大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
提示:若转载,请备注来源,谢谢!
文章目录
前言
题目上写的是单片机,其实不管你的板子上不上系统(FreeRtos、Linux),协议都是不变的。题外话:工作过程中,一直在移植别人写好的SPI协议,然后和外设的芯片(例如:Flash芯片、NFC芯片等)进行通信,但是都没有往底层深入的看,下午照着代码看了三个多小时,写这篇博客作为总结。
一、SPI协议的特点
SPI (Serial Peripheral Interface),是串行外围设备接口,通过这几个接口(一般4个接口,有片选、时钟、输入、输出)出来的数据遵循一定的规则,我们把这个规则叫做协议,所以就是SPI协议,可以进行高速、全双工、同步的通信。现在越来越多的外设芯片集成了这种通信协议,常见的有FLASH、AD转换器,NFC芯片等。
1. 优点
-
支持全双工,信号完整性好;
-
支持高速(100MHz以上);
-
协议支持字长不限于8bits,可根据应用特点灵活选择消息字长,(高位先行还是低位先行,需要看外设芯片的手册,主要是保证两个 SPI通讯设备之间使用同样的协定);
-
硬件连接简单;
2. 缺点
-
相比IIC多两根线,有4根线;
-
没有寻址机制,只能靠片选选择不同设备。意思就是发送数据前,要先通过IO拉低设备片选信号,然后在发送数据,操作完成后将片选信号拉高;
-
没有从设备接受ACK,主设备对于发送成功与否不得而知;
-
典型应用只支持单主控;
-
相比RS232 RS485和CAN总线,SPI传输距离短,局限于PCB板子;
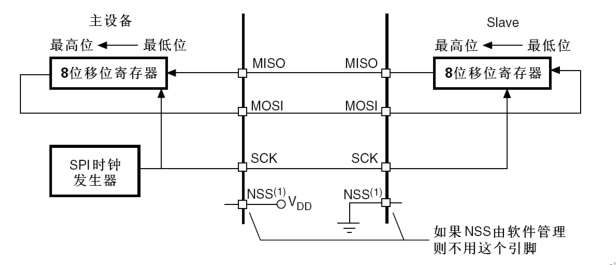
3. 结构
- 信号定义如下:
SCK: Serial Clock 串行时钟
MOSI : Master Output, Slave Input 主发从收信号
MISO: Master Input, Slave Output 主收从发信号
SS/CS : Slave Select 片选信号

二、SPI协议分析
1. 模式概念理解
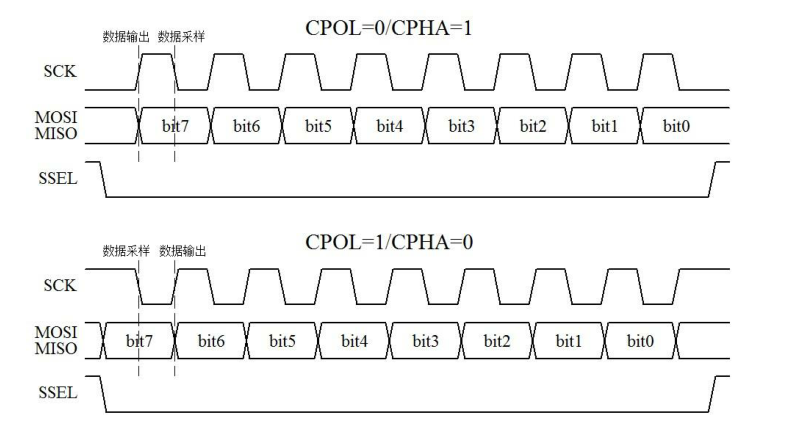
首先要知道时钟极性 CPOL”和“时钟相位 CPHA的概念,概念自行百度,根据CPOL 及 CPHA 的不同状态,SPI 分成了四种模式,若你写软SPI协议的话,一定要知道这四种模式,使用硬SPI协议的话,根据外设芯片,在初始化时,配置MCU的寄存器即可。四种模式如下:
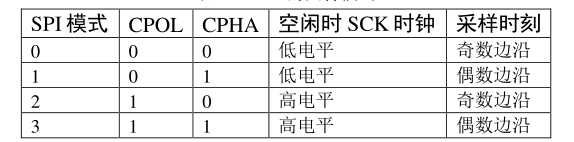
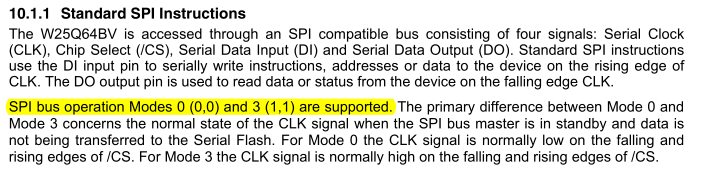
例如:W25Q64这款FLSH芯片,既支持模式0,也支持模式3,所以在MCU初始化SPI时,就可以选择这两种模式中的一种。
2. 通信过程分析
这是一张野火STM32F103手册上的图片,我们参考这种图片来分析通信过程
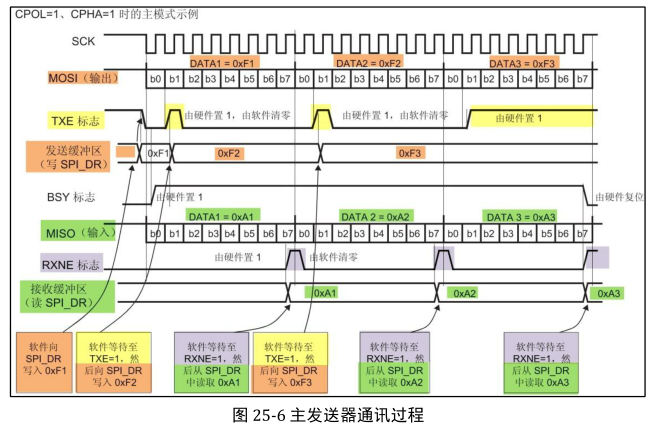
- (1) 拉低NSS信号线,产生起始信号(图中没有画出);(需要软件操作)
- (2) 把要发送的数据写入到“数据寄存器 DR”中,该数据会被存储到发送缓冲区;(需要软件操作)
- (3) 通讯开始,SCK 时钟开始运行。MOSI 把发送缓冲区中的数据一位一位地传输出去;MISO 则把数据一位一位地存储进接收缓冲区中;(我们不用管,单片机会自动帮我们完成!)
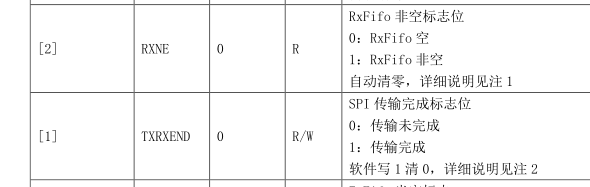
