大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
1. 不同类型的角点
在现实世界中,角点对应于物体的拐角,道路的十字路口、丁字路口等。从图像分析的角度来定义角点可以有以下两种定义:
- 角点可以是两个边缘的角点;
- 角点是邻域内具有两个主方向的特征点;
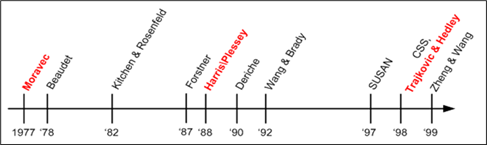
前者往往需要对图像边缘进行编码,这在很大程度上依赖于图像的分割与边缘提取,具有相当大的难度和计算量,且一旦待检测目标局部发生变化,很可能导致操作的失败。早期主要有Rosenfeld和Freeman等人的方法,后期有CSS等方法。
基于图像灰度的方法通过计算点的曲率及梯度来检测角点,避免了第一类方法存在的缺陷,此类方法主要有Moravec算子、Forstner算子、Harris算子、SUSAN算子等。

这篇文章主要介绍的Harris角点检测的算法原理,比较著名的角点检测方法还有jianbo Shi和Carlo Tomasi提出的Shi-Tomasi算法,这个算法开始主要是为了解决跟踪问题,用来衡量两幅图像的相似度,我们也可以把它看为Harris算法的改进。OpenCV中已经对它进行了实现,接口函数名为GoodFeaturesToTrack()。另外还有一个著名的角点检测算子即SUSAN算子,SUSAN是Smallest Univalue Segment Assimilating Nucleus(最小核值相似区)的缩写。SUSAN使用一个圆形模板和一个圆的中心点,通过圆中心点像素与模板圆内其他像素值的比较,统计出与圆中心像素近似的像元数量,当这样的像元数量小于某一个阈值时,就被认为是要检测的角点。我觉得可以把SUSAN算子看为Harris算法的一个简化。这个算法原理非常简单,算法效率也高,所以在OpenCV中,它的接口函数名称为:FAST() 。
2. Harris角点
2.1 基本原理
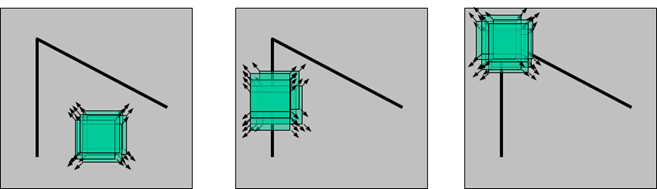
人眼对角点的识别通常是在一个局部的小区域或小窗口完成的。如果在各个方向上移动这个特征的小窗口,窗口内区域的灰度发生了较大的变化,那么就认为在窗口内遇到了角点。如果这个特定的窗口在图像各个方向上移动时,窗口内图像的灰度没有发生变化,那么窗口内就不存在角点;如果窗口在某一个方向移动时,窗口内图像的灰度发生了较大的变化,而在另一些方向上没有发生变化,那么,窗口内的图像可能就是一条直线的线段。
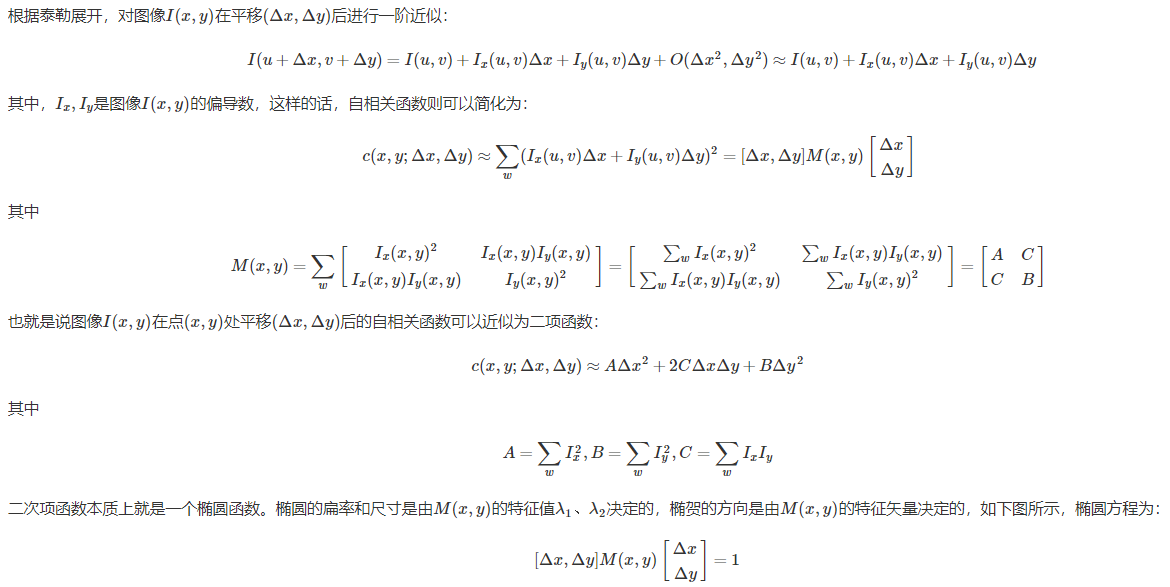
对于图像I(x,y)I(x,y),当在点(x,y)(x,y)处平移(Δx,Δy)(Δx,Δy)后的自相似性,可以通过自相关函数给出:
c(x,y;Δx,Δy)=∑(u,v)∈W(x,y)w(u,v)(I(u,v)–I(u+Δx,v+Δy))2c(x,y;Δx,Δy)=∑(u,v)∈W(x,y)w(u,v)(I(u,v)–I(u+Δx,v+Δy))2
