收目标”。
想象一下,我们的agent 是一个可以通过经验进行学习的“哑巴虚拟机器人”,它可以从个房间走到另一个房间,但是它不知道周边的环境,也不知道怎样走到建筑的外面去。
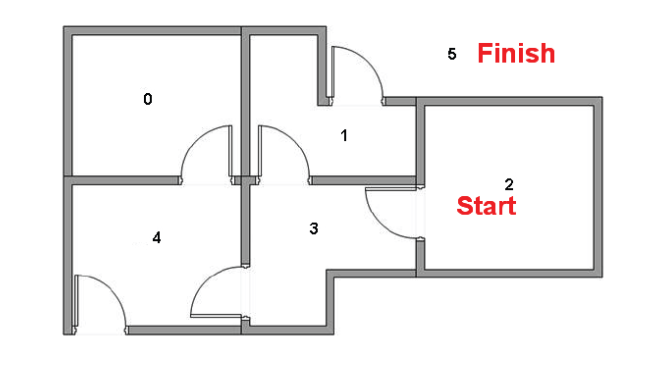
下面我们想对agent 从建筑里的任意房间的简单撤离进行建模。假定现在agent 位于 2号房间,我们希望agent通过学习到达5号房间。
Q-Learning算法中有两个重要术语:“状态(state)”和“行为(action)”。
我们将每一房间(包括5号房间)称为一个“状态”,将agent从一个房间走到另外一个房间称为一个“行为”。在图中一个“状态”对应一个节点,而一种“行为”对应一个箭头。
假设agent当前处于状态2。从状态2它可以转至状态3(因为状态2到状态3有边相连)。但从状态2不能转至状态1(因为状态2到状态1没边相连)。类似地,我们还有
- 从状态3,它可以转至状态1和4,也可以转回至状态2。
- 从状态4,它可以转至状态0,5和3。
- 从状态1,它可以转至状态5和3。
- 从状态0,它只能转至状态4。
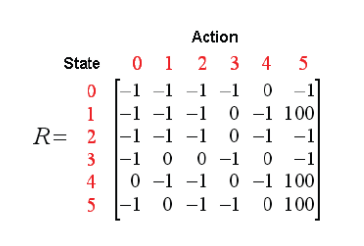
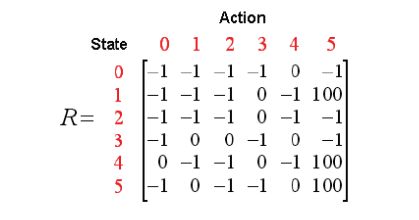
我们可以以状态为行,行为为列,构建一个关于reward值的矩阵R,其中的-1表示空值(相应节点之间没有边相连)。reward值矩阵R如下图:
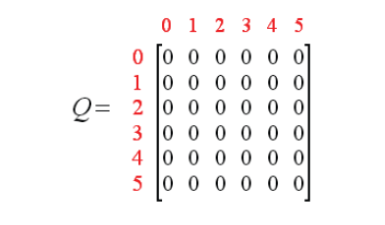
类似地,我们也可以构建一个矩阵Q,它用来表示agent已经从经验中学到的知识,矩阵Q与R是同阶的,其行表示状态,列表示行为。
由于刚开始时agent对外界环境一无所知,因此矩阵Q应初始化为零矩阵。为简单起见,在本例中我们假设状态的数目是已知的(等于6)。对于状态数目未知的情形,我们可以让Q从一个元素出发,每次发现一个新的状态时就可以在Q中增加相应的行列。
Q-learning算法的转移规则比较简单,如下式所示:

其中s,a表示当前的状态和行为,s~,a~表示s的下一个状态及行为,学习参数γ为满足
0≤γ<1的常数。
在没有老师的情况下,我们的agent将通过经验进行学习(也称为无监督学习),它不断从一个状态转至另一状态进行探索,直到到达目标。我们将agent的每一次探索称为一个 episode。在每一个episode中,agent从任意初始状态到达目标状态,当agent达到目标状态后,一个episode即结束,接着进入另一个episode。
下面给出整个Q-learning算法的计算步骤
算法1.1(Q-learning 算法)
Step1给定参数γ和reward矩阵R
Step2令Q=0
Step 3 For each episode:
3.1随机选择一个初始的状态s
3.2若未达到目标,状态则执行以下几步
(1)在当前状态的所有可能行为中选取一个行为a
(2)利用选定的行为a得到下一个状态s~
(3)按照 转移规则公式计算 Q(s,a)
(4)令s:=s~
Agent利用上述算法从经验中进行学习。每一个episode 相当于一个 training session。在一个training session中,agent探索外界环境,并接收外界环境的reward,直到达到目标状态。训练的目的是要强化agent的“大脑”(用Q表示)。训练得越多,则Q被优化得更好。当矩阵Q被训练强化后,agent便很容易找到达到目标状态的最快路径了。
公式中的γ满足0≤γ<1。趋向于0表示agent主要考虑immediate reward,而趋向于1表示agent将同时考虑future rewards。
利用训练好的矩阵Q,我们可以很容易地找出一条从任意状态s0出发达到目标状态的行为路径,具体步骤如下:
1.令当前状态s:=s0