*(4) 当发送完一帧数据的时候,“状态寄存器 SR”中的“TXE 标志位”会被置 1,表示传输完一帧,发送缓冲区已空;类似地,当接收完一帧数据的时候,“RXNE标志位”会被置 1,表示传输完一帧,接收缓冲区非空;(需要软件操作,因为我们要做状态查询,通常是while死循环来保证数据被发送或接收) - (5) 等待到“TXE标志位”为1时,若还要继续发送数据,则再次往“数据寄存器DR”写入数据即可;等待到“RXNE 标志位”为 1时,通过读取“数据寄存器 DR”可以获取接收缓冲区中的内容;
- (6) 拉高 NSS信号线,产生结束信号(需要软件操作)
3. SPI个人协议理解
其实,对于任何一种MCU支持的协议来说,我们要做的就3步:
- 1、初始化
- 2、发送数据
- 3、接收数据
不过,spi协议在发送和接收数据前要拉低片选信号而已。对MCU操作来说,每款MCU的厂家给出的寄存器是不一样,在编写发送或接收函数时,每个MCU的编写函数是不一样的。这里,分析两家的,拿到一款芯片后,可以参考厂家demo编写,这才是最正确的,千万不要傻乎乎的自己从头到尾写。
第一家,意法半导体的STM32F103芯片。因为之前说过,SPI协议没有从设备发送ACK,所以主设备对于发送成功与否不得而知,但是可以知道数据buff是否发送完成,简单来说,数据发送成不成功我不知道,但是我知道数据发没发完。每个厂家设计的不一样,STM32检测buff是否发送完成依据接收缓冲区(没有写出错,是接收缓冲区)不为空(这样设计感觉挺奇怪的,没办法厂家就是这样设计的)

- 1)发送之前,先检测TXE,若发送缓冲区位空,则将数据写入发送数据寄存器;
- 2)等待数据发送完成(若RXNE为非空,则表示发送完成);
// 发送函数
u8 SPI_FLASH_SendByte(u8 byte)
{
SPITimeout = SPIT_FLAG_TIMEOUT;
/* 等待发送缓冲区为空,TXE事件 */
while (SPI_I2S_GetFlagStatus(FLASH_SPIx, SPI_I2S_FLAG_TXE) == RESET)
{
if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(0);
}
/* 写入数据寄存器,把要写入的数据写入发送缓冲区 */
SPI_I2S_SendData(FLASH_SPIx, byte); // 将一个字节的数据写入spi数据寄存器
SPITimeout = SPIT_FLAG_TIMEOUT;
/* 判断发送buff的数据是否完成,等待接收缓冲区非空,RXNE事件 */
while (SPI_I2S_GetFlagStatus(FLASH_SPIx, SPI_I2S_FLAG_RXNE) == RESET)
{
if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(1);
}
/* 读取数据寄存器 */
return SPI_I2S_ReceiveData(FLASH_SPIx );
}
// 接收函数
u8 SPI_FLASH_ReadByte(void)
{
// 通过写的方式,来读数据,感觉挺奇怪的
return (SPI_FLASH_SendByte(Dummy_Byte)); //Dummy_Byte为任意字节,无意义,但是必须要写,一般我们写0XFF
}
- 第二家,国内HUA芯片, 这款芯片就有专门的发送完成和是否接受到数据的状态寄存器,发送和接收逻辑符合我们通常的认知。写这两个函数的时候需要参考厂家demo。
// 发送函数
void Spim0SendData(UINT8 *data_buf, UINT16 len)
{
UINT16 *phalfword = (UINT16*)data_buf;
