大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
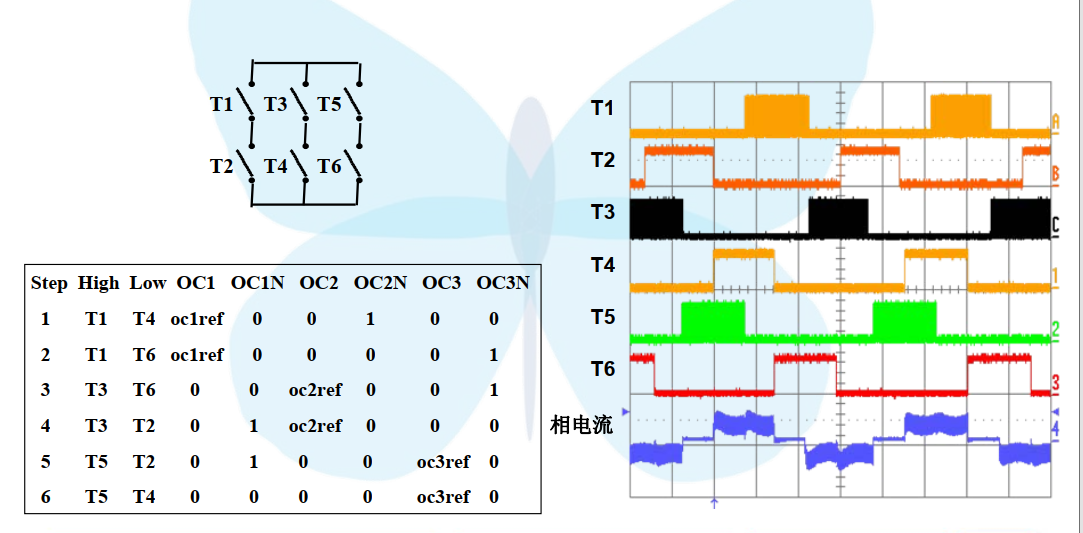
一、STM32F103驱动无刷直流电机基本思路
无刷电机控制是基于6步换相法如下图所示:

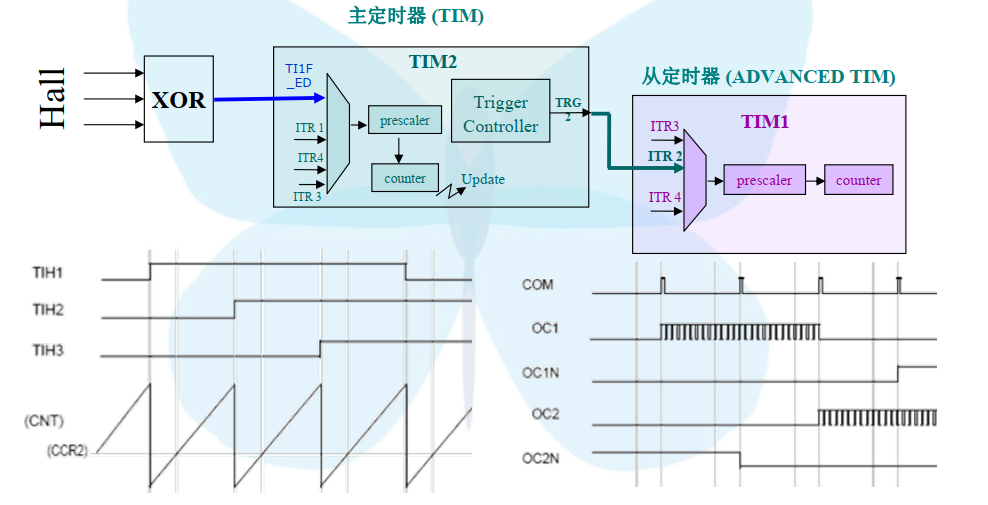
二、STM32F103驱动无刷直流电机方法介绍
通常我们用的方法是使用高级定时器3通道互补输出去驱动mos管,用通用定时器连接霍尔传感器去触发中断,在中断中换相,基本原理如下图所示:
三、驱动代码编写
/********************************************************************** * Description : None * Input : None * Output : None * Return : None * Attention : None **********************************************************************/
void BLDC_GPIOConfig(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_9|GPIO_Pin_10; //TIM1输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;//TIM1输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; //TIM3的霍尔输入
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //TIM3的霍尔输入
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
/********************************************************************** * Description : None * Input : None * Output : None * Return : None * Attention : None **********************************************************************/
void BLDC_TIM1Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //基本结构体变量定义
TIM_OCInitTypeDef TIM_OCInitStructure; //输出结构体变量定义
TIM_BDTRInitTypeDef TIM_BDTRInitStructure; //死区刹车结构体变量定义
TIM_DeInit(TIM1);
TIM_TimeBaseStructure.TIM_Prescaler = 2; //TIM基本初始化
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_CenterAligned2;//中央对齐计数模式
TIM_TimeBaseStructure.TIM_Period = 1499; //PWM 16K
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //TIM输出通道初始化
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Disable;
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable;
TIM_OCInitStructure.TIM_Pulse =1200;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Reset;
TIM_OC1Init(TIM1,&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_Pulse =1200;
TIM_OC2Init(TIM1,&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_Pulse =1200;
TIM_OC3Init(TIM1,&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //TIM输出通道4初始化,用来触发AD注入采样
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Disable;
TIM_OCInitStructure.TIM_Pulse =1495;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC4Init(TIM1,&TIM_OCInitStructure);
TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable; //死区刹车初始化
TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable;
TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_OFF;
TIM_BDTRInitStructure.TIM_DeadTime = 100;
TIM_BDTRInitStructure.TIM_Break = TIM_Break_Disable; //如打开,开机无输出且状态紊乱????
TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_Low;
TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Disable;
TIM_BDTRConfig(TIM1,&TIM_BDTRInitStructure);
TIM_OC1PreloadConfig(TIM1,TIM_OCPreload_Enable); //使能捕获比较寄存器预装载(通道1)
TIM_OC2PreloadConfig(TIM1,TIM_OCPreload_Enable); //使能捕获比较寄存器预装载(通道2)
TIM_OC3PreloadConfig(TIM1,TIM_OCPreload_Enable); //使能捕获比较寄存器预装载(通道3)
TIM_SelectInputTrigger(TIM1, TIM_TS_ITR2); //输入触发源选择TIM3
//TIM_SelectSlaveMode(TIM1, TIM_SlaveMode_Trigger);//从模式选择 触发
TIM_CtrlPWMOutputs(TIM1,ENABLE);
TIM_Cmd(TIM1,ENABLE);
}
/********************************************************************** * Description : None * Input : None * Output : None * Return : None * Attention : None **********************************************************************/
void BLDC_TIM3Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //基本结构体变量定义
TIM_ICInitTypeDef TIM_ICInitStructure; //定义结构体变量
TIM_OCInitTypeDef TIM_OCInitStructure; //输出结构体变量定义
TIM_DeInit(TIM3);
TIM_TimeBaseStructure.TIM_Prescaler = 71; //TIM基本初始化
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_Period =65535;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择通道1
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //输入上升沿捕获
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_TRC; //配置通道为输入,并映射到哪里
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //输入捕获预分频值
TIM_ICInitStructure.TIM_ICFilter = 10; //输入滤波器带宽设置
TIM_ICInit(TIM3, &TIM_ICInitStructure); //输入通道配置
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //TIM输出通道初始化
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse =1023;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC2Init(TIM3,&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Timing; //TIM输出通道初始化
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Disable;
TIM_OCInitStructure.TIM_Pulse =65535;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC4Init(TIM3,&TIM_OCInitStructure);
TIM_SelectHallSensor(TIM3,ENABLE); //使能TIMx的霍尔传感器接口
TIM_SelectInputTrigger(TIM3, TIM_TS_TI1F_ED); //输入触发源选择
TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset); //从模式选择
TIM_SelectMasterSlaveMode(TIM3, TIM_MasterSlaveMode_Enable);//主从模式选择