其中,W(x,y)W(x,y)是以点(x,y)(x,y)为中心的窗口,w(u,v)w(u,v)为加权函数,它既可是常数,也可以是高斯加权函数。

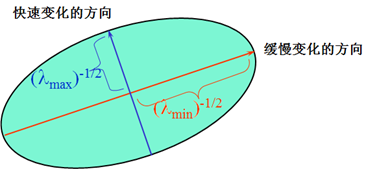
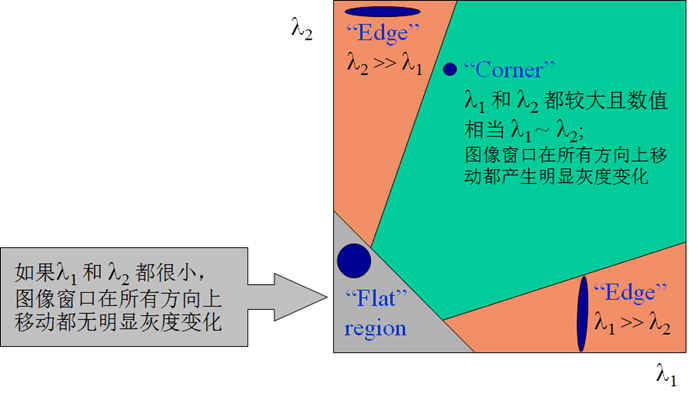
椭圆函数特征值与图像中的角点、直线(边缘)和平面之间的关系如下图所示。共可分为三种情况:
- 图像中的直线。一个特征值大,另一个特征值小,λ1≫λ2λ1≫λ2或λ2≫λ1λ2≫λ1。自相关函数值在某一方向上大,在其他方向上小。
- 图像中的平面。两个特征值都小,且近似相等;自相关函数数值在各个方向上都小。
- 图像中的角点。两个特征值都大,且近似相等,自相关函数在所有方向都增大。
-
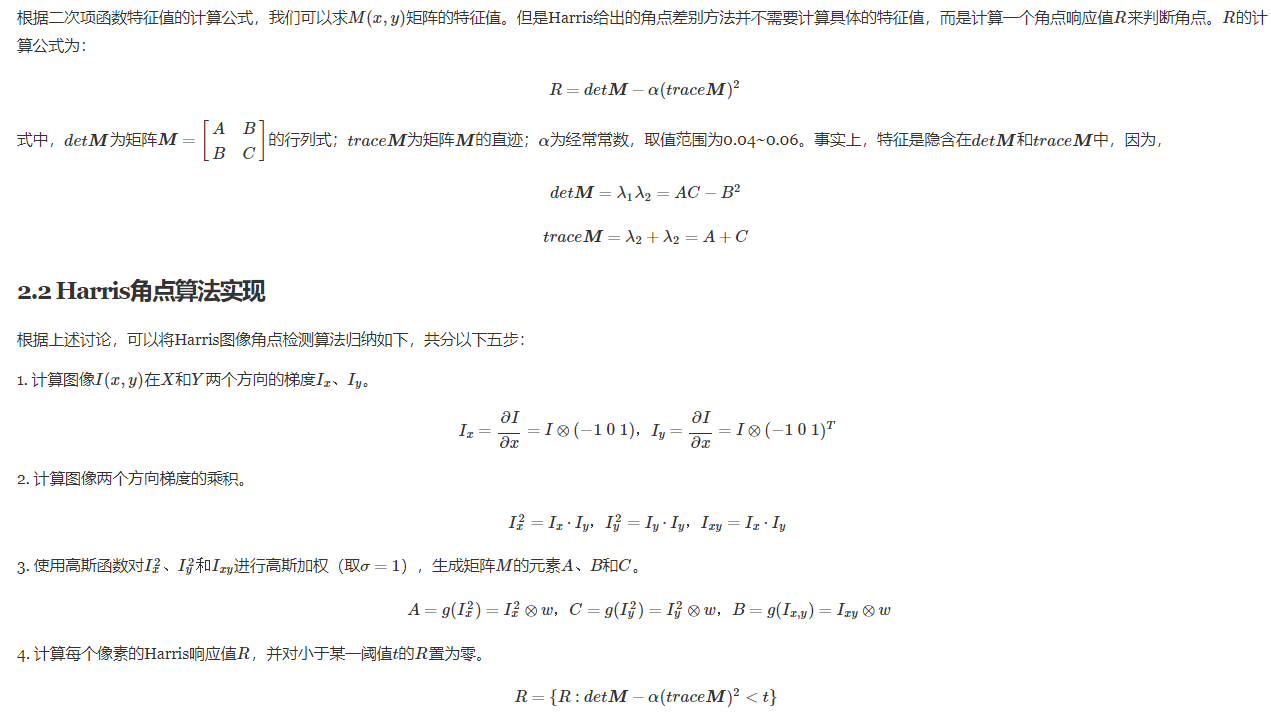
2.2 Harris角点算法实现
5. 在3×33×3或5×55×5的邻域内进行非最大值抑制,局部最大值点即为图像中的角点。
Harris角点检测的C++实现代码:https://github.com/RonnyYoung/ImageFeatures/blob/master/source/harris.cpp
2.3 Harris角点的性质
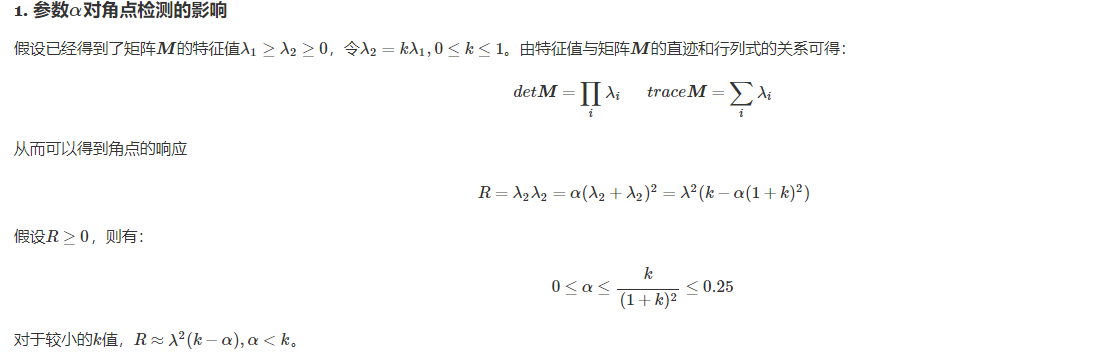
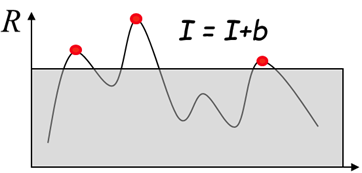
由此,可以得出这样的结论:增大αα的值,将减小角点响应值RR,降低角点检测的灵性,减少被检测角点的数量;减小αα值,将增大角点响应值RR,增加角点检测的灵敏性,增加被检测角点的数量。
2. Harris角点检测算子对亮度和对比度的变化不敏感
这是因为在进行Harris角点检测时,使用了微分算子对图像进行微分运算,而微分运算对图像密度的拉升或收缩和对亮度的抬高或下降不敏感。换言之,对亮度和对比度的仿射变换并不改变Harris响应的极值点出现的位置,但是,由于阈值的选择,可能会影响角点检测的数量。
3. Harris角点检测算子具有旋转不变性
Harris角点检测算子使用的是角点附近的区域灰度二阶矩矩阵。而二阶矩矩阵可以表示成一个椭圆,椭圆的长短轴正是二阶矩矩阵特征值平方根的倒数。当特征椭圆转动时,特征值并不发生变化,所以判断角点响应值RR也不发生变化,由此说明Harris角点检测算子具有旋转不变性。
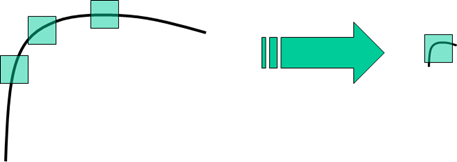
4. Harris角点检测算子不具有尺度不变性
如下图所示,当右图被缩小时,在检测窗口尺寸不变的前提下,在窗口内所包含图像的内容是完全不同的。左侧的图像可能被检测为边缘或曲线,而右侧的图像则可能被检测为一个角点。
2.4 Harris的OpenCV接口
OpenCV的Hairrs角点检测的函数为cornerHairrs(),但是它的输出是一幅浮点值图像,浮点值越高,表明越可能是特征角点,我们需要对图像进行阈值化。