UINT32 *pword = (UINT32*)data_buf;
Spim0ClrFifo(); //清空发送缓冲区
Spim0RecAutorcvDis(); // 禁用自动接收
Spim0TransStart(); // 开始发送
Spim0ClrStatus(SPIM0_TXEND); // 清空发送完成寄存器
while(len)
{
if(len >= 8)
{
/*send 8 Byte data*/
for (UINT8 i = 0; i < 8; i++)
{
SPIM0->DR = *data_buf;
data_buf++;
}
len -= 8;
wrcnt += 8;
}
else if(len >= 4)
{
/*send 4 Byte data*/
for (UINT8 i = 0; i < 4; i++)
{
SPIM0->DR = *data_buf;
data_buf++;
}
len -= 4;
wrcnt += 4;
}
else
{
for (UINT8 i = 0; i < len; i++)
{
SPIM0->DR = *data_buf;
data_buf++;
len--;
}
}
while(!(Spim0GetStatus() & SPIM0_TXEND));
Spim0ClrStatus(SPIM0_TXEND);
}
Spim0TransStop();
}
// 接收函数
void Spim0RecvData( UINT8 *data_buf, UINT16 rev_len)
{
UINT16 *phalfword = (UINT16*)data_buf;
UINT32 *pword = (UINT32*)data_buf;
Spim0SetClk(rev_len & 0x3ff);/*set rx frames,the maxlen is 0x3ff bytes*/
Spim0ClrFifo();
Spim0RecAutorcvEn();/*only receive mode en*/
Spim0TransStart();
while(rev_len != 0)
{
if(rev_len >= 4)
{
/*receive 4 byte data*/
while(!(Spim0GetStatus() & SPIM0_RXHF));
*data_buf++ = SPIM0->DR;
*data_buf++ = SPIM0->DR;
*data_buf++ = SPIM0->DR;
*data_buf++ = SPIM0->DR;
rev_len -= 4;
}
else
{
while(!(Spim0GetStatus() & SPIM0_RXNE));
for(; rev_len>0; rev_len--)
{
*data_buf++ = SPIM0->DR;
}
}
}
Spim0TransStop();
}
4、使用SPI协议操作SPI外设芯片
需要先看外设芯片的数据手册,例如W25Q64 flash芯片的操作指令为,(下图中括号的数据为接收的数据):
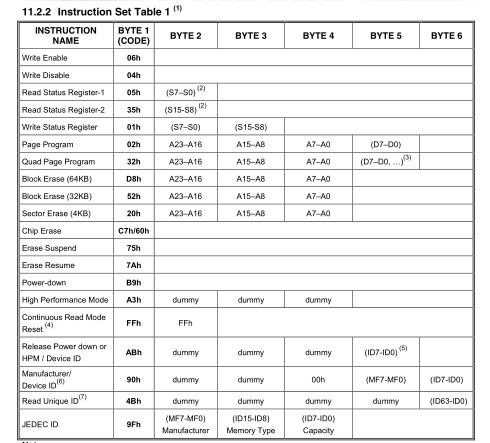
举个简单的例子,使用stm32读flash的设备ID:
u32 SPI_FLASH_ReadDeviceID(void)
{
u32 Temp = 0;
/* Select the FLASH: Chip Select low */
SPI_FLASH_CS_LOW();
/* Send "RDID " instruction */
SPI_FLASH_SendByte(W25X_DeviceID); // 0xAB
