大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
文章(一)
一阶惯性环节采用后置反馈的方式可以实现较精确的系统跟踪性能。
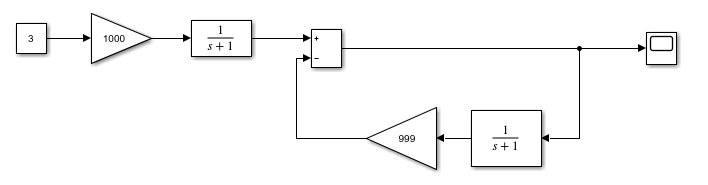

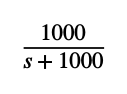
上述系统的传递函数为
因此启动性能良好,另,一阶惯性环节无超调量,因此可通过修改反馈参数实现最优的跟踪性能。因此在针对温度等变化较小的物理量方面的控制上是较占优势的,但精确跟踪也就意味着出现高频干扰、低频干扰、白噪声时,传感器也会精确地将这些干扰输出。这对一些容易受到干扰的系统是极为不利的。
如下图为加入高频正弦信号后上述系统的输出(幅值为1,频率为1000(rad/sec))
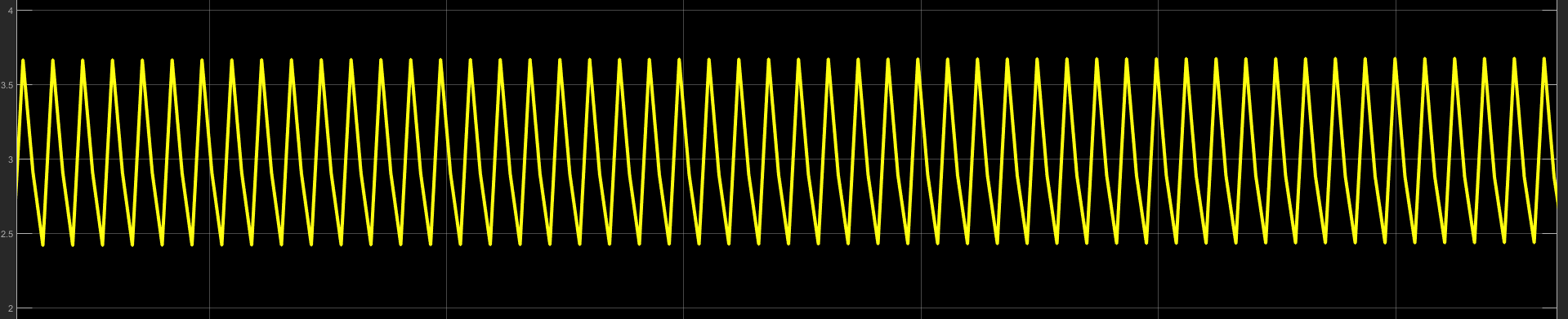
可见,系统虽然有一定的滤波性能(正弦输出幅值小于1),但对于高次谐波而言,滤波能力实为有限。
如下图为加入低频正弦信号后上述系统的输出(幅值为1,频率为1(rad/sec))
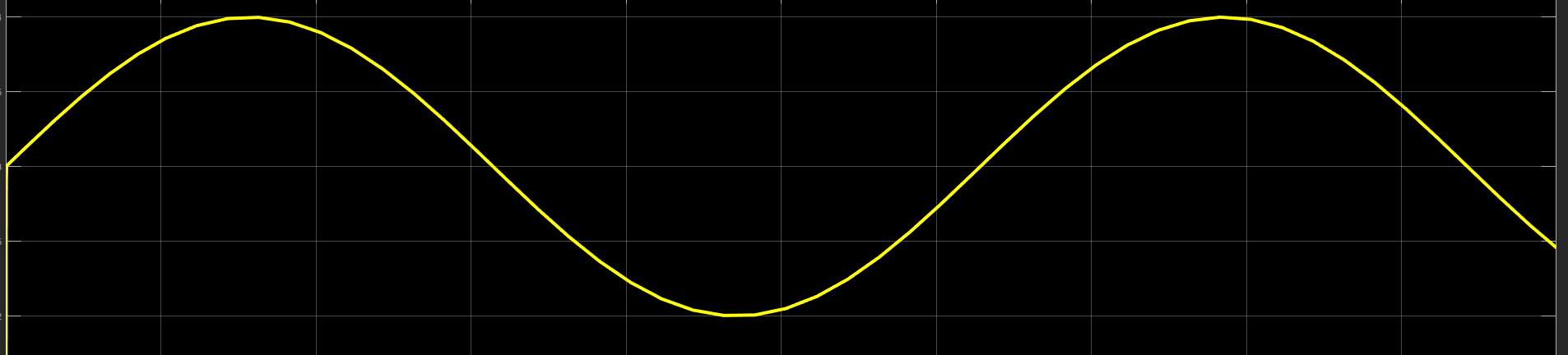
针对上述情况,就需要设计一个带滤波的信号跟踪模型。
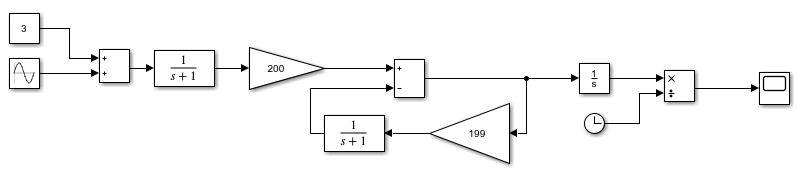
第一种设计路线:平均法,将上述图中输出信号进行积分,然后求本段平均值作为输出值,模型如下图:
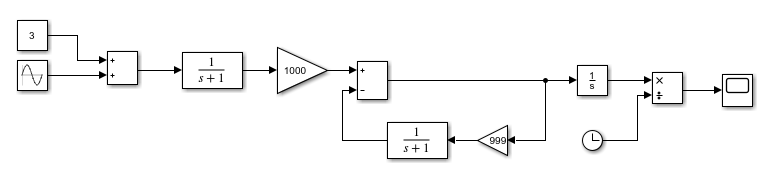
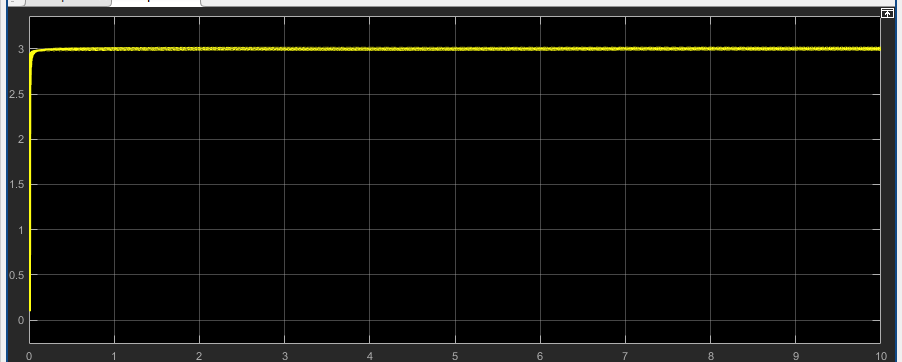
仿真结果如下图
 频率为70Hz时
频率为70Hz时
 频率为320Hz时
频率为320Hz时