2.确定a, 它满足 Q(s,a) =max{Q(s,a~)}
3.令当前状态s:=s~(s~表示a对应的下一个状态)
4.重复执行步2和步3直到s成为目标状态
第2节 Q-learning手工推演
为进一步理解上一节中介绍的Q-learning算法是如何工作的,下面我们一步一步地选代几个episode。
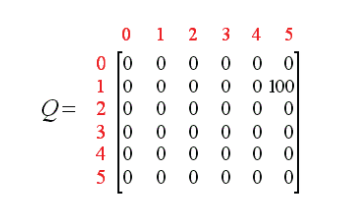
首先取学习参数γ=0.8,初始状态为房间1,并将Q初始化为一个零矩阵。如下图所示:
观察矩阵R的第二行(对应房间1或状态1),它包含两个非负值,即当前状态1的下步行为有两种可能:转至状态3或转至状态5。随机地,我们选取转至状态5。
想象一下,当我们的agent位于状态5以后,会发生什么事情呢?观察矩阵R的第6 行(对应状态5),它对应三个可能的行为转至状态1,4或5。根据公式,我们有
Q(1,5)= R(1,5)+0.8*max{Q(5,1),Q(5,4),Q(5.5)}
=100 +0.8*max(0,0,0)
=100
现在状态5变成了当前状态。因为状态5即为目标状态故一次episode便完成了,至此agent的“大脑”中的Q矩阵刷新为
接下来,进行下一次episode的迭代,首先随机地选取一个初始状态,这次我们选取状态3作为初始状态。
观察矩阵R的第四行(对应状态3),它对应三个可能的行为:转至状态1,2或4。随机地,我们选取转至状态1。因此观察矩阵R的第二行(对应状态1),它对应两个可能的行为:转至状态3或5。根据公式我们有
Q(3,1)=R(3,1)+0.8*max{Q(1,3),Q(1,5)}
=0+0.8*max{0,100}
=80
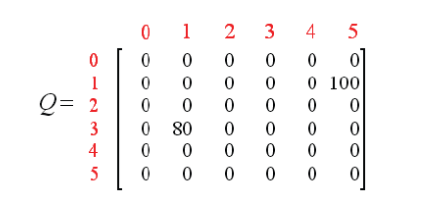
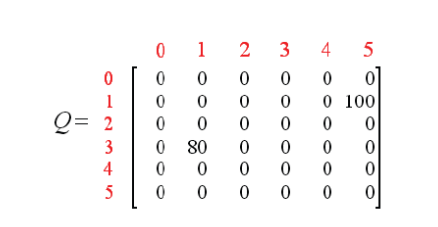
注意上式中的Q(1,5)用到了上图中的刷新值。此时矩阵Q变为
现在状态1变成了当前状态。因为状态1还不是目标状态,因此我们需要继续往前探索。状态1对应三个可能的行为:转至状态3或5。不妨假定我们幸运地选择了状态5。
此时,同前面的分析一样,状态5有三个可能的行为:转至状态1,4或5。根据公式我们有
Q(1,5)=R(1,5)+0.8*max{Q(5,1),Q(5,4),Q(5,5)}
=100+0.8*max{0,0,0}
=100
注意,经过上一步刷新,矩阵Q并没有发生变化。
因为状态5即为目标状态,故这 一次episode 便完成了,至此agent “大脑”中的Q矩阵刷新为
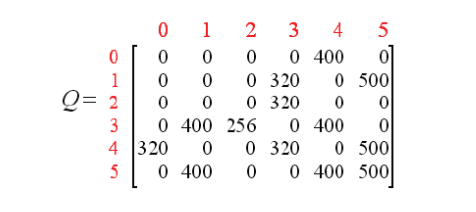
若我们继续执行更多的episode,矩阵Q将最终收敛成
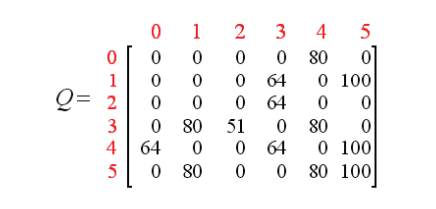
对其进行规范化,每个非零元素都除以矩阵Q的最大元素(这里为500),可得(这里省略了百分号)
一旦矩阵Q足够接近于收敛状态,我们的agent便学习到了转移至目标状态的最佳路径。只需按照上一节结尾时介绍的步骤,即可找到最优的路径。如下图所示:
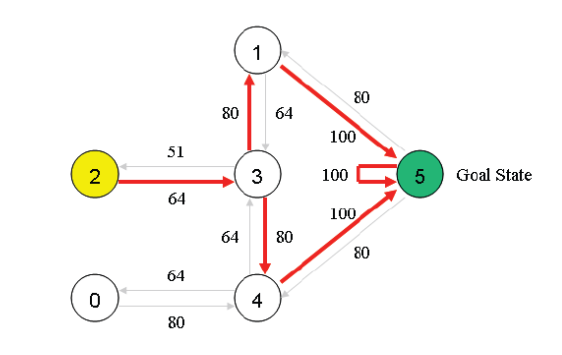
例如,从2为初始状态,利用Q,可得
- 从状态2,最大Q元素值指向状态3;
- 从状态3,最大Q元素值指向状态1或4(这里假设我们随机地选择了1);
- 从状态1,最大Q元素值指向状态5。
因此最佳路径的序列为2-3-1-5。
参考资料
1.https://blog.csdn.net/itplus/article/details/9361915
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/186511.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
