大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
初次设计智能小车会发现毫无头绪,无从下手。智能小车的设计主要包含两部分,硬件部分和软件部分。
硬件部分:
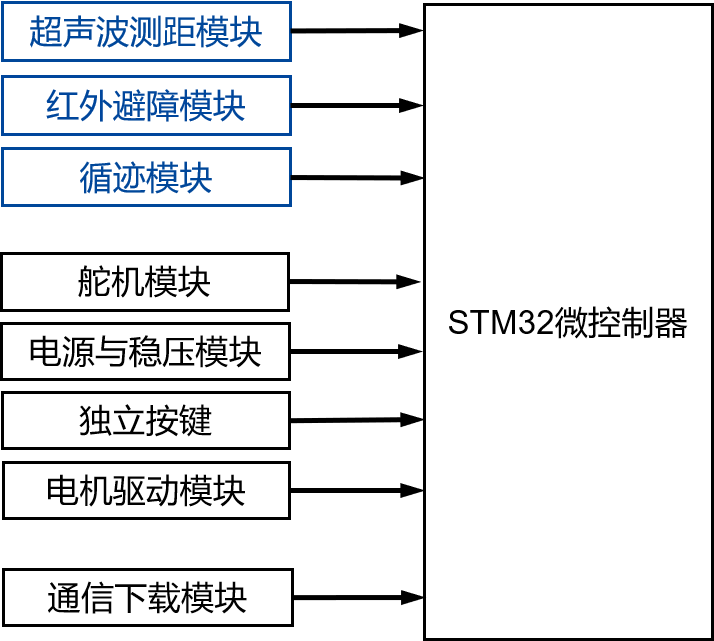
简单的说就是把微控制器(单片机)的管脚和外设的引脚用杜邦线相连,就可以使用微控制器通过自身管脚给外设发送信号,以实现外设的运行。能力较强的可以自己设计一块电路板,把微控制器和一部分外设直接插在板子上面的排座上,减少杜邦线的使用(使用杜邦线太多会比较乱),还可以在板子上设计一些必要的电路如稳压电路、按键电路、电机驱动电路,这些电路网上也能买到。如图1是小车硬件组成示例。超声波测距模块、红外避障模块、红外循迹模块、舵机模块、电机模块、通信下载模块都是网上能买到的外设。小车的硬件我就不多说了,如果想自己设计一块电路板,可以使用AD设计后,再去立创商城下单打印电路板。

软件部分:
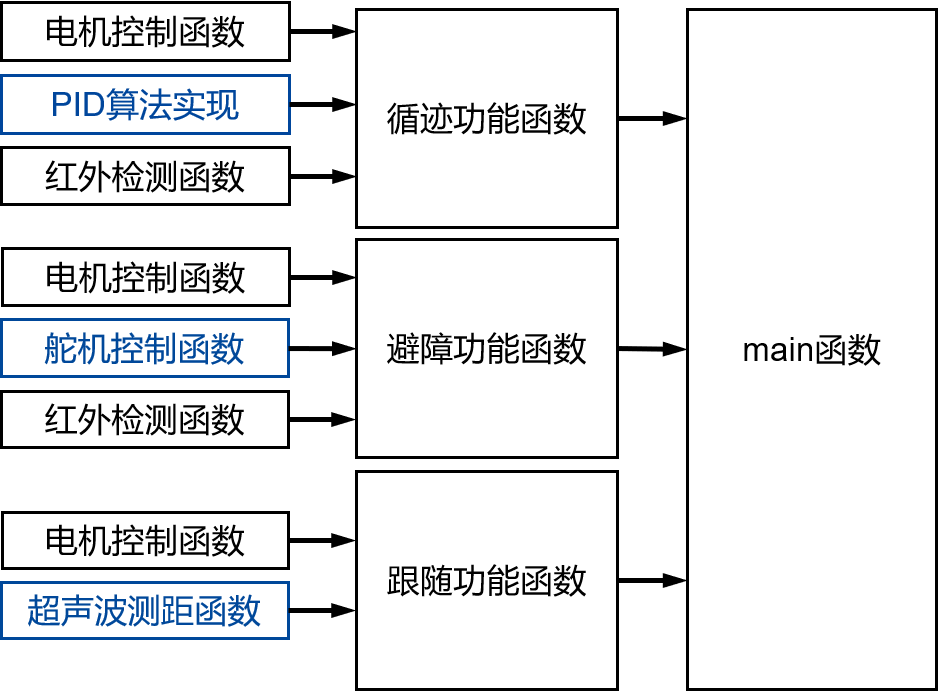
当然,必须把写好的代码烧录到微控制器中之后,微控制器才能控制外设怎么运行。代码编写属于软件部分,大部分的智能小车控制代码都能够在书籍和网络上找到。初学的时候C语言代码较为常用,C语言代码的编写方式有两种,一种是直接对寄存器操作,另一种是调用固件库(自行了解)。其实小车后期前进后退、循迹、避障的功能是否顺滑,大部分取决于代码的编写,有的时候还需要在代码中加入算法。图2是小车软件组成示例,其实就是代码的层次展示。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/184152.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