TIM_SelectOutputTrigger(TIM3, TIM_TRGOSource_OC2Ref); //选择输出触发模式(TRGO端)
TIM_ITConfig(TIM3, TIM_IT_Trigger|TIM_IT_CC4, ENABLE); //开定时器中断
//TIM_Cmd(TIM3,ENABLE);
}
/********************************************************************** * Description : None * Input : None * Output : None * Return : None * Attention : None **********************************************************************/
void huanxiang(void)
{
u8 irq_zhuanzi;
irq_zhuanzi=(u8)((GPIOA->IDR&0x000000c0)>>6); //读转子位置
irq_zhuanzi|=(u8)((GPIOB->IDR&0x00000001)<<2);
if(zheng_fan==RESET)
{
//正转
switch(irq_zhuanzi) //根据转子位置,决定CCER输出相位和转子字偏移量
{
/* case 0x01:{ TIM1->CCER=0x3081; //1,4 };break; case 0x03:{ TIM1->CCER=0x3180; //4,5 };break; case 0x02:{ TIM1->CCER=0x3108; //2,5 };break; case 0x06:{ TIM1->CCER=0x3018; //2,3 };break; case 0x04:{ TIM1->CCER=0x3810; //3,6 };break; case 0x05:{ TIM1->CCER=0x3801; //1,6 };break; default:break; */
case 0x05:{
TIM1->CCER=0x3081; //1,4
};break;
case 0x04:{
TIM1->CCER=0x3180; //4,5
};break;
case 0x06:{
TIM1->CCER=0x3108; //2,5
};break;
case 0x02:{
TIM1->CCER=0x3018; //2,3
};break;
case 0x03:{
TIM1->CCER=0x3810; //3,6
};break;
case 0x01:{
TIM1->CCER=0x3801; //1,6
};break;
default:break;
}
}
else
{
//反转
switch(irq_zhuanzi) //根据转子位置,决定CCER输出相位和转子字偏移量
{
case 0x01:{
TIM1->CCER=0x3810;
};break;
case 0x05:{
TIM1->CCER=0x3018;
};break;
case 0x04:{
TIM1->CCER=0x3108;
};break;
case 0x06:{
TIM1->CCER=0x3180;
};break;
case 0x02:{
TIM1->CCER=0x3081;
};break;
case 0x03:{
TIM1->CCER=0x3801;
};break;
default:break;
}
}
}
/**************启动******************/
void BLDC_Start(void)
{
TIM1->SMCR|=0x0006; //开TIM1的输入触发
TIM1->DIER=0x0040; //开TIM1的触发中断
huanxiang(); //调用换向函数,启动
TIM3->CR1|=0x0001; //开TIM3
TIM3->DIER|=0x0050; //开TIM3中断
}
void BLDC_Stop(void)
{
TIM1->SMCR&=0xfff8; //关闭TIM1的输入触发
TIM1->CCER=0; //关闭TIM1的六路输出
Delay_us(40); //延时(加死区)
TIM1->CCER=0x0ccc; //打开三路下管,进行能耗制动
while(stalling_count<1); //等待电机停止(TIM3连续溢出10次,即认为电机已停转)
TIM1->CCER=0; //关闭TIM1的六路输出,关刹车
TIM3->CR1&=0xfffe; //关闭TIM3
TIM3->CNT=0; //清TIM3的计数器
TIM3->DIER&=0xffaf; //关TIM3中断
}
/** * @brief This function handles PPP interrupt request. * @param None * @retval : None */
void TIM1_TRG_COM_IRQHandler(void)
{
TIM1->SR&=0; //清中断标志
huanxiang(); //调用换向函数
}
四、完整工程下载
点击下载完整工程
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/184788.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