可见,平均法启动速度快,对高频谐波的滤除效果良好。
未完待续。。。。。。。
文章(二)
由文章(一)可见,平均法启动速度快,对高频干扰信号的滤除效果良好。但对低频干扰的滤除效果有限。
因此,本节采用二次平均法来缓解这个问题,如图
将文章(一)中输出信号与传感器直接输出信号加权平均,最后得出相应的输出信号,如下图
该方法改善了平均法滤除低频干扰时超调的影响,但仍然未能完全滤除低频干扰。
可在该信号后再次平均以改善输出信号,读者可自行尝试。
另:可采用传感器输出信号的微分信号作为参考,以该微分信号的大小进行分区分段控制,或可取得不错的效果
文章(三)
由文章(二)可知,二次平均法改善了一次平均法滤除低频干扰时超调的影响,但仍然未能完全滤除低频干扰。在启动过程尤为严重
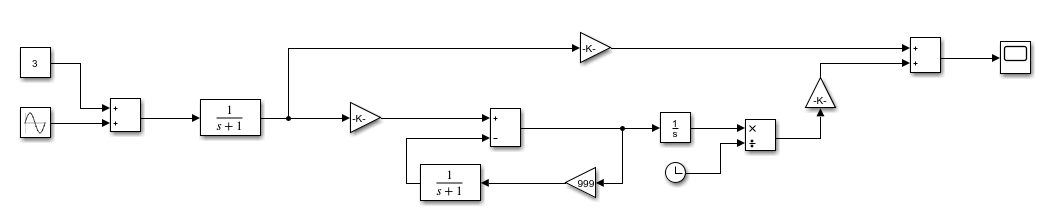
因此,通过改变反馈控制系统参数结合平均法是一个不错的选择,仿真如图:
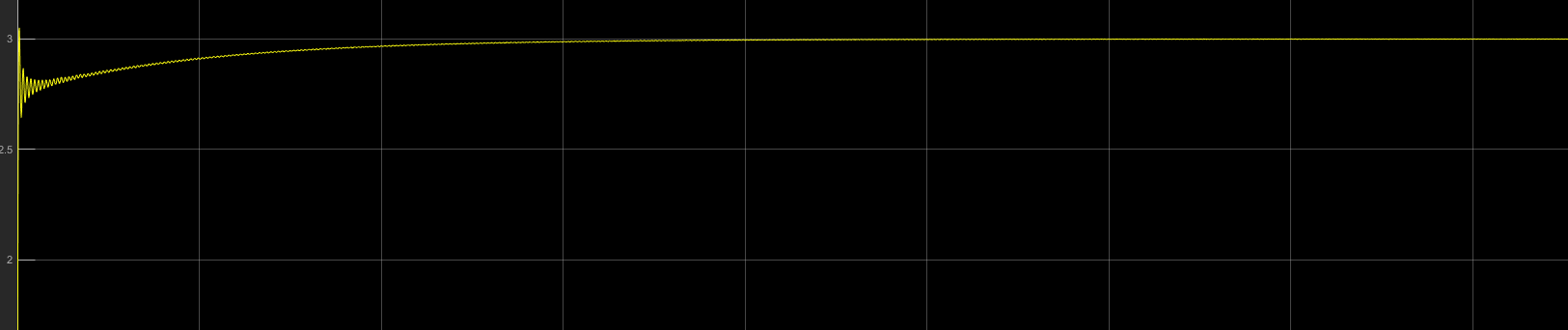
通过改变比例系数,可以实现一定的滤波效果,此方法是通过降低响应参数的方式实现一级滤波,通过平均法实现二级滤波,仿真结果如下图:

文章《一阶惯性传感器的快速跟踪性能实现》中,最终传递函数为:
本例中,传递函数为
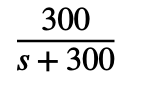
启动性能与文章《一阶惯性传感器的快速跟踪性能实现》中接近,且较大地滤除了高频、低频干扰
可见,该控制方式可以兼顾启动速度与稳态性能。滤波、启动效果俱佳。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/185770.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