C++: void cornerHarris(InputArray src, OutputArray dst, int blockSize, int apertureSize, double k, int borderType = BORDER_DEFAULT);- src – 输入的单通道8-bit或浮点图像。
- dst – 存储着Harris角点响应的图像矩阵,大小与输入图像大小相同,是一个浮点型矩阵。
- blockSize – 邻域大小。
- apertureSize – 扩展的微分算子大。
- k – 响应公式中的,参数αα。
- boderType – 边界处理的类型。
int main()
{
Mat image = imread("../buliding.png");
Mat gray;
cvtColor(image, gray, CV_BGR2GRAY);
Mat cornerStrength;
cornerHarris(gray, cornerStrength, 3, 3, 0.01);
threshold(cornerStrength, cornerStrength, 0.001, 255, THRESH_BINARY);
return 0;
}

从上面上间一幅图像我们可以看到,有很多角点都是粘连在一起的,我们下面通过加入非极大值抑制来进一步去除一些粘在一起的角点。
非极大值抑制原理是,在一个窗口内,如果有多个角点则用值最大的那个角点,其他的角点都删除,窗口大小这里我们用3*3,程序中通过图像的膨胀运算来达到检测极大值的目的,因为默认参数的膨胀运算就是用窗口内的最大值替代当前的灰度值。
int main()
{
Mat image = imread("buliding.png");
Mat gray;
cvtColor(image, gray, CV_BGR2GRAY);
Mat cornerStrength;
cornerHarris(gray, cornerStrength, 3, 3, 0.01);
double maxStrength;
double minStrength;
// 找到图像中的最大、最小值
minMaxLoc(cornerStrength, &minStrength, &maxStrength);
Mat dilated;
Mat locaMax;
// 膨胀图像,最找出图像中全部的局部最大值点
dilate(cornerStrength, dilated, Mat());
// compare是一个逻辑比较函数,返回两幅图像中对应点相同的二值图像
compare(cornerStrength, dilated, locaMax, CMP_EQ);
Mat cornerMap;
double qualityLevel = 0.01;
double th = qualityLevel*maxStrength; // 阈值计算
threshold(cornerStrength, cornerMap, th, 255, THRESH_BINARY);
cornerMap.convertTo(cornerMap, CV_8U);
// 逐点的位运算
bitwise_and(cornerMap, locaMax, cornerMap);