SPI_FLASH_SendByte(Dummy_Byte);
SPI_FLASH_SendByte(Dummy_Byte);
SPI_FLASH_SendByte(Dummy_Byte);
/* Read a byte from the FLASH */
Temp = SPI_FLASH_ReadByte(); // 等价于 Temp = SPI_FLASH_SendByte(Dummy_Byte);
/* Deselect the FLASH: Chip Select high */
SPI_FLASH_CS_HIGH();
return Temp;
}
总结
- 1、SPI协议主要写的就是发送和接收函数,发送和接收的数据需要看外设芯片的数据手册;
- 2、若MCU支持硬SPI协议,那我们一般用硬spi协议,若用软的,移植的时候不好移植,因为你不知道你的外设芯片支持哪种spi模式。如果MCU不支持SPI,现在你又需要SPI,这时就可以写个软的SPI协议。不过现在芯片一般都支持硬SPI了,除非为了节省成本,你的芯片很Low很Low。
- 软spi协议很简单,关于波特率,你不需要太过关系,只要不超过外设芯片的波特率就可以,至于具体是多少Hz,如果不追求速度的话,没有太大的关系,可以先调通spi,然后在调速。
- 软SPI协议如下(模式0): 可以看到,先操作的是数据IO,然后在操作SCK的IO。
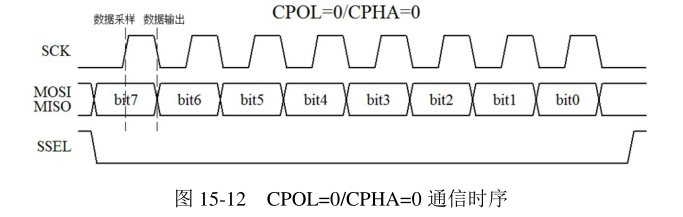
请务必参考上面的时序图,来看下面软spi模式0对应的代码,不然不知道原由:
// spi发送函数
void SpiByteWrite(unsigned char dat)
{
unsigned char mask;
for (mask=0x01; mask!=0; mask<<=1) //低位在前,逐位移出
{
if ((mask&dat) != 0) //首先输出该位数据
Set_MOSI_IO(1); // IO拉高
else
Set_MOSI_IO(0); // IO拉低
Set_SPI_CK(1); //然后拉高时钟,数据采样,IO拉高
Set_SPI_CK(0); //再拉低时钟,完成一个位的操作 ,IO拉低
}
Set_MOSI_IO(1); //最后确保释放 IO 引脚,IO拉高
}
// spi总线上读取一个字节
unsigned char DS1302ByteRead()
{
unsigned char mask;
unsigned char dat = 0;
for (mask=0x01; mask!=0; mask<<=1) //低位在前,逐位读取
{
if (Get_MISO_IO!= 0) //首先读取此时的 IO 引脚,并设置 dat 中的对应位
{
dat |= mask;
}
Set_SPI_CK(1); //然后拉高时钟,数据采样,IO拉高
Set_SPI_CK(0); //再拉低时钟,完成一个位的操作 ,IO拉低
}
return dat; //最后返回读到的字节数据
}
- 若其他模式,参考下面的图片,相信你也能自己写出对应的软SPI协议。
在时序上,SPI 比 I2C 简单多,没有了起始、停止和应答,和UART一样, SPI 在通信的时候,只负责通信,不管是否通信成功,而 I2C 却要通过应答信息来获取通信成功失败的信息,所以相对来说,UART 和 SPI 的时序都要比 I2C 简单一些。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/183982.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