drawCornerOnImage(image, cornerMap);
namedWindow("result");
imshow("result", image);
waitKey();
return 0;
}
void drawCornerOnImage(Mat& image, const Mat&binary)
{
Mat_<uchar>::const_iterator it = binary.begin<uchar>();
Mat_<uchar>::const_iterator itd = binary.end<uchar>();
for (int i = 0; it != itd; it++, i++)
{
if (*it)
circle(image, Point(i%image.cols, i / image.cols), 3, Scalar(0, 255, 0), 1);
}
}现在我们得到的效果就比默认的函数得到的结果有相当的改善,如上面最右边效果图。
3. 多尺度Harris角点
3.1 多尺度Harris角点的原理
虽然Harris角点检测算子具有部分图像灰度变化的不变性和旋转不变性,但它不具有尺度不变性。但是尺度不变性对图像特征来说至关重要。人们在使用肉眼识别物体时,不管物体远近,尺寸的变化都能认识物体,这是因为人的眼睛在辨识物体时具有较强的尺度不变性。在图像特征提取:尺度空间理论这篇文章里就已经讲到了高斯尺度空间的概念。下面将Harris角点检测算子与高斯尺度空间表示相结合,使用Harris角点检测算子具有尺度的不变性。


3.2 多尺度Harris角点实现
多尺度Harris角点检测C++实现:https://github.com/RonnyYoung/ImageFeatures/blob/master/source/harrisLaplace.cpp
4. 更多的讨论
在上面描述的Harris角点具有光照不变性、旋转不变性、尺度不变性,但是严格意义上来说并不具备仿射不变性。Harris-Affine是一种新颖的检测仿射不变特征点的方法,可以处理明显的仿射变换,包括大尺度变化和明显的视角变化。Harris-Affine主要是依据了以下三个思路:
- 特征点周围的二阶矩的计算对区域进行的归一化,具有仿射不变性;
- 通过在尺度空间上归一化微分的局部极大值求解来精化对应尺度;
- 自适应仿射Harris检测器能够精确定位牲点;
这篇文章不对Harris-Affine作进一步的描述,有时间会对这一算法做专门的分析,有兴趣的可以参考原论文:Scale & Affine Invariant Interest Point Detectors.
5. 参考资料
[1] 《图像局部不变特征与描述》王永明,王贵锦。
[3] 图像特征提取PPT
[4] Harris角点检测算法 1
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/184244.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
